Строим матрицу прямого преобразования
ROBOT CONTROL
2. Якобиан, скорость и сила
https://studywolf.wordpress.com/2013/09/02/robot-control-jacobians-velocity-and-force/
Матрица Якоби – полезный инструмент, который широко используется в робототехнике и теории управления, определяет динамические отношения между двумя различными представлениями системы.
Например, для двухзвенного манипулятора есть два очевидных способа описать его текущее положение:
1) положение и ориентация захвата x,
2) набор углов сочленений q.
Якобиан двухзвенного манипулятора соотносит как движение сочленений q вызывает движение захвата x. Якобиан – это матрица преобразования скоростей. Формально Якобиан – это система уравнений в частных производных:

После небольшого преобразования, можно получить более аккуратный результат:
или
 ,
,
где x˙ и q˙ – производные по времени от x и q. Скорость перемещения захвата x˙ равна Якобиану J, умноженному на скорость изменения углов сочленений q˙.
Мы заинтересованы в планировании траектории в другом пространстве (в операционном пространстве), чем то, которое можем контролировать напрямую (пространство сочленений). Управление рукой робота осуществляется с помощью набора двигателей, которые прикладывают крутящий момент к углам соединений, но планировать траекторию хотелось бы с точки зрения положения захвата (и его ориентации). Якобиан позволяет напрямую рассчитать, какой сигнал управления в силах (крутящих моментах) нужно подать, чтобы обеспечить необходимое положение и скорость захвата на траектории.
|
|
|
Энергетическая эквивалентность и Якобианы
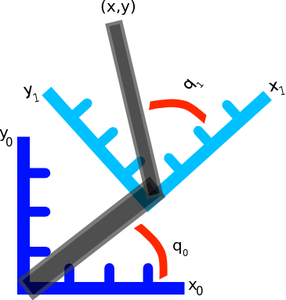
Сохранение энергии – это свойство всех физических систем, в которых количество затраченной энергии одинаково, независимо от того, как эта система представлена. Плоская двухзвенная рука робота, показанная ниже, будет использована для иллюстрации.


Работа – это приложение силы на протяжении расстояния:

где W – работа, F – сила, v – скорость.
Мощность есть темп, с которой работа выполняется:

Подставляя вместо W её выражение в уравнение мощности:

Из-за эквивалентности энергии работа выполнятся с тем же темпом, независимо от характеристики системы. Запишем этот член в пространстве захвата:

где  – сила, приложенная к захвату, x˙ – скорость захвата.
– сила, приложенная к захвату, x˙ – скорость захвата.
Запишем уравнение выше в пространстве сочленений:

где  – крутящие моменты, приложенные к сочленениям, q˙ – угловая скорость сочленений.
– крутящие моменты, приложенные к сочленениям, q˙ – угловая скорость сочленений.
Приравнивая 2 последних выражения мощности и подставляя их в формулу Якобиана:



где  – Якобиан захвата робота, а
– Якобиан захвата робота, а  – силы в пространстве сочленений, которые влияют на движение захвата. Это говорит о том, что Якобиан не только соотносит скорости при переходе от одного состояния робота в другое, но также может использоваться для расчёта сил в пространстве сочленений, чтобы воздействовать на желаемый набор сил в операционном пространстве.
– силы в пространстве сочленений, которые влияют на движение захвата. Это говорит о том, что Якобиан не только соотносит скорости при переходе от одного состояния робота в другое, но также может использоваться для расчёта сил в пространстве сочленений, чтобы воздействовать на желаемый набор сил в операционном пространстве.
|
|
|
Строим матрицу прямого преобразования
Во-первых, нужно определить взаимосвязь между положением захвата ( x , y , z ) и углами сочленений робота (q0, q 1 ). Нам известны расстояния от плеча до локтя и от локтя до запястья, а также углы суставов, нужно выяснить, где находится захват относительно глобальной системы координат, для этого используем матрицы прямого преобразования из предыдущей части.
Напомним, что матрицы преобразований позволяют преобразовывать координаты позиции между разными системами отсчёта. В нашем случае известно положение захвата в координатах второго сочленения робота, а нам нужно в глобальных координатах (а это всего-то в системе отсчёта первого сочленения). Значит, требуется только одна матрица преобразования из системы отсчёта второго сочленения в глобальные координаты.
Преобразование вращения в этой матрице просто определяется, как в части ранее:

Преобразование перевода в этой матрице немного отличается, потому что система отсчёта 1 изменяется, как функция угла предыдущего соединения. По тригонометрии позиция захвата определяется, как x = r cos ( q ), y = r sin ( q ), учитывая вектор длины r и угол q. Рука работает в плоскости ( x , y ), поэтому положение z всегда будет =0. Используя эти знания, преобразование перевода этой матрицы определяется:
|
|
|

Это даёт матрицу прямого преобразования:

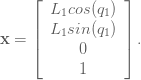
она преобразует координаты позиции в системе отсчёта 1 (локтя) в координаты в системе отсчёта 0 (плеча/глобальную). Позиция захвата, определённая в системе отсчёта 1, как функция от угла сочленения q 1 и длины второго сегмента руки L 1:
Чтобы найти позицию захвата в глобальных координатах, умножим точку x на трансформацию  :
:


где, без учёта L 1 с помощью тригонометрических тождеств получим:

и

тогда позиция захвата может быть переписана, как:
x = 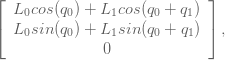
Учёт ориентации захвата
К счастью, определить ориентацию просто, особенно для систем только с поворотными и призматическими соединениями (сферические соединения здесь не рассматриваются). В призматических соединениях, которые являются линейными и движутся в одной плоскости, вращение равно 0. В случае поворотных соединений вращение захвата есть просто сумма вращений каждого соединения в соответствующих им осях.
|
|
|
В нашем примере суставы вращаются вокруг оси z, поэтому преобразование вращения в состоянии захвата равно:
где ω обозначает угловое вращение. Если первое сочленение вращалось бы в другой плоскости, например, в плоскости ( x , z ) вокруг оси y, тогда ориентация была бы:

Дата добавления: 2019-11-16; просмотров: 376; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!