Взятие частной производной для построения Якобиана
После того, как положение и ориентация захвата были рассчитаны, необходимо рассчитать частные производные этих уравнений относительно сочленений q. Для простоты Якобиан будет разбит на 2 части Jv и Jw, соответственно, представляет линейную и угловую скорости захвата.
Линейная часть скорости Якобиана имеет вид:

Угловая часть скорости Якобиана:
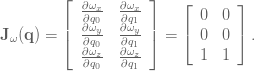
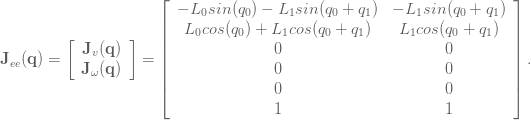
Полный Якобиан для захвата:
Анализируем Якобиан
Когда Якобиан построен, его можно проанализировать для понимания отношений между x˙ и q˙. Например, имеется большой блок нулей в середине Якобиана, определенного выше, вдоль строки, соответствующей линейной скорости вдоль оси z, и строк, соответствующих угловым скоростям вокруг осей x и y. Это означает, что положение z и повороты ω x и ω y не контролируются. Это можно увидеть, вернувшись к первому уравнению Якоби:

Вне зависимости от значений q˙, невозможно влиять на ω x, ω y и z, потому что соответствующие строки при умножении на Якобиан, что выше, =0. Эти нулевые строки в Якобиане называются ноль-пространством, т.к. эти переменные нельзя контролировать, они будут удалены из обоих Fx и J ( q ).
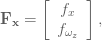
Рассмотрев переменные, на которые можно влиять, видно, что при учёте любых 2х из них: x, y, ω z, 3ю можно вычислить. Потому что у робота только 2 степени свободы (плечо, локоть). Значит, фактически могут контролироваться только 2 переменных захвата. При управлении рукой робота наиболее полезно контролировать координаты ( x , y ), поэтому элемент ω z будет выброшен из вектора сил и Якобиана. После удаления избыточного члена вектор управляемых сил захвата равен:
|
|
|

где fx – сила вдоль оси x, fy – сила вдоль оси y, а упрощённый Якобиан[1] записывается:

Если выбрать контролируемую силу крутящего момента вокруг оси z (f ω z) вмеcто fy, тогда вектор сил и Якобиан будут записаны (предполагая действие силы вдоль оси x):

Но мы будем придерживаться управления силами x и y – это проще.
Применения Якобиана
С помощью Якобиана можно определить, какие угловые скорости соединений будут появляться из разных линейных и угловых скоростей захвата, также можно преобразовать желаемые силы ( x , y ) в крутящие моменты ( q 0 , q 1 ).
Обратите внимание, что в первом примере будет полный Якобиан, а во втором примере – упрощённый Якобиан (указанный выше).
Пример 1
Задана рука робота, длина сегментов Li =1, угловые конфигурации и скорости сочленений:
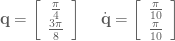
Скорость захвата ( x , y ) вычисляется подстановкой состояния системы в текущий момент в уравнение Якобиана:

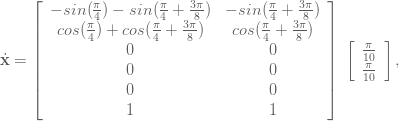

Линейная скорость захвата =  , угловая скорость захвата =
, угловая скорость захвата =  .
.
Пример 2
|
|
|
Рассмотрим ту же систему с той же конфигурацией, а также траекторию, запланированную в пространстве ( x , y ). Цель в том, чтобы рассчитать крутящие моменты, чтобы захват двигался вдоль этой траектории. Управляемыми переменными будут силы вдоль осей x и y, поэтому будет использован упрощённый Якобиан.
Пусть желаемые силы ( x , y ) будут:

чтобы вычислить соответствующие крутящие моменты сочленений для желаемых сил захвата, параметры текущего состояния системы подставим в уравнение, связывающее силы пространства захвата и пространства сочленений:


Таким образом, сейчас у нас есть конфигурация для ведения захвата вдоль траектории без учёта эффектов инерции и гравитации, а крутящие моменты, применяемые к системе, равны  . Теперь можно преобразовать силы захвата в крутящие моменты, а угловые скорости сочленений в скорость захвата!
. Теперь можно преобразовать силы захвата в крутящие моменты, а угловые скорости сочленений в скорость захвата!
Выводы
В этой части рассмотрено использование Якобиана для связи движения углов соединений и состояния захвата, а также для связи любых 2х характеристик системы. Для этого нужно определить одно в терминах другого и взять частные производное. Приведённые выше примеры сценариев были, конечно, очень просты и не заботились о компенсации чего-либо вроде гравитации. Именно это, будет рассмотрено в следующей главе!
|
|
|
Ориентация захвата важна, она определяет, можно ли поднять объект или нет.
Если Вам интересно больше узнать, об этом, рекомендую ознакомиться: «Кинематика скорости – Якобиан манипулятора» (‘Velocity kinematics – The manipulator Jacobian’) – отличный online ресурс.
[1] reduced Jacobian
Дата добавления: 2019-11-16; просмотров: 230; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!