Рекомендации к выполнению первой части работы
4.1. Общие замечания. Все расчеты рекомендуется выполнять, представляя требуемые величины в векторно-матричном виде. В частности, совокупность параметров нагруженности, которые требуется определить по данным тензометрии, записывается в виде вектора  (
(  , где принято:
, где принято:  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  . Из показаний тензорезисторов формируется (см. п.4.2) вектор результатов измерений
. Из показаний тензорезисторов формируется (см. п.4.2) вектор результатов измерений  (
(  ). Непосредственным содержанием работы является составление и решение системы линейных уравнений, связывающих искомые неизвестные с экспериментальными данными:
). Непосредственным содержанием работы является составление и решение системы линейных уравнений, связывающих искомые неизвестные с экспериментальными данными:
 . (12)
. (12)
Здесь матрица  (
(  ;
;  ) является, по существу, специфической матрицей упругой податливости. Заметим сразу, что получаемая система является переопределенной, а элементы вектора правой части содержат неизбежные экспериментальные погрешности. Ее решение осуществляется с использованием метода наименьших квадратов (см. п.4.4).
) является, по существу, специфической матрицей упругой податливости. Заметим сразу, что получаемая система является переопределенной, а элементы вектора правой части содержат неизбежные экспериментальные погрешности. Ее решение осуществляется с использованием метода наименьших квадратов (см. п.4.4).
4.2. Первичная обработка данных тензометрии. В каждом варианте задания в качестве исходных экспериментальных данных предоставляется таблица значений выходных электронапряжений  в конкретных мостовых схемах Уитстона с приведением значений постоянного входного напряжения
в конкретных мостовых схемах Уитстона с приведением значений постоянного входного напряжения  и коэффициента чувствительности тензорезисторов
и коэффициента чувствительности тензорезисторов  . По этой информации должны быть рассчитаны величины линейных деформаций на поверхности трубы в месте приклейки датчиков в направлении их ориентации. При этом в сечениях с конфигурацией датчиков А1 (розетки) значения деформаций
. По этой информации должны быть рассчитаны величины линейных деформаций на поверхности трубы в месте приклейки датчиков в направлении их ориентации. При этом в сечениях с конфигурацией датчиков А1 (розетки) значения деформаций  (
(  – номер разетки,
– номер разетки,  – номер датчика в i-ой розетке) определяются для каждого из девяти резисторов с использованием формулы (3). Для конфигураций А2 и А3 (пары датчиков) по формулам (4) и (5) рассчитываются деформации в месте положения первого датчика пары:
– номер датчика в i-ой розетке) определяются для каждого из девяти резисторов с использованием формулы (3). Для конфигураций А2 и А3 (пары датчиков) по формулам (4) и (5) рассчитываются деформации в месте положения первого датчика пары:  и
и  , соответственно.
, соответственно.
|
|
|
Из полученных наборов значений деформаций формируются частные векторы исходных данных  , где верхний индекс k, как и ранее, обозначает порядковый номер соответствующего трубного звена. В случае конфигурации датчиков
, где верхний индекс k, как и ранее, обозначает порядковый номер соответствующего трубного звена. В случае конфигурации датчиков  по экспериментальным значениям определяется вектор
по экспериментальным значениям определяется вектор  . При этом используется соотношение переиндексации:
. При этом используется соотношение переиндексации:  . Для конфигураций
. Для конфигураций  и А3 непосредственно записываются трехкомпонентные векторы
и А3 непосредственно записываются трехкомпонентные векторы  и
и  (
(  ).
).
На заключительном этапе из полученных частных векторов формируется полный – составной – вектор экспериментальных данных. Для этого в один столбец последовательно один за другим – от первого до четвертого – записываются все векторы , полученные для отдельных звеньев:
 , . (13)
, . (13)
4.3. Процедура построения матрицы податливости. Как уже отмечалось, в каждом из сечений, содержащих системы тензодатчиков, рассматривается действие местных факторов внутренней нагруженности в локальных системах координат (рисунок 11): изгибающих моментов  и
и  , крутящего момента
, крутящего момента  , поперечных сил
, поперечных сил  и
и  , осевой силы
, осевой силы  и внутреннего давления
и внутреннего давления  , где
, где  – приращение давления в данном сечении по отношению к концевому сечению O. (Отметим, что величина в общем случае может принимать как положительные, так и отрицательные значения в зависимости от знака градиента
– приращение давления в данном сечении по отношению к концевому сечению O. (Отметим, что величина в общем случае может принимать как положительные, так и отрицательные значения в зависимости от знака градиента  .) Полный вектор параметров нагруженности в k-м сечении записывается в виде:
.) Полный вектор параметров нагруженности в k-м сечении записывается в виде:
|
|
|
 . (14)
. (14)
Введем также отдельно векторы моментов и усилий в сечении:
 ,
,  . (15)
. (15)
Тогда полный вектор параметров нагруженности может быть представлен в составном (блочном) виде:
 . (16)
. (16)
Обратим внимание на то, что, хотя перерезывающие усилия и не входят в число факторов, определяющих деформации, регистрируемые тензодатчиками (почему?), тем не менее, они присутствуют среди компонент векторов  . В дальнейшем это позволит придать необходимым преобразованиям формальный характер.
. В дальнейшем это позволит придать необходимым преобразованиям формальный характер.
Первым и основным этапом, требующим знания некоторых базовых соотношений сопромата[2], является формирование локальных матриц податливости  ;
;  , где
, где  – полное число измеряемых деформаций в данном сечении. (Для конфигураций A1 имеем
– полное число измеряемых деформаций в данном сечении. (Для конфигураций A1 имеем  , а для A2 и A3 –
, а для A2 и A3 –  .) Компоненты этих матриц, составляемых для каждого k-го сечения, представляют собой независимые вклады от единичных значений локальных факторов нагруженности в деформацию, измеряемую конкретным тензодатчиком. Сразу отметим, что, исходя из сказанного выше, получаем для всех сечений k:
.) Компоненты этих матриц, составляемых для каждого k-го сечения, представляют собой независимые вклады от единичных значений локальных факторов нагруженности в деформацию, измеряемую конкретным тензодатчиком. Сразу отметим, что, исходя из сказанного выше, получаем для всех сечений k:  . Кроме того,
. Кроме того,  , так как оба этих элемента определяют деформационные отклики от единичного давления в трубе. Таким образом, для каждого сечения формируется система уравнений:
, так как оба этих элемента определяют деформационные отклики от единичного давления в трубе. Таким образом, для каждого сечения формируется система уравнений:
|
|
|
 (17а)
(17а)
или в развернутом виде:
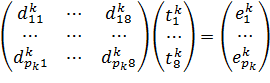 . (17б)
. (17б)
В сечениях с конфигурациями тензодатчиков типа A1 для каждого по отдельности единичного внутреннего фактора нагруженности первоначально должны быть получены выражения для компонент тензора деформаций  на поверхности трубы в трех точках, отвечающих положениям розеток на круговом контуре, рисунок 12. Далее осуществляется переход от компонент деформаций в осях
на поверхности трубы в трех точках, отвечающих положениям розеток на круговом контуре, рисунок 12. Далее осуществляется переход от компонент деформаций в осях  к линейным деформациям, непосредственно регистрируемым каждым из трех датчиков каждой из трех розеток. Для этого используется известная формула преобразования (компонент тензора) при повороте осей координат на произвольный угол φ:
к линейным деформациям, непосредственно регистрируемым каждым из трех датчиков каждой из трех розеток. Для этого используется известная формула преобразования (компонент тензора) при повороте осей координат на произвольный угол φ:
|
|
|
 . (18)
. (18)
(В конкретных рассматриваемых случаях в качестве  выступают, очевидно, углы ориентации датчиков
выступают, очевидно, углы ориентации датчиков  .) В итоге, рассчитанные числовые значения линейных деформаций задают компоненты искомой матрицы
.) В итоге, рассчитанные числовые значения линейных деформаций задают компоненты искомой матрицы  .
.
Для примера определим компоненты  , характеризующие деформационные отклики от действия единичного момента
, характеризующие деформационные отклики от действия единичного момента  . В этом случае зоны (точки) расположения розеток удалены от нейтральной оси изгиба (здесь это ось
. В этом случае зоны (точки) расположения розеток удалены от нейтральной оси изгиба (здесь это ось  ) на расстояния
) на расстояния  , где
, где  – наружный радиус трубы. Выражения для осевых и окружных деформаций имеют вид:
– наружный радиус трубы. Выражения для осевых и окружных деформаций имеют вид:
 ,
,  , (19)
, (19)
где  – момент инерции кольцевого сечения относительно нейтральной оси, Е – модуль Юнга материала,
– момент инерции кольцевого сечения относительно нейтральной оси, Е – модуль Юнга материала,  – коэффициент Пуассона. Деформации вдоль осей чувствительности отдельных тензодатчиков в розетках, вычисляемые по формуле (18), собственно, и являются соответствующими искомыми компонентами матрицы податливости:
– коэффициент Пуассона. Деформации вдоль осей чувствительности отдельных тензодатчиков в розетках, вычисляемые по формуле (18), собственно, и являются соответствующими искомыми компонентами матрицы податливости:
 , . (20)
, . (20)
Так, положим в демонстрационном варианте задания:  ,
,  ,
,  ,
,  ( и
( и  – внутренний и наружный радиусы сечения трубных звеньев[3]). Тогда с учетом конкретных значений углов
– внутренний и наружный радиусы сечения трубных звеньев[3]). Тогда с учетом конкретных значений углов  и получаем числовые значения компонент
и получаем числовые значения компонент  , в частности, для первого звена, где по условию реализована конфигурация расположения тензодатчиков A1 (см. п.4.6):
, в частности, для первого звена, где по условию реализована конфигурация расположения тензодатчиков A1 (см. п.4.6):
| i, j | β1 = 90о | β2 = 45о | β3 = 0о |
| α1 = 0о | 
| 
| 
|
| α2 = 120о | 
| 
| 
|
| α3 = 240о | 
| 
| 
|
Размерности компонент в таблице не указаны, но они без труда могут быть установлены из общих формул и с учетом того, что все исходные величины здесь заданы в основных единицах системы СИ.
В звене, в котором присутствуют пары датчиков, включаемых в мост Уитстона по схеме II (конфигурация A2), расчету подлежат лишь компоненты и  (i = 1, 2, 3). Они характеризуют антисимметричную осевую деформацию, вызванную действием единичных изгибающих моментов. Остальные составляющие матрицы здесь равны нулю.
(i = 1, 2, 3). Они характеризуют антисимметричную осевую деформацию, вызванную действием единичных изгибающих моментов. Остальные составляющие матрицы здесь равны нулю.
В звене с парами датчиков, подключаемых по схеме III (конфигурация A3), имеет место противоположная ситуация: учету подлежат только однородные по сечению (строго говоря – симметрично распределенные) осевые деформации, а компоненты  .
.
На следующем этапе внутренние факторы нагруженности должны быть связаны с внешними. Такой переход целесообразно осуществить в два формальных шага.
На первом шаге в каждом рассматриваемом сечении производится переход от локальных систем координат к глобальной лабораторной системе  , что ведет к преобразованию левой части системы уравнений (17). С этой целью используются специальным образом построенные матрицы преобразования. Для их получения необходимо выразить орты каждой локальной системы
, что ведет к преобразованию левой части системы уравнений (17). С этой целью используются специальным образом построенные матрицы преобразования. Для их получения необходимо выразить орты каждой локальной системы  ,
,  ,
,  в координатах глобальной (с ортами
в координатах глобальной (с ортами  ,
,  ,
,  ):
):
 (21)
(21)
Так как звенья стержня взаимно ортогональны, то коэффициенты указанных разложений могут принимать лишь значения 0 и ±1. Из координат локальных ортов по строкам формируются требуемые матрицы преобразования  размерности 3×3:
размерности 3×3:
 . (22)
. (22)
Так, в демонстрационном варианте задания эти матрицы имеют вид:
 ,
,  ,
,
 ,
,  .
.
С помощью полученных матриц преобразуются векторы моментов и усилий в сечениях стержня:
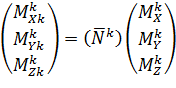 ,
,  , (23а)
, (23а)
 ,
,  (23б)
(23б)
Здесь нижний индекс «0» в обозначениях  и
и  означает, что векторы полученных локальных факторов нагруженности теперь отнесены к общей системе координат XYZ.
означает, что векторы полученных локальных факторов нагруженности теперь отнесены к общей системе координат XYZ.
Из частных матриц составляются общие блочные матрицы  размерности 8×8 для преобразования полного вектора факторов нагруженности в k-ом звене:
размерности 8×8 для преобразования полного вектора факторов нагруженности в k-ом звене:
 , где
, где  ,
,  . (24)
. (24)
Наличие в ее структуре единичной подматрицы  объясняется тем, что давление
объясняется тем, что давление  является скалярной величиной, инвариантной к применяемым преобразованиям координат.
является скалярной величиной, инвариантной к применяемым преобразованиям координат.
Таким образом, системы уравнений (17) теперь можно записать в виде:
 , где
, где  . (25)
. (25)
Второй шаг состоит в выражении локальных векторов неизвестных  через искомый вектор
через искомый вектор  . Можно показать (убедитесь в этом самостоятельно), что здесь справедливы следующие соотношения:
. Можно показать (убедитесь в этом самостоятельно), что здесь справедливы следующие соотношения:
 , (26)
, (26)
где  – координаты (в глобальной системе координат ) точек (сечений) середин звеньев ломаного стержня, в которых производится съем информации тензодатчиками,
– координаты (в глобальной системе координат ) точек (сечений) середин звеньев ломаного стержня, в которых производится съем информации тензодатчиками,  – расстояние до этих точек от начала координат О вдоль пространственной траектории стержня. Иными словами, требуемые преобразования формально осуществляются с помощью умножения вектора на матрицы
– расстояние до этих точек от начала координат О вдоль пространственной траектории стержня. Иными словами, требуемые преобразования формально осуществляются с помощью умножения вектора на матрицы  размерности 8×8 вида:
размерности 8×8 вида:
 , (27)
, (27)
то есть
 . (28)
. (28)
В результате двух рассмотренных преобразований получаемые для каждого k-го звена системы уравнений (17) приобретают вид:
 , (29а)
, (29а)
где
 . (29б)
. (29б)
Наконец, искомая матрица полной переопределенной системы уравнений, то есть матрица податливости  , формируется как блочная, составленная из частных матриц
, формируется как блочная, составленная из частных матриц  :
:
 . (30)
. (30)
4.4. Решение переопределенной системы уравнений. Сформированная линейная система  содержит 24 уравнения относительно 8 неизвестных. Так как ее правая часть, то есть вектор измеренных деформаций
содержит 24 уравнения относительно 8 неизвестных. Так как ее правая часть, то есть вектор измеренных деформаций  , задана, как правило, с неизбежными экспериментальными погрешностями, то система является несовместной. Ее решение осуществляется по методу наименьших квадратов, который, по существу, минимизирует норму невязки правой части:
, задана, как правило, с неизбежными экспериментальными погрешностями, то система является несовместной. Ее решение осуществляется по методу наименьших квадратов, который, по существу, минимизирует норму невязки правой части:
 , (31)
, (31)
где  – значения компонент вектора правой части после подставления в уравнения системы вычисленных значений компонент вектора .
– значения компонент вектора правой части после подставления в уравнения системы вычисленных значений компонент вектора .
Для получения решения сначала переходят к так называемой нормальной системе путем умножения исходной системы уравнений, записанной в матричном виде, слева на транспонированную матрицу  :
:
 . (32)
. (32)
Матрица  положительно определена и имеет размерность 8×8, и, следовательно, система уравнений (32) однозначно решается относительно 8 неизвестных. Для этого используется, например, метод последовательных исключений Гаусса. Если же тем или иным способом вычислить обратную матрицу
положительно определена и имеет размерность 8×8, и, следовательно, система уравнений (32) однозначно решается относительно 8 неизвестных. Для этого используется, например, метод последовательных исключений Гаусса. Если же тем или иным способом вычислить обратную матрицу  , то искомый вектор получается в явном виде после умножения на нее обеих частей матричного соотношения (32):
, то искомый вектор получается в явном виде после умножения на нее обеих частей матричного соотношения (32):
 . (33)
. (33)
4.5. Общий порядок выполнения расчетов. Резюмируя сказанное выше, устанавливается следующая последовательность действий при выполнении работы.
1. На основе исходных данных тензометрических измерений с использованием формул (3) – (5) и (13) формируется полный вектор деформационных откликов ( ).
Примечание : данные действия могут производиться и непосредственно перед выполнением заключительного п.8.
2. Определяются локальные системы координат  в каждом звене составного пространственного стержня (
в каждом звене составного пространственного стержня (  ).
).
3. С использованием базовых соотношений сопромата вычисляются компоненты локальных матриц податливости , отнесенные к заданным сечениям звеньев пространственного стержня. Эти компоненты представляют собой значения линейных деформаций в направлении осей чувствительности тензорезисторов, вызываемых действием единичных локальных факторов нагруженности. (Если в двух звеньях  и
и  задействована одна и та же конфигурация датчиков с идентичными наборами ориентационных углов и , то матрицы податливости для них будут одинаковы:
задействована одна и та же конфигурация датчиков с идентичными наборами ориентационных углов и , то матрицы податливости для них будут одинаковы:  .)
.)
4. Для всех звеньев по формулам (21), (22) определяются частные матрицы преобразования векторов при линейных изменениях систем координат. В итоге составляются общие блочные матрицы по формуле (24). (Заметим, что для первого звена (k = 1) все частные и блочная матрицы являются единичными, так как локальная система координат здесь идентична глобальной.)
5. Для всех звеньев определяются координаты срединных сечений в глобальной системе координат и расстояния вдоль пространственной траектории стержня от этих сечений до концевого сечения О.
По формуле (27) формируются матрицы преобразования .
6. Выполняются преобразования локальных матриц, состоящие из двух (для каждого звена k) последовательных матричных перемножений:
 .
.
С использованием формулы (30) составляется общая – блочная – матрица упругой податливости .
7. Далее, как последовательные шаги решения по методу наименьших квадратов полученной переопределенной системы линейных уравнений, выполняются следующие матричные операции:
· строится транспонированная матрица ;
· выполняется матричное умножение  ;
;
· ищется обратная матрица  ;
;
· выполняется матричное умножение 
8. В итоге искомый вектор факторов нагруженности  вычисляется по формуле (33).
вычисляется по формуле (33).
Дата добавления: 2021-04-07; просмотров: 149; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!