Математические модели систем управления
На самом верхнем уровне абстрагирования наибольшее распространение в теории управления имеют ММ СУ, полученные в виде структурных схем и графов [13]. Структурной схемой СУ называют ее графическое изображение в виде соединений звеньев, в которых осуществляется преобразование входного сигнала в выходной. Каждое звено моделирует реальные устройства СУ, при этом не всегда разделение звеньев в структуре системы соответствует «естественному». Некоторые естественные звенья «математически» объединяются в одно, а другие, наоборот, разделяются для удобства дальнейших исследований СУ. Звенья систем управления делят на три группы: линейные безынерционные звенья, нелинейные безынерционные звенья, линейные инерционные звенья.
На основе структурных схем проводят исследования СУ в целом: формируется ее облик и функциональная схема, осуществляется выбор устройств.
Удобным для исследования отображением структурных схем СУ являются ориентированные графы, которые применительно к СУ обладают следующими свойствами:
- дуги графа изображают звено и характеризуются оператором этого звена – передаточная функция, уравнение звена;
- каждой вершине ставится в соответствие одна из переменных. Согласно с правилами работы с графами вершина, к которой подходит одна или несколько дуг, соответствует переменной, равной выходу одной дуги или сумме выходов дуг. Если из вершины исходит несколько дуг, то входная величина для всех дуг одна и та же.
|
|
|
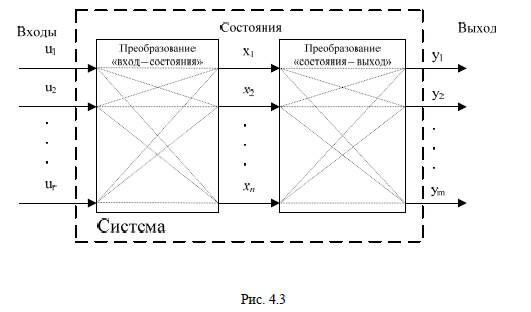
Также на первом (верхнем при нисходящем проектировании) уровне абстрагирования (рис. 4.2) используется описание СУ в пространстве состояний для исследования управляемости и наблюдаемости многомерных систем, которые в отличие от одномерных имеют несколько входов и несколько выходов.
Для описания таких систем используются три набора параметров (три вектора) (рис. 4.3):
- вектор входных воздействий (управлений);
- вектор переменных состояний; вектор выходных параметров. Кроме того, используются два преобразования: преобразование «входы-состояния»;
- преобразование «состояния-выходы».
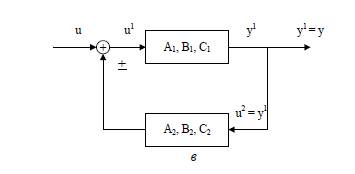
Широкое распространение, обусловленное разработанным математическим аппаратом, получили линейные модели многомерных систем в пространстве состояний, которые имеют вид:

первое соотношение называется уравнением состояния, второе – уравнением выхода. Здесь x = (x1, x2, …, xn)T Rn – вектор переменных состояний; u = (u1, u2, …, ur)T U Rn – вектор управлений; y = (y1, y2, …, ym)T Rn – вектор измеряемых параметров; t – время; A(t), B(t), C(t) – матрицы размер- ности (nn), (nr), (mn) соответственно. Предполагается, что известны начальные состояния x(t0) = x0, где t0 – начальный момент времени.
|
|
|
Если матрицы A(t), B(t), C(t) не зависят от времени t, то система называется стационарной. Далее предполагается, что системы стационарны.
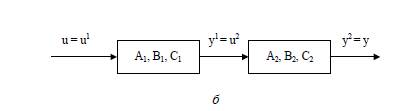
Рассмотрим задачи соединения двух подсистем в систему. При соединении возможны три варианта (рис. 4.4): параллельное (а), последовательное (б) и в обратной связи (в). Предполагается, что обе системы описываются в пространстве состояний соотношениями 1;
1 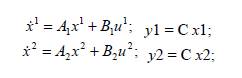
где x1, u1, y1 – векторы состояний, управлений, выходов первой системы, x2, u2, y2 – второй. Необходимо по известным матрицам A1, B1, C1, A2, B2, C2 получить матрицы A, B, C (рис. 4.4, г).

Параллельное соединение. Уравнения системы, с учетом особенностей соединения, указанных на рис. 4.4, а, записываются как

отсюда
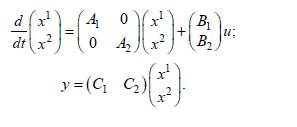
Окончательно матрицы соединения имеют вид –

Последовательное соединение –
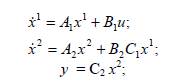
в матричном виде –

окончательно имеем

Обратная связь –
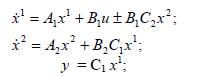
в матричном виде –
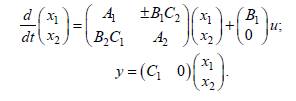
Следовательно,

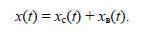
Для линейных систем легко показать справедливость следующего результата, называемого принципом суперпозиции: эффект, вызываемый суммой нескольких воздействий, равен сумме нескольких воздействий, равен сумме эффектов от нескольких воздействий в отдельности. Закон изменения вектора состояний линейной системы представляется в виде суммы свободного и вынужденного колебания
|
|
|
Свободное движение xc(t) происходит при отсутствии внешнего воздействия в ненулевых начальных условиях [4]. Оно определяется решением однородной системы уравнений, соответствующей исходному уравнению состояний  с начальными условиями x(t0) = x0.
с начальными условиями x(t0) = x0.
Вынужденное движение xв(t) – это реакция системы на внешнее воздействие u(t) при нулевых начальных условиях. Оно определяется решением неоднородного уравнения при нулевых начальных условиях.
Для многомерных нестационарных систем, описываемых соотношениями, поведение векторов состояния и выхода определяется по формулам
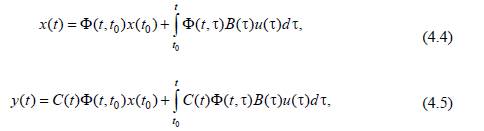
где Ф(t,) – переходная матрица, или матрица Коши, являющаяся решением уравнения

с начальным условием Ф(, ) = Е.
Первые слагаемые в (4.4), (4.5) описывают свободное движение, а вторые – вынужденное.
Для многомерных стационарных систем, описываемых уравнениями (4.3), законы изменения вектора состояния и вектора выхода находятся по формулам
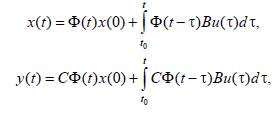
где  Ф(t – тау) – переходная матрица стационарной системы, зависящая от разности
Ф(t – тау) – переходная матрица стационарной системы, зависящая от разности  t –тау. В данном случае решение уравнения (4.3) имеет вид
t –тау. В данном случае решение уравнения (4.3) имеет вид
|
|
|

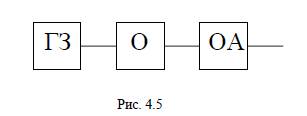
Для проектирования структурных схем СУ удобно применять также аппарат теории систем массового обслуживания. Системы массового обслуживания (СМО) – системы, назначением которых является обслуживание поступающих в систему заявок.
В СМО различают: статические объекты – обслуживающие аппараты (ресурсы или каналы), которые моделируют средства обработки информации, например, ЭВМ, аппаратура передачи данных, аппаратные и программные средства; динамические объекты – транзакты или заявки, которые моделируют решаемые в системе задачи. Если с помощью СМО моделируются производственные линии, то технологическое оборудование отображается в виде обслуживающего аппарата (ОА), а обрабатываемые детали отображаются в виде заявок.
Схема простейшей СМО приведена на рис. 4.5 [6], где ГЗ – генератор заявок, О – очередь, ОА – обслуживающий аппарат.
Задача анализа СМО формируется как определение выходных параметров системы при заданных внутренних (ОА) и внешних (заявок) параметрах.
Выходными параметрами системы могут быть производительность, быстродействие, среднее и максимальное время обслуживания заявок и т. д.
Основные типы СМО:
- в зависимости от числа ОА параллельно обрабатывающих входной поток заявок: одноканальные, многоканальные;
- от числа последовательно включенных ОА: однофазные, многофазные; замкнутая СМО – с циркуляцией постоянного числа заявок внутри системы;
- сеть СМО – структуры из ОА, соединенные произвольным образом.
Состояние СМО характеризуется вектором фазовых переменных её элементов. Функционирование СМО представляется как процесс прохождения заявок через систему. При этом заявка может войти в некоторый ОА для обслуживания. Состояние ОА представлено двоичной величиной W = {«свободен», «занят»} и r – длиной очереди заявки на входе ОА (множество целых чисел). Состояние ОА характеризуется множеством U = {«обслуживание», «ожидание»}
Правило, по которому заявки поступают из очереди на обслуживание, называется дисциплиной обслуживания. Приоритет – величина, выражающая преимущественное право на обслуживание. Если все заявки имеют равные приоритеты, то дисциплина обслуживания бесприоритетная. Часто используют бесприоритетную дисциплину обслуживания FIFO – «первым пришел – первым обслужен». Применяется также дисциплина LIFO, по которой заявки выбираются из конца очереди. Возможны дисциплины со случайным выбором заявок из очереди.
На входе ОА для каждого приоритета своя очередь. Заявки из одной очереди обслуживаются по FIFO. Заявки из более приоритетной очереди обслуживаются раньше заявок с низким приоритетом.
Различают приоритеты: абсолютный – поступая на вход занятого ОА прерывает обслуживание заявки с более низким приоритетом; относительный – прерывание начатого обслуживания не происходит; динамический – может меняться в процессе обработки заявки в системе.
В общем случае обслуживание заявки ОА характеризуется промежутком времени, необходимым для обслуживания, и является случайной величиной с некоторым законом распределения. Чаще всего используются экспоненциальное и нормальное распределения. Математическое ожидание этого закона – среднее время обслуживания заявки.
Для получения математических моделей объектов в виде моделей СМО нет формализованных методов. Разработанная проектировщиком модель, как правило, описывается на языке моделирования, который имеет ту или иную специализацию и отражает определенные концепции моделирования.
Существуют два типа моделей СМО: аналитические и имитационные модели СМО.
Аналитические модели СМО – совокупность явных зависимостей Y от X и Q. Вектор X составляют параметры ОА. Вектор Q – параметры входных потоков заявок. Допускают, что время обслуживания заявок и интервал времени между соседними заявками распределены по экспоненциальному закону
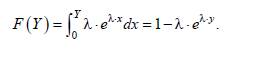
Большинство практических задач не удается решать в должном объеме на основе аналитических моделей.
Имитационные модели СМО – воспроизводят обслуживание в системе множества заявок при заданных статистических сведениях о входных потоках и ресурсах СМО. Имитационная модель СМО состоит из моделей элементов, в качестве которых фигурируют: источники входного потока заявок – алгоритм, по которому вычисляются моменты поступления заявок; устройства – алгоритм выработки значений интервалов обслуживания; память – алгоритм определения объема памяти, требующегося для обслуживания заявки; узел – отображает маршрут движения заявки, связи между элементами модели. Следовательно, имитационная модель СМО представляет собой алгоритм, состоящий из упорядоченных обращений к моделям элементов (источников, устройств, памятей, узлов).
Таким образом, в зависимости от целей функционального проектирования при рассмотрении СУ на самом верхнем уровне абстракции (первом) возможны различные описания систем управления и их структурных схем в соответствии с выбранным математическим аппаратом.
Дата добавления: 2019-11-25; просмотров: 462; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!