Кинематические цепи и механизмы
Кинематическая цепь – это система звеньев, связанных между собой кинематическими парами. Кинематические цепи делятся на п р о с т ы е и с л о ж н ы е. Простая кинематическая цепь включает в себя звенья, входящие не более чем в две кинематические пары (рис. 1.9, а). Сложная кинематическая цепь – это цепь, в которой есть хотя бы одно звено, входящее более чем в две кинематические пары (рис. 1.9, б).
Простые и сложные кинематические цепи делятся на з а м к н у т ы е и н е з а м к н у т ы е. Замкнутая кинематическая цепь своими звеньями образует один или несколько замкнутых контуров (рис. 1.9, в, г). Примером незамкнутой цепи может быть складной метр, а замкнутой – автомобильная или велосипедная цепь.


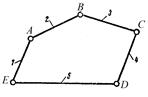
а б в г
Рис. 1.9
Кроме того, кинематические цепи могут быть п л о с к и м и и п р о с т -р а н с т в е н н ы м и.
 Рис. 1.10
Рис. 1.10
| Если в замкнутой кинематической цепи одно из звеньев сделать неподвижным (например, звено DЕ на рис. 1.9, в), цепь превращается в механизм. Неподвижное звено механизма называется стойкой или опорой (DЕ, рис. 1.10). У полученного механизма на рис. 1.10 пять звеньев (АВ, ВС, СD, DЕ и ЕА), соединенных между собой пятью вращательными кинематическими парами (А, В, С, D, Е). |
На рис. 1.1, а, б изображены конструктивная и кинематическая схемы механизма четырехтактного двигателя внутреннего сгорания, который имеет в своем составе три подвижных звена 2, 3, 4 и одно неподвижное 1 (корпус). В данном механизме возвратно-поступательное движение звена 2 в цилиндре преобразуется во вращательное движение звена 4 (коленчатого вала).
|
|
|
Кинематическая схема механизма является его кинематической моделью. Она строится в выбранном масштабе с точным соблюдением размеров и форм, при изменении которых изменяются положения, скорости и ускорения точек механизма. Такая схема нужна для изучения движения механизма.
Структурная формула кинематической цепи
В пространстве каждое звено обладает шестью степенями свободы. Если k – число звеньев кинематической цепи, то общее число степеней свободы, которым обладают k звеньев до их соединения в кинематические пары, равно 6k. Соединение звеньев в кинематические пары накладывает разное число ограничений на относительное движение, зависящее от класса кинематических пар. Если число пар I класса – р1, II класса – р2, третьего – р3 и т. д., то число степеней свободы Н, которое имеет кинематическая цепь, равно
 (1.3)
(1.3)
Если одно звено цепи неподвижное, то общее число степеней свободы цепи уменьшится на 6 и число степеней свободы относительно стойки W будет равно
|
|
|
 (1.4)
(1.4)
Число степеней свободы кинематической цепи относительно стойки (W) называется степенью свободы цепи. Подставив в формулу (1.4) вместо Н его выражение из соотношения (1.3), получим
 (1.5)
(1.5)
Заменим величину  через n и получим
через n и получим
 (1.6)
(1.6)
Где п – число подвижных звеньев цепи.
Равенство (1.6) называется структурной формулой кинематической цепи (формула Сомова-Малышева).
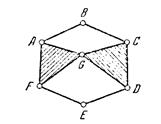
Пример. Определить степень свободы замкнутой пространственной кинематической цепи (рис. 1.11, а, б), у которой п = 3 (2, 3, 4); р4 = 1 (С); р5 = 2 (А, В); р3 = 1 (D).

Рис. 1.11
Подставив числа звеньев и пар в формулу (1.6), получим

Предложенная кинематическая цепь имеет одну степень свободы.
Дата добавления: 2020-11-27; просмотров: 188; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!