Основные понятия и определения
Теория механизмов – это наука, изучающая строение, кинематику и динамику механизмов в связи с их анализом и синтезом.
Проблемы теории механизмов можно разбить на две группы: первая – анализ механизмов, посвященная исследованию структурных, кинематических и динамических свойств механизмов; вторая – синтез механизмов, посвященная проектированию механизмов с заданными структурными, кинематическими и динамическими свойствами для осуществления требуемых движений.
Движение механизмов зависит от их строения и действующих на них сил. Поэтому удобно задачи анализа разделить на две части:
а) структурный и кинематический анализ механизма;
б) динамический анализ механизма.
Структурный и кинематический анализы исследуют работу механизма без учета действующих сил.
Цель динамического анализа – определение действующих на детали механизма сил и взаимосвязь с массами этих деталей.
Твердые тела, из которых образуется любой механизм, называются звеньями. Каждое звено может состоять из одной или нескольких деталей, но в составе звена они не должны иметь относительного движения, т. е. неразъемные или разъемные соединения отдельных деталей. Примером может быть колесо автомобиля, которое состоит из нескольких деталей, не имеющих взаимного перемещения.
Неподвижное звено механизма, относительно которого рассматривается движение подвижных звеньев, называется стойкой (корпус двигателя, станина станка).
|
|
|
Звенья могут бытьвходными и выходными, ведущими и ведомыми, начальными и промежуточными.
Входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемое движение выходного звена.
Выходное звено – звено, совершающее движение, для которого предназначен механизм.
Звено называется ведущим в том случае, если мощность приложенных к нему внешних сил положительна. Если она отрицательна или равна нулю, то звено называется ведомым.
В зависимости от назначения механизма звенья имеют функциональные названия: кривошип, шатун, коромысло, поршень, шток, ползун, кулачок, толкатель, колесо зубчатое, водило, сателлит, траверса, коленчатый вал и т. д.
Например, на рис. 1.1 изображены конструктивная (а) и кинематическая (б) схемы механизма четырехтактного двигателя внутреннего сгорания, состоящего из корпуса (стойки) 1, ползуна (поршня) 2, шатуна 3 и кривошипа 4.
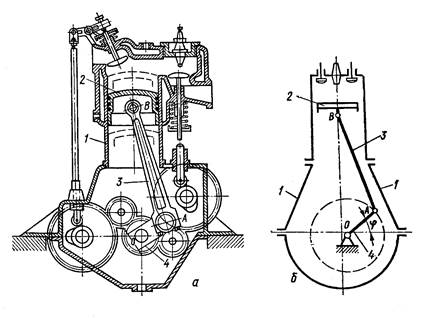
Рис. 1.1
В конкретных механизмах входное звено может быть ведущим и ведомым на отдельных этапах движения в зависимости от приложенных сил и моментов сил. Например, вал двигателя в режимах разгона и торможения.
Кинематические пары и их классификация
|
|
|
Первым этапом образования механизмов является соединение двух звеньев. Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
На относительное движение каждого звена кинематической пары накладываются ограничения, зависящие от способа соединения звеньев пары. Эти ограничения называются условиями связи (S).
Всякое звено в пространстве имеет шесть степеней свободы. Положение его фиксируется девятью координатами (хА, уА, z А), (хВ, уВ, z В) и (хС, уС, z С). Относительно осей оно обладает тремя вращениями вокруг осей х, у, z и тремя поступательными движениями вдоль тех же осей (рис. 1.2).
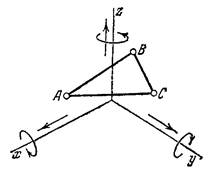 Рис. 1.2
Рис. 1.2
| Число условий связи (S) может быть только целым числом и должно быть меньше шести, так как, если оно будет равно шести, то кинематическая пара превратится в жесткое соединение двух звеньев. Число условий связи (S) не может быть меньше единицы, так как звенья не будут соприкасаться, и кинематическая пара перестанет существовать. Таким образом, 1 ≤ S ≤ 5, значит число степе- |
ней свободы звена (Н) можно выразить зависимостью
 . (1.1)
. (1.1)
|
|
|
1.2.1. Все кинематические пары делятся на к л а с с ы в зависимости от числа условий связи, налагаемых ими на относительное движение их звеньев. Так как число условий связи может быть от 1 до 5, то число классов пар равно 5 (I, II, III, IV, V). Класс кинематической пары определяется числом наложенных условий связи (S)
 . (1.2)
. (1.2)
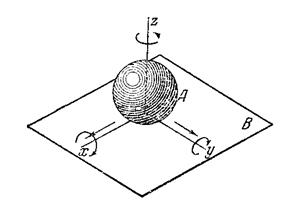 Рис. 1.3
Рис. 1.3
| Рассмотрим примеры. На рис. 1.3 представлена кинематическая пара в виде шара А, перекатывающегося по плоскости В. Движение шара относительно плоскости может быть разложено на три вращения вокруг осей х, у, z и движение по плоскости В, но только вдоль осей х и у, так как движение вдоль оси z нарушит соприкосновение звеньев, и кинематическая пара перестанет существовать. В этом случае |
число степеней свободы звеньев равно 5, а число условий связи определяется так:
Поэтому пара на рис. 1.3 относится к парам I класса.
Примером пары II класса является цилиндр А, находящийся на плоскости В (рис. 1.4). Движение цилиндра А относительно плоскости В сводится к враще-
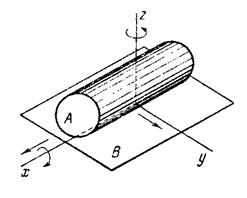 Рис. 1.4
Рис. 1.4
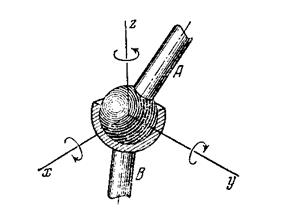 Рис. 1.5
Рис. 1.5
| нию вокруг осей х и z и скольжению вдоль осей х и у. Таким образом, число возможных движений равно 4 (Н = 4), а невозможных – 2. То есть число условий связи равно:
Это четырехподвижная пара относится к парам II класса. На рис. 1.5 показан пример пары III класса. Звено А с шаром на конце соприкасается с шаровой плоскостью В. Относительно осей звено А может только вращаться. Значит, число степеней свободы Н равно 3 и число условий связи S равно 3, т. е. пара III класса трехподвижная, шаровая, сферическая.
| |||
|
Рис. 1.6
Рис. 1.7
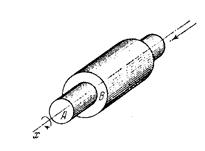
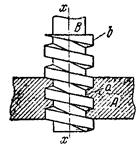
Рис. 1.8 | Пример пары IV класса представлен на рис. 1.6. Звено А (цилиндр) находится в полом цилиндре В и может относительно него скользить вдоль оси х или вращаться вокруг оси х. В этом случае Н = 2, S = 4, двух подвижная пара IV класса. Наконец, если одно звено А относительно звена В перемещается только вдоль оси х (рис. 1.7), это будет одноподвижная пара с Н = 1 и S = 5. Такая пара относится к парам V класса. К парам V класса относится и винтовая пара (рис. 1.8). Звенья пары А и В имеют и поступательное, и вращательное движение относительно оси х. Эти два движения связаны условием: если звено В не будет вращаться, то и не будет перемещаться относительно звена А. | |||
 .
.

Внутри каждого класса кинематические пары подразделяются на виды в зависимости от различных сочетаний допускаемых или ограниченных в них движений.
1.2.2. Кинематические пары делятся на в ы с ш и е и н и з ш и е. Кинематическая пара, которая может быть выполнена соприкосновением элементов ее звена только по линиям или в точках, называется высшей. На рис. 1.3 и 1.4 изображены высшие кинематические пары, а на рис. 1.5, 1.6, 1.7, 1.8 – низшие кинематические пары, т. к. эти пары образованы соприкосновением элементов звеньев пары по поверхности.
Чтобы элементы кинематических пар находились в постоянном соприкосновении, они должны быть замкнуты. Замыкание может быть геометрическим или силовым. Кинематические пары, изображенные на рис. 1.5-1.8, замкнуты геометрически, так как касание элементов звеньев этих пар обеспечивается их геометрическими формами, а чтобы пары, показанные на рис. 1.3 и 1.4, были замкнуты, шар и цилиндр необходимо прижимать к плоскости силой, это силовое замыкание. Силовое замыкание осуществляется силой веса, силой упругости пружин и другими способами.
Условные обозначения кинематических пар показаны в табл. 1.1.
Таблица 1.1
Классификация кинематических пар
| Условное обозначение | Класс пары | Количество | Примеры кинематических пар | ||
| связей | Степеней свободы | ||||

| I | S=1 | W=5 | 
| |

| II | S=2 | W=4 | 
| |

| III | S=3 | W=3 | 
| |

| IV | S=4 | W=2 | 
| |

| V | S=5 | W=1 | 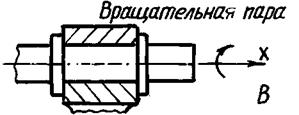
| |

| V | S=5 | W=1 | 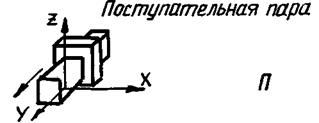
| |
1.2.3. Кинематические пары бывают в р а щ а т е л ь н ы е (см. рис. 1.5, 1.6), когда соединение образовано двумя цилиндрическими (или шаровыми) поверхностями, позволяющими двум звеньям вращаться друг относительно друга, и п о с т у п а т е л ь н ы е (см. рис. 1.7), когда звенья перемещаются между собой поступательно.
Дата добавления: 2020-11-27; просмотров: 279; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!