Математическая модель электрогидроусилителя
С механической обратной связью
Построение математической модели рассмотрим на примере электрогидравлического усилителя, схема которого приведена на рис. 5.1. Электрогидравлический усилитель (ЭГУ) состоит из электромеханического преобразователя (ЭМП) и гидравлического усилителя (ГУ) и распределителя (Р) рабочей жидкости.
ЭГУ снабжен обратной связью от золотника 1 к заслонке 3, расположенной между соплами 4. Обратная связь выполнена в виде тонкого упругого стержня 2 (рис. 5.1). Заслонка запрессована в гибкую упругую трубку 5 и ее верхний конец жестко соединен с якорем ЭМП 6, который размещен между полюсами постоянных магнитов 7. При подаче электрического тока в обмотки 8 управления к якорю будет приложен момент электромагнитных сил, возникающих вследствие взаимодействия электромагнитного поля с полем, созданным постоянными магнитами. Этот момент поворачивает якорь вместе с заслонкой относительно точки, находящейся приблизительно посередине упругой трубки.
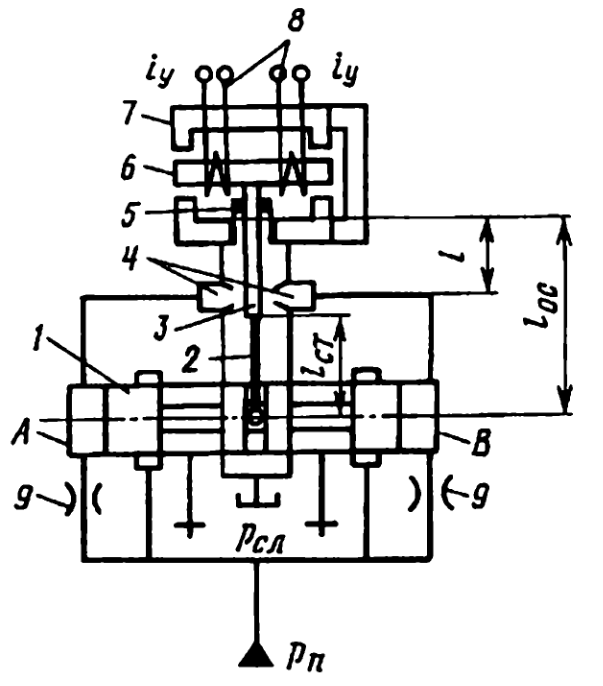
Рис. .1. Схема ЭГУ с механической обратной связью
При отклонении заслонки от среднего положения зазор между одним соплом и заслонкой уменьшается, а между другим соплом и заслонкой увеличивается. Уменьшение зазора между одним соплом и заслонкой ведет к увеличению сопротивления кольцевой щели (между соплом и заслонкой), что в свою очередь приводит к уменьшению расхода через это сопло и увеличению давлению перед ним и в камере А. Увеличение зазора между другим соплом и заслонкой ведет к уменьшению сопротивления кольцевой щели (между соплом и заслонкой), что в свою очередь приводит к увеличению расхода через это сопло и уменьшению давлению перед ним и в камере B. Разность давлений в камерах А и B, создает силу, перемещающую золотник в направлении его оси. Вместе с золотником перемещается нижний конец упругого стержня, при изгибе которого к заслонке прикладывается момент, уравновешивающий после определенного смещения золотника электромагнитный момент, приложенный к верхнему концу заслонки. В результате наступает равновесие элементов ЭГУ, при котором проходящему через обмотки управления электрическому току соответствует требуемое смещение золотника от среднего положения.
|
|
|
Описание динамики электрогидравлического усилителя, выполним с учетом массы золотника, сжимаемости жидкости, но пренебрегая сопротивлением гидролиний.
Математическое описание начнём с процессов, происходящих в электромеханическом преобразователе. Уравнение вращения якоря вместе с заслонкой запишем в виде
 , (5.1)
, (5.1)
где Мя – момент электромагнитных сил, поворачивающих якорь; Мс – момент сопротивления, обусловленный силами трения и электромагнитными силами сопротивления, вызванными встречной ЭДС в обмотке управления электромеханического преобразователя (ЭМП); Мн – момент сил, действующих на заслонку и упругий стержень, и создающих нагрузку на якорь, эти силы возникают вследствие изгиба упругого стержня механической обратной связи при смещении золотника и отклонении заслонки от среднего положения, и вследствие гидродинамического воздействия на заслонку жидкости, вытекающей через сопла; Jя – момент инерции якоря вместе с заслонкой; φя – угол отклонения якоря от среднего положения.
|
|
|
Внешнюю моментную характеристику электромеханического преобразователя будем использовать в виде линейной зависимости момента Мя, развиваемого якорем от тока управления iУ и угла φя поворота якоря:
 , (5.2)
, (5.2)
где  и
и  – коэффициенты внешней моментной характеристики ЭМП.
– коэффициенты внешней моментной характеристики ЭМП.
Момент сопротивления Мс, возникающий при вращении якоря, будем определять по формуле
 , (5.3)
, (5.3)
где Кс – коэффициент сопротивления, обычно определяется экспериментально.
|
|
|
Так как заслонка жестко связана с якорем и имеет возможность поворачиваться вокруг оси совместно с ним, то гидродинамическую силу, приложенную к заслонке, нужно учесть при составлении уравнения вращения якоря.
Момент Мн сил, создающих нагрузку на якорьопределяется соотношением
 , (5.4)
, (5.4)
где  – гидродинамическая сила, действующую на заслонку со стороны струй жидкости истекающих из сопел; l – расстояние от центра вращения якоря вместе с заслонкой до оси сопел;
– гидродинамическая сила, действующую на заслонку со стороны струй жидкости истекающих из сопел; l – расстояние от центра вращения якоря вместе с заслонкой до оси сопел;  – сила, действующая на золотник, и возникающая вследствие изгиба упругого стержня механической обратной связи при смещении золотника и отклонении заслонки от среднего положения, с такой же по величине силой, но в противоположном направлении, действует золотник на упругий стержень, поэтому в формуле используется знак минус;
– сила, действующая на золотник, и возникающая вследствие изгиба упругого стержня механической обратной связи при смещении золотника и отклонении заслонки от среднего положения, с такой же по величине силой, но в противоположном направлении, действует золотник на упругий стержень, поэтому в формуле используется знак минус;  – расстояние от центра вращения якоря вместе с заслонкой до оси золотника.
– расстояние от центра вращения якоря вместе с заслонкой до оси золотника.
Гидродинамическую силу, действующую на заслонку со стороны струй рабочей жидкости истекающих из сопел, можно определить по формуле
 , (5.5)
, (5.5)
где χс – коэффициент, равный 1,03–1,06 для сопел с острыми кромками;  – площадь проходного сечения сопла (здесь dс – диаметр сопла);
– площадь проходного сечения сопла (здесь dс – диаметр сопла);  – давление на входе в левое сопло (одинаково с давлением в полости А);
– давление на входе в левое сопло (одинаково с давлением в полости А);  – давление на входе в правое сопло (одинаково с давлением в полости Б).
– давление на входе в правое сопло (одинаково с давлением в полости Б).
|
|
|
Силу , действующую на золотник можно определить по формуле
 , (5.6)
, (5.6)
где  – модуль упругости материала, которого изготовлен стержень;
– модуль упругости материала, которого изготовлен стержень;  – момент инерции сечения стержня;
– момент инерции сечения стержня;  – длина стержня; – давление на входе в правое сопло (одинаково с давлением в полости Б).
– длина стержня; – давление на входе в правое сопло (одинаково с давлением в полости Б).
После подстановки моментов из формул (5.2)–(5.4) в уравнение (5.2) с учетом соотношения (5.5) получим
 . (5.7)
. (5.7)
Уравнение (5.7) описывает процессы, происходящие в ЭМП.
Теперь составим математическое описание гидроусилителя. При отклонении заслонки влево уравнения баланса расходов для левой и правой половы гидроусилителя можно записать в виде
 , (5.8)
, (5.8)
 . (5.9)
. (5.9)
где  – расход жидкости, поступающий в полость А гидроусилителя;
– расход жидкости, поступающий в полость А гидроусилителя;  – расход жидкости, протекающий через левый дроссель;
– расход жидкости, протекающий через левый дроссель;  – расход жидкости, вытекающей из левого сопла;
– расход жидкости, вытекающей из левого сопла;  – расход жидкости, поступающий в полость Б гидроусилителя;
– расход жидкости, поступающий в полость Б гидроусилителя;  – расход жидкости, вытекающей из правого сопла;
– расход жидкости, вытекающей из правого сопла;  – расход жидкости, протекающий через правый дроссель.
– расход жидкости, протекающий через правый дроссель.
Расходы и жидкости определяются зависимостями
 , (5.10)
, (5.10)
 , (5.11)
, (5.11)
где  – коэффициент расход канала дросселя;
– коэффициент расход канала дросселя;  – площадь поперечного сечения канала дросселя;
– площадь поперечного сечения канала дросселя;  – давление питания гидравлического усилителя;
– давление питания гидравлического усилителя;  – давление управления в полость А гидроусилителя;
– давление управления в полость А гидроусилителя;  – давление управления в полость Б гидроусилителя; ρ – плотность жидкости.
– давление управления в полость Б гидроусилителя; ρ – плотность жидкости.
Расходы и  жидкости определяются зависимостями
жидкости определяются зависимостями
 , (5.12)
, (5.12)
 , (5.13)
, (5.13)
где  – коэффициент расхода сопла-заслонки;
– коэффициент расхода сопла-заслонки;  – площадь кольцевой щели между торцом левого сопла и заслонкой;
– площадь кольцевой щели между торцом левого сопла и заслонкой;  – площадь кольцевой щели между торцом правого сопла и заслонкой;
– площадь кольцевой щели между торцом правого сопла и заслонкой;  – давление в полости слива, в которую вытекает жидкость из сопла.
– давление в полости слива, в которую вытекает жидкость из сопла.
Площади и определяются соотношениями
 , (5.14)
, (5.14)
 . (5.15)
. (5.15)
где  – диаметр проходного сечения сопла;
– диаметр проходного сечения сопла;  – зазор между торцом левого сопла и заслонкой;
– зазор между торцом левого сопла и заслонкой;  – зазор между торцом правого сопла и заслонкой.
– зазор между торцом правого сопла и заслонкой.
Зазоры и между заслонкой и соплами определяются зависимостями
 , (5.16)
, (5.16)
 , (5.17)
, (5.17)
где  – зазор между торцом сопла (левого и правого) и заслонкой в нейтральном положении;
– зазор между торцом сопла (левого и правого) и заслонкой в нейтральном положении;  – отклонение заслонки от нейтрального положения.
– отклонение заслонки от нейтрального положения.
Отклонение заслонки hу от нейтрального положения связано с углом φя поворота якоря соотношением
 . (5.18)
. (5.18)
После подстановки площадей и из формул (5.14) и (5.15) в уравнения (5.12) и (5.13) с учетом соотношений (5.16), (5.17) и (5.18) получим
 , (5.19)
, (5.19)
 , (5.20)
, (5.20)
Расходы  и
и  связаны с перемещением золотника:
связаны с перемещением золотника:
 , (5.21)
, (5.21)
 , (5.22)
, (5.22)
где  – площадь торца золотника; dз – диаметр золотника; xз – перемещение золотника; Vу0 – объем каждой из полостей А и Б при положении заслонки в нейтральном положении; Bж – модуль объемной упругости жидкости. Второе слагаемое в правой части уравнений (5.21) и (5.22) учитывает изменение объема жидкости, обусловленное её сжимаемостью.
– площадь торца золотника; dз – диаметр золотника; xз – перемещение золотника; Vу0 – объем каждой из полостей А и Б при положении заслонки в нейтральном положении; Bж – модуль объемной упругости жидкости. Второе слагаемое в правой части уравнений (5.21) и (5.22) учитывает изменение объема жидкости, обусловленное её сжимаемостью.
Уравнение движения золотника под действием разности  давлений в полостях А и Б можно записать в виде
давлений в полостях А и Б можно записать в виде
 , (5.23)
, (5.23)
где Fгд2 – гидродинамическая сила, действующая на золотник со стороны жидкости, протекающей через распределитель; Fтр – сила трения; Fпр – сила, действующая на золотника со стороны упругого стержня механической обратной связи; mз – масса золотника.
Зависимость гидродинамической силы Fгд2 от перемещения золотника  будем считать линейной, и определять по формуле
будем считать линейной, и определять по формуле
 , (5.24)
, (5.24)
где  – коэффициент жесткости гидродинамической пружины (гидродинамическая сила имеет линейную зависимость аналогично силе пружины отсюда и название коэффициента).
– коэффициент жесткости гидродинамической пружины (гидродинамическая сила имеет линейную зависимость аналогично силе пружины отсюда и название коэффициента).
Силу трения будем считать вызванной жидкостным трением, и определять по формуле
 , (5.25)
, (5.25)
где kтр – коэффициент трения.
После подстановки сил из формул (5.24)-(5.25) в уравнение (5.23) получим:
 , (5.26)
, (5.26)
Система уравнений (5.7)-(5.11), (5.19)-(5.22) и (5.26) с учетом соотношений (5.12)-(5.18) описывает процессы, протекающие в электрогидравлическом усилителе.
При исследовании процессов, протекающих в системах, с помощью ЭВМ и пакетов прикладных программ, основанные на численных методах математическое описание удобнее выполнять в переменных состояния и системы уравнений приводить к дифференциальным уравнениям первого порядка, записанным в форме Коши.
В качестве переменных состояния будем использовать искомые функции: угол jя(t) поворота якоря, угловая скорость ωя(t) вращения якоря, давления pу1(t) и pу2(t) управления соответственно в полости А и Б, перемещение xз(t) и скорость υз(t) золотника; а закон изменения тока iу(t) управления известен.
Дифференциальное уравнение (5.7) второго порядка заменим системой двух уравнений первого порядка
 , (5.27)
, (5.27)
 . (5.28)
. (5.28)
где ωя – угловая скорость вращения якоря.
Для исключения расходов  и
и  подставим выражение расхода из уравнения (5.8) в уравнение (5.21), а выражение расхода из уравнения (5.9) в уравнение (5.22) в результате получим
подставим выражение расхода из уравнения (5.8) в уравнение (5.21), а выражение расхода из уравнения (5.9) в уравнение (5.22) в результате получим
 , (5.29)
, (5.29)
 . (5.30)
. (5.30)
где  – скорость перемещения золотника.
– скорость перемещения золотника.
Дифференциальное уравнение (5.26) второго порядка также заменим системой двух уравнений первого порядка
, (5.31)
 , (5.32)
, (5.32)
Полученную систему уравнение (5.27)- (5.32) приведем к форме Коши:
 . (5.33)
. (5.33)
где функции  ,
,  ,
,  ,
,  определяются формулами (5.10), (5.11), (5.19), (5.20).
определяются формулами (5.10), (5.11), (5.19), (5.20).
Для решения системы уравнений (5.33) необходимо знать закон изменения тока управления  , задать значение коэффициентов:
, задать значение коэффициентов:  ,
,  ,
,  ,
,  ,
,  ,
,  ; параметров:
; параметров:  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ; начальные условия (значения искомых функций в начальный момент времени):
; начальные условия (значения искомых функций в начальный момент времени):
 .
.
Пример расчета в Mathcad математической модели электрогидравлического усилителя приведен на рис. 5.2-5.14.
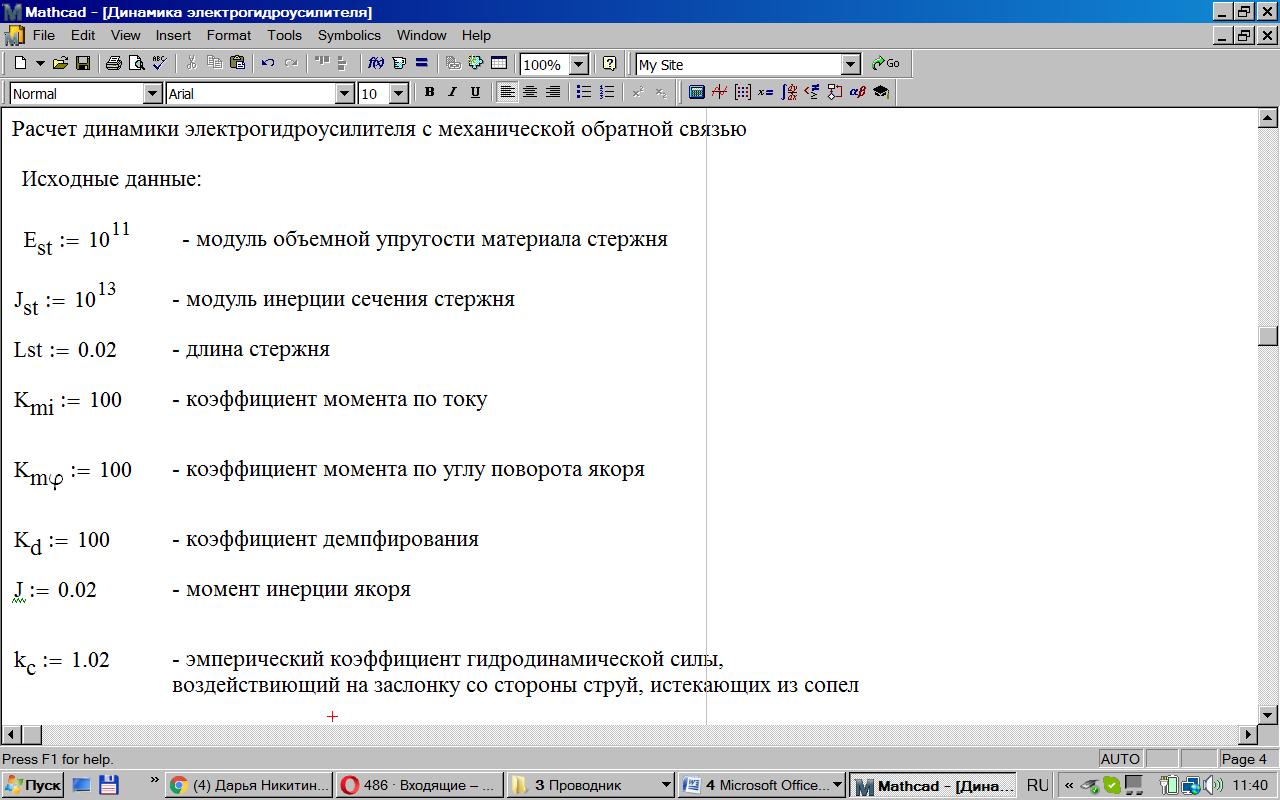
Рис. 5.2
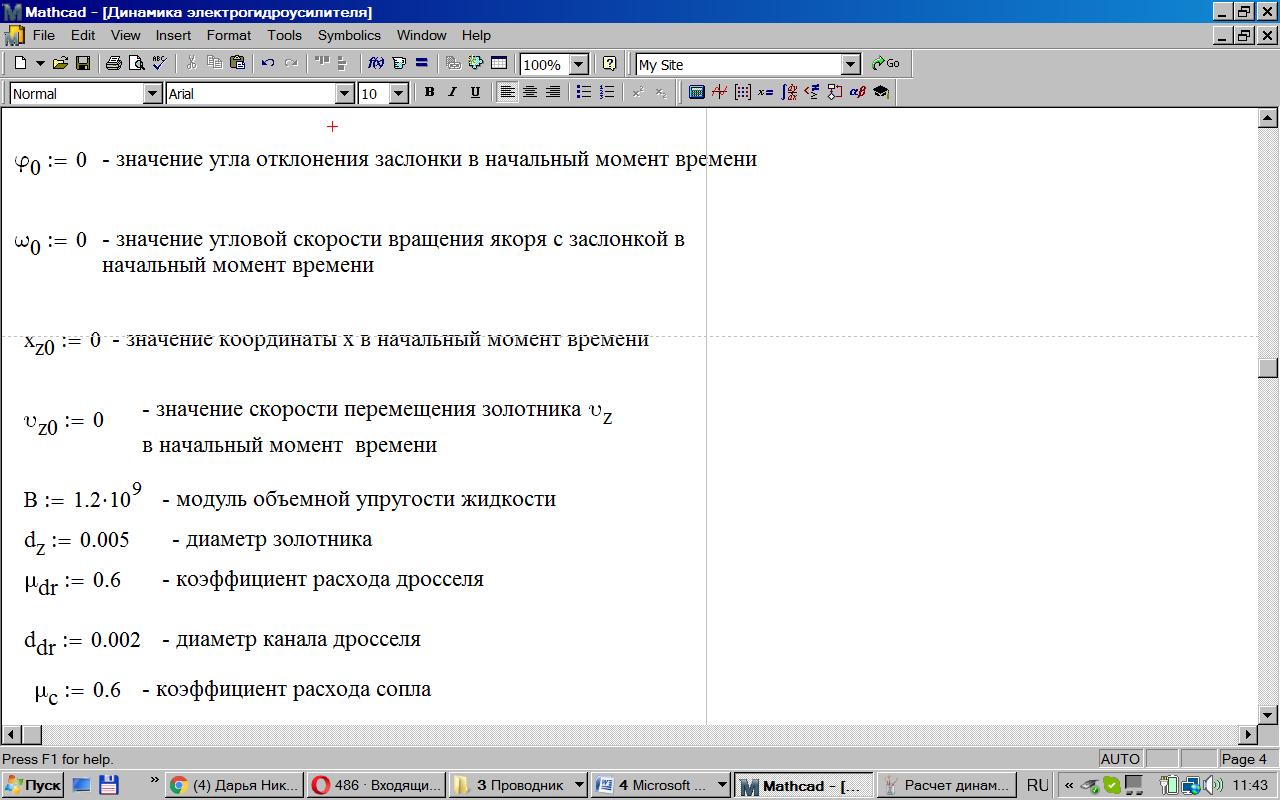
Рис. 5.3
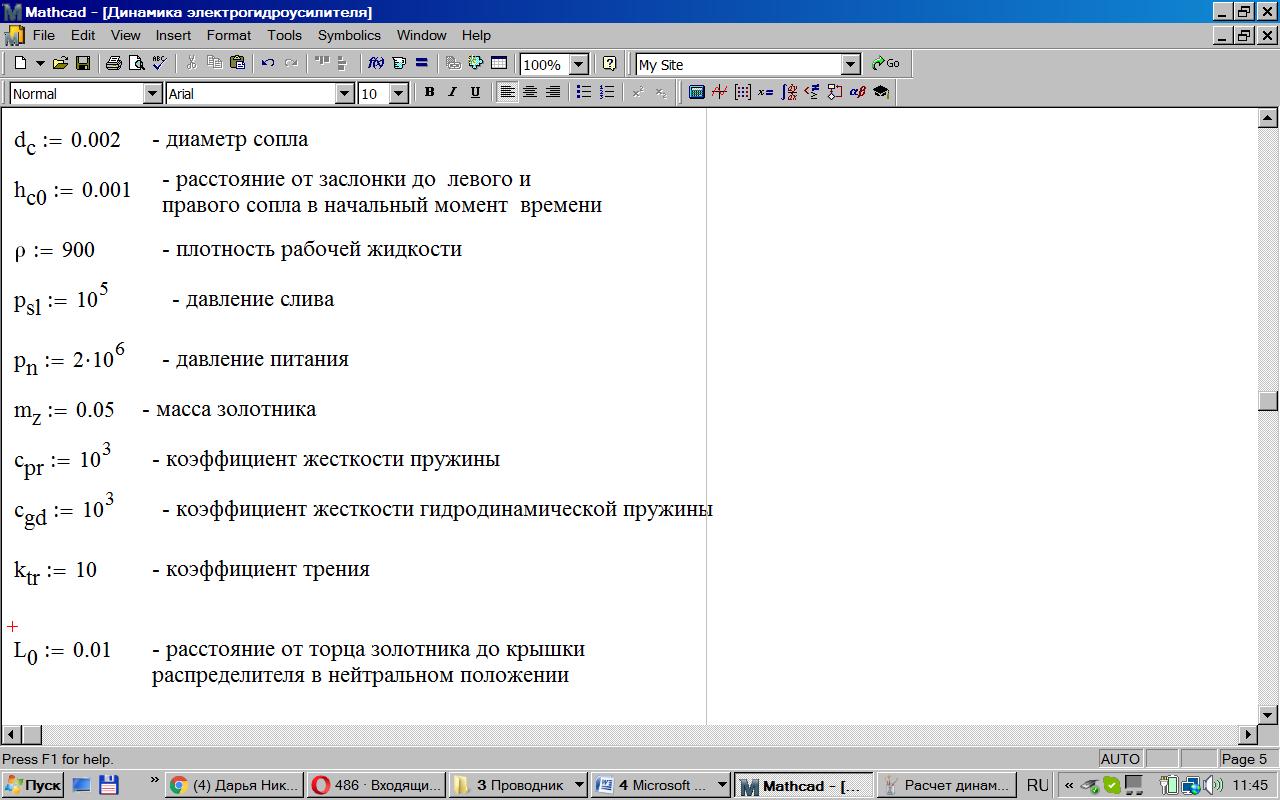
Рис. 5.4
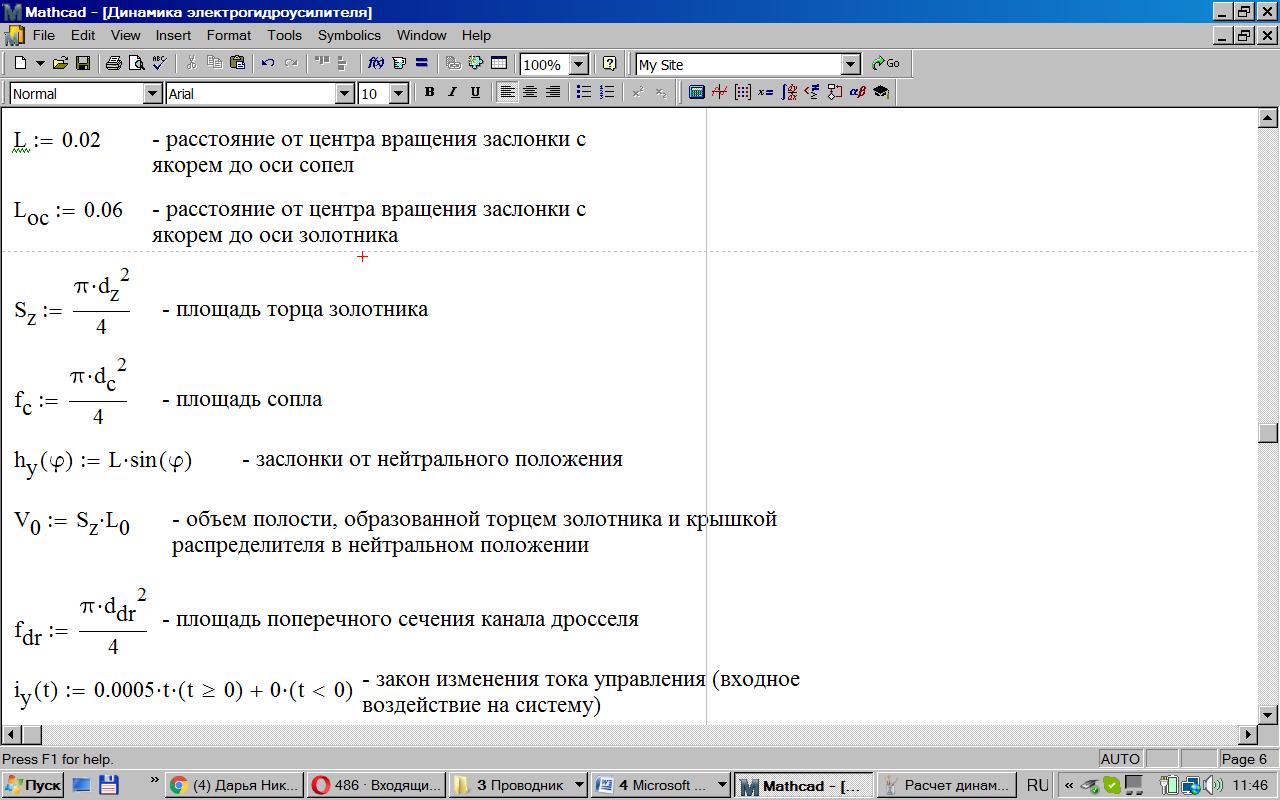
Рис. 5.5
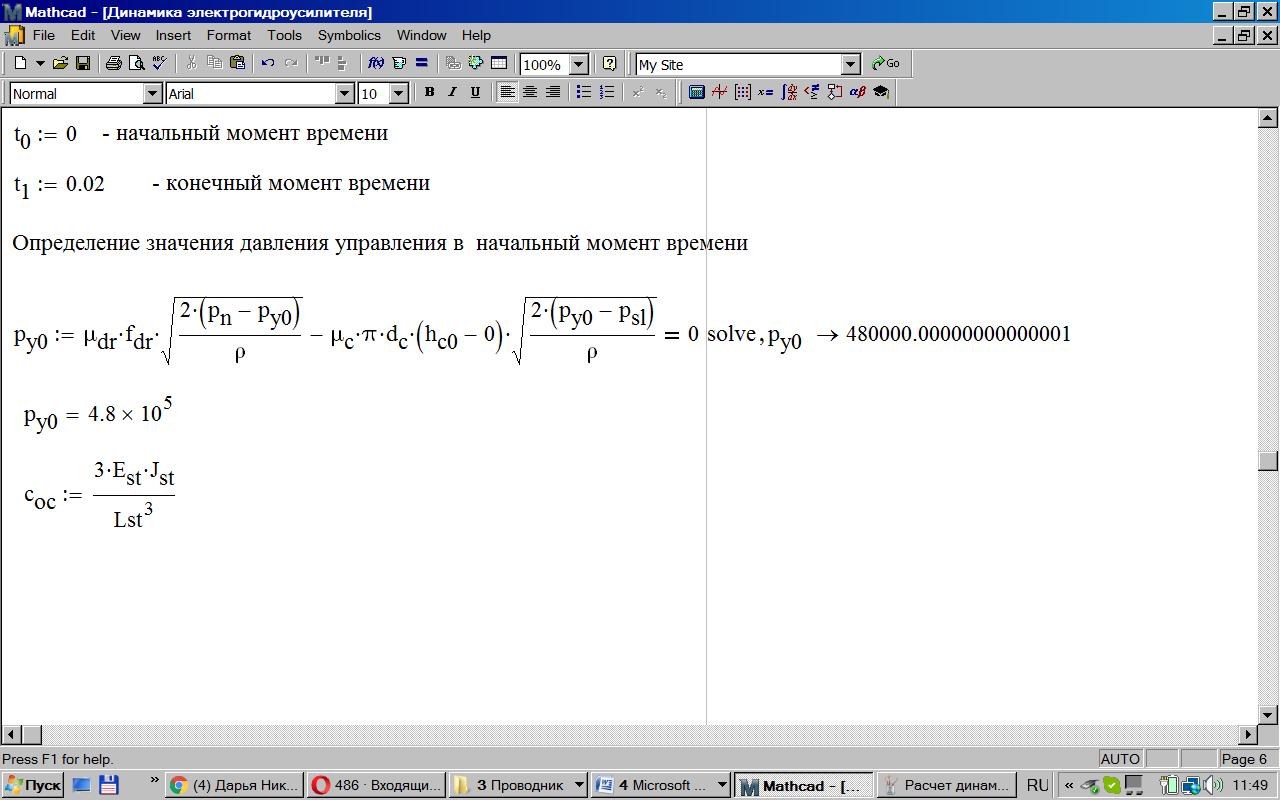
Рис. 5.6
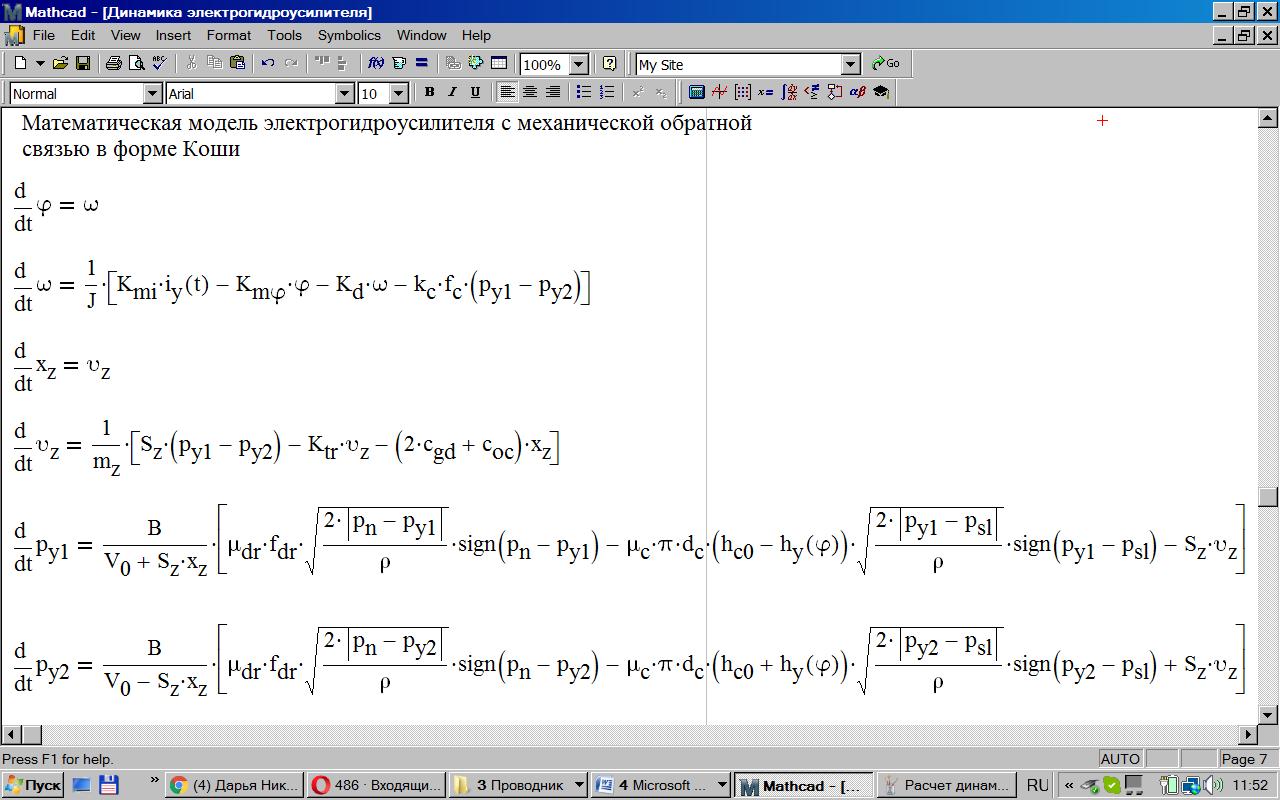
Рис. 5.7
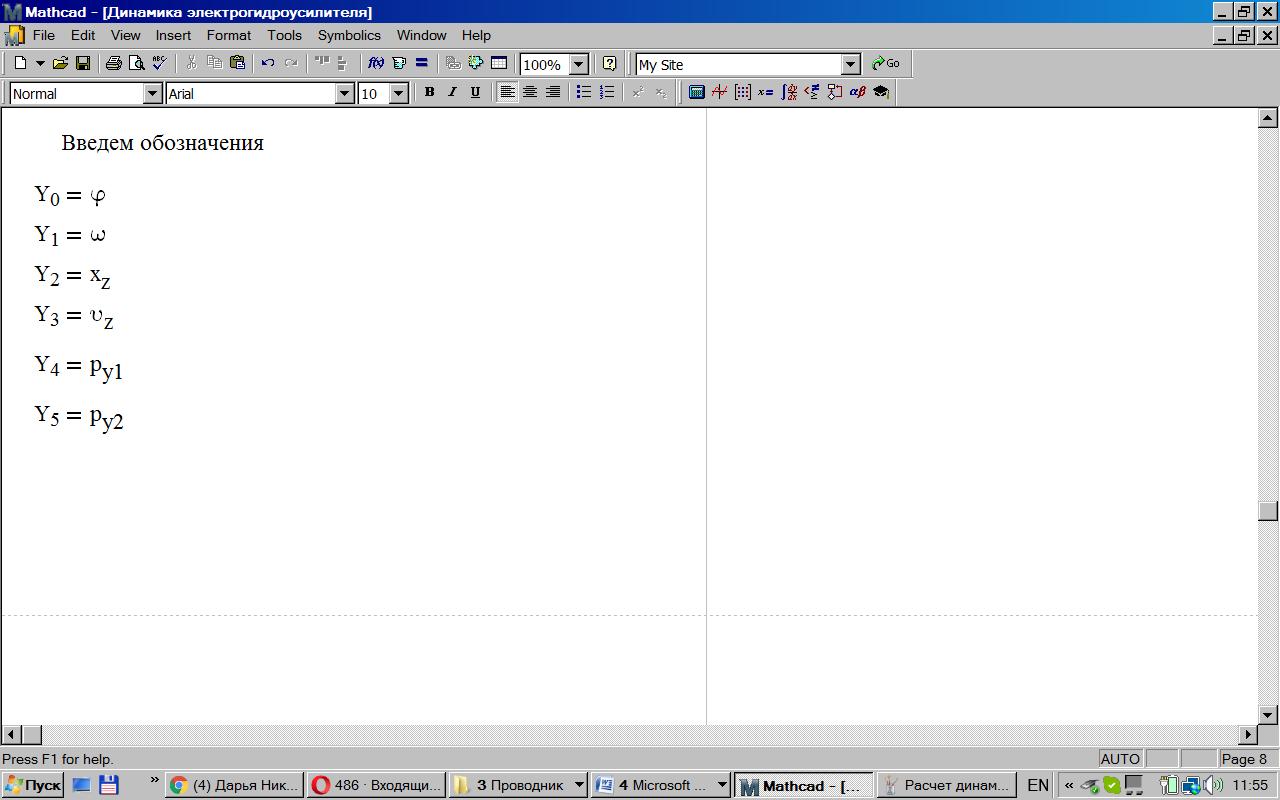
Рис. 5.8
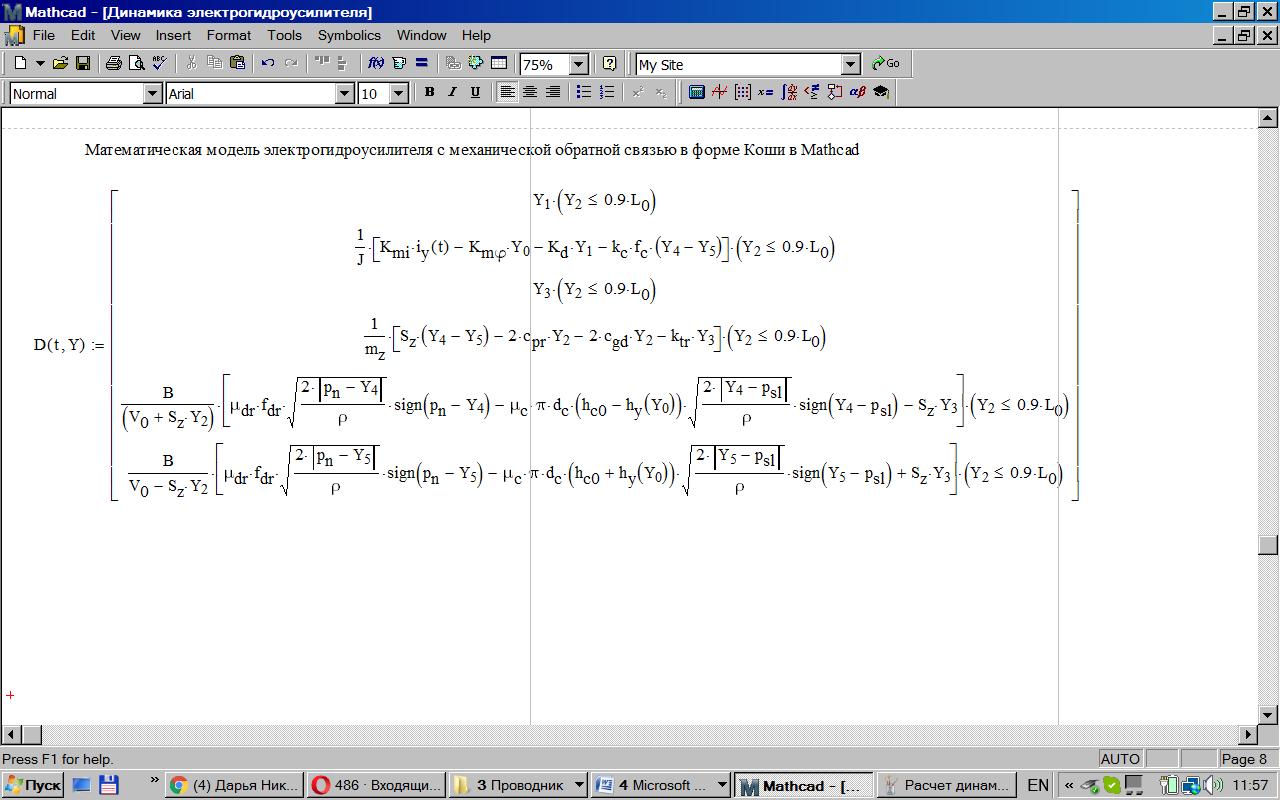
Рис. 5.9
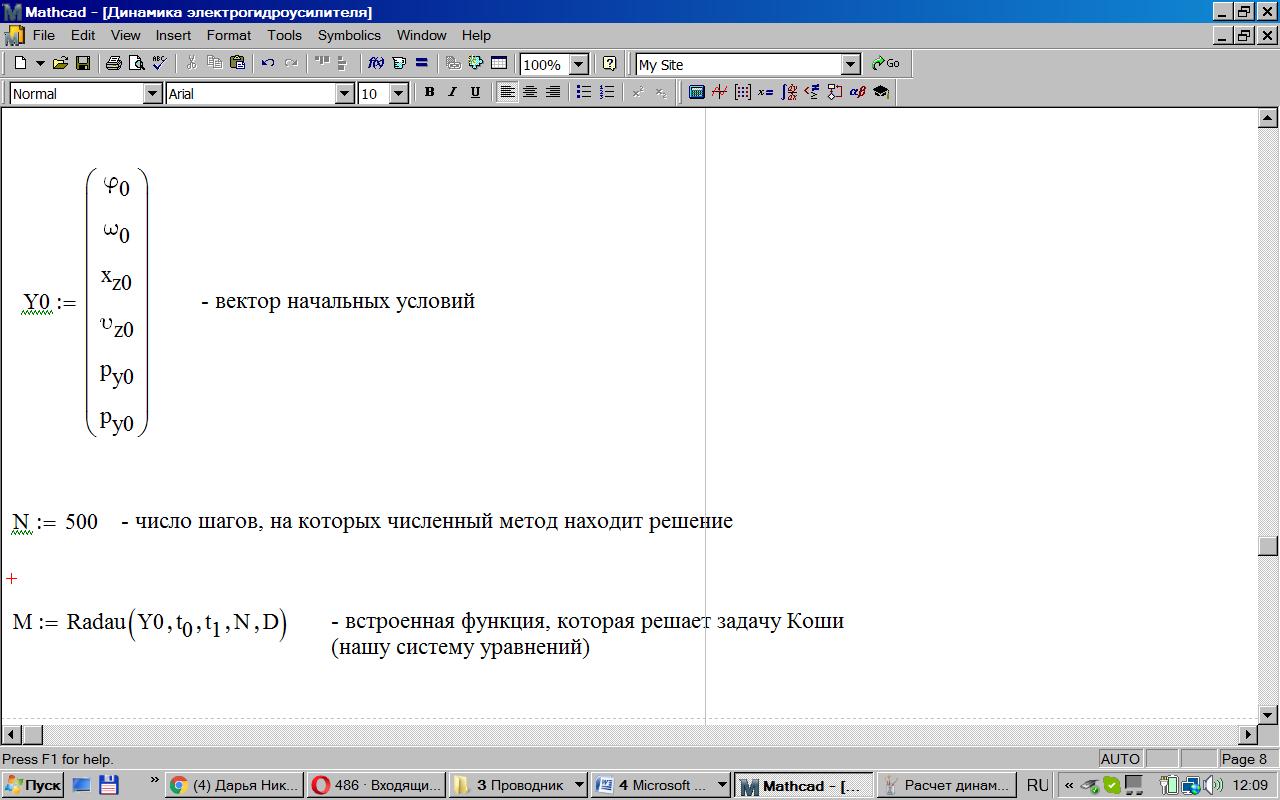
Рис. 5.10
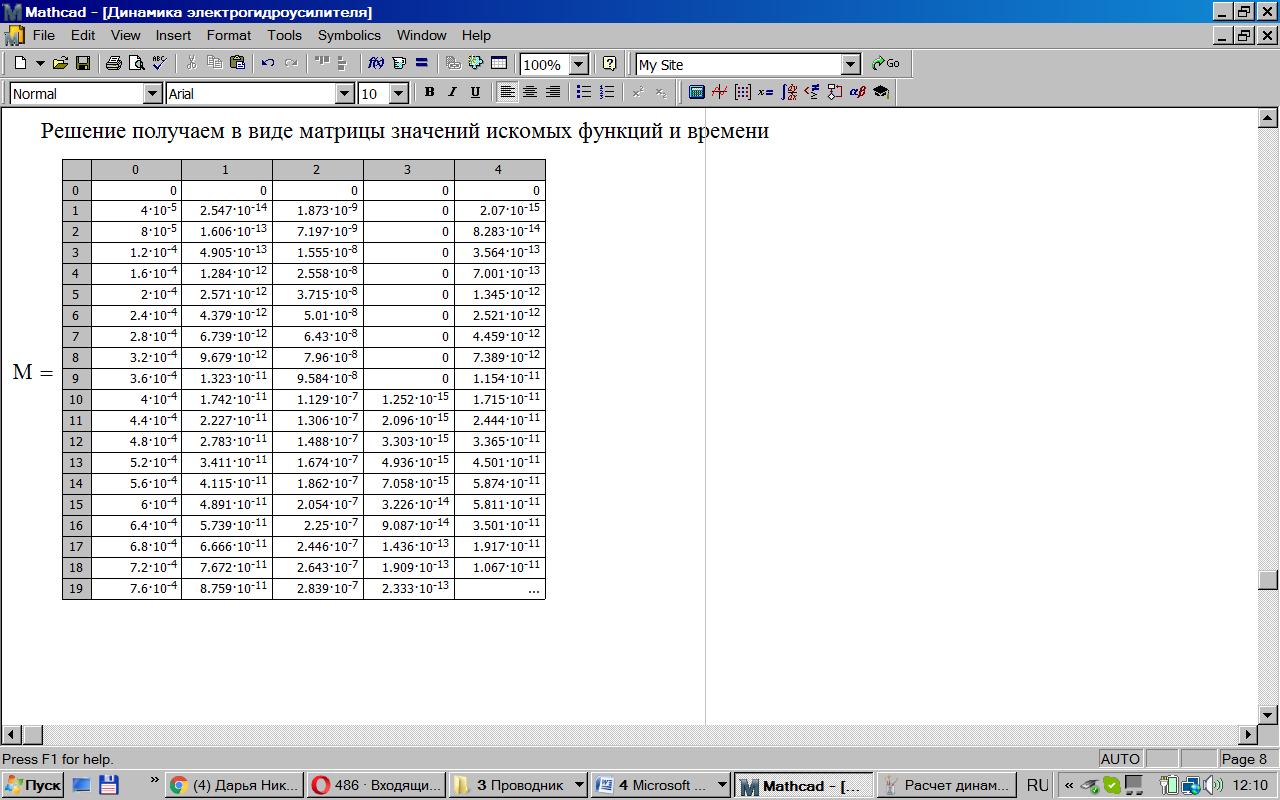
Рис. 5.11
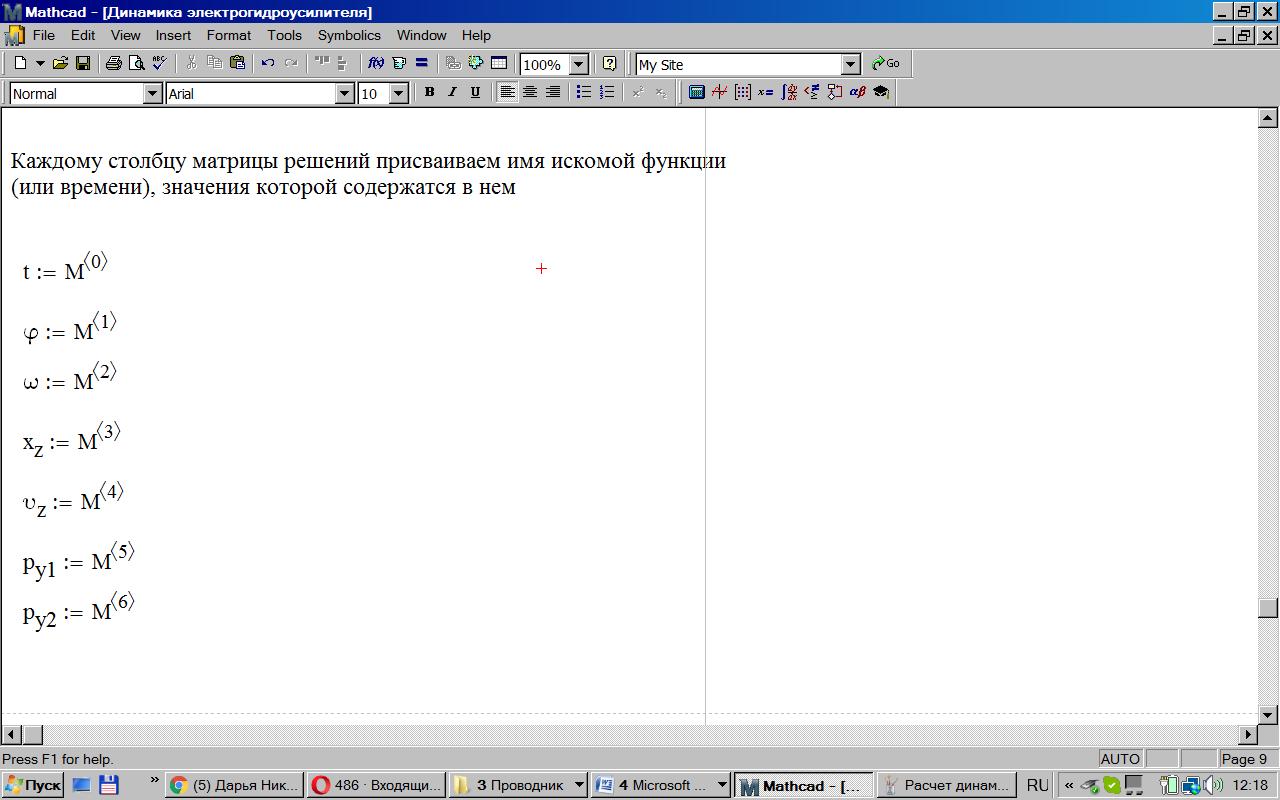
Рис. 5.12

Рис. 5.13
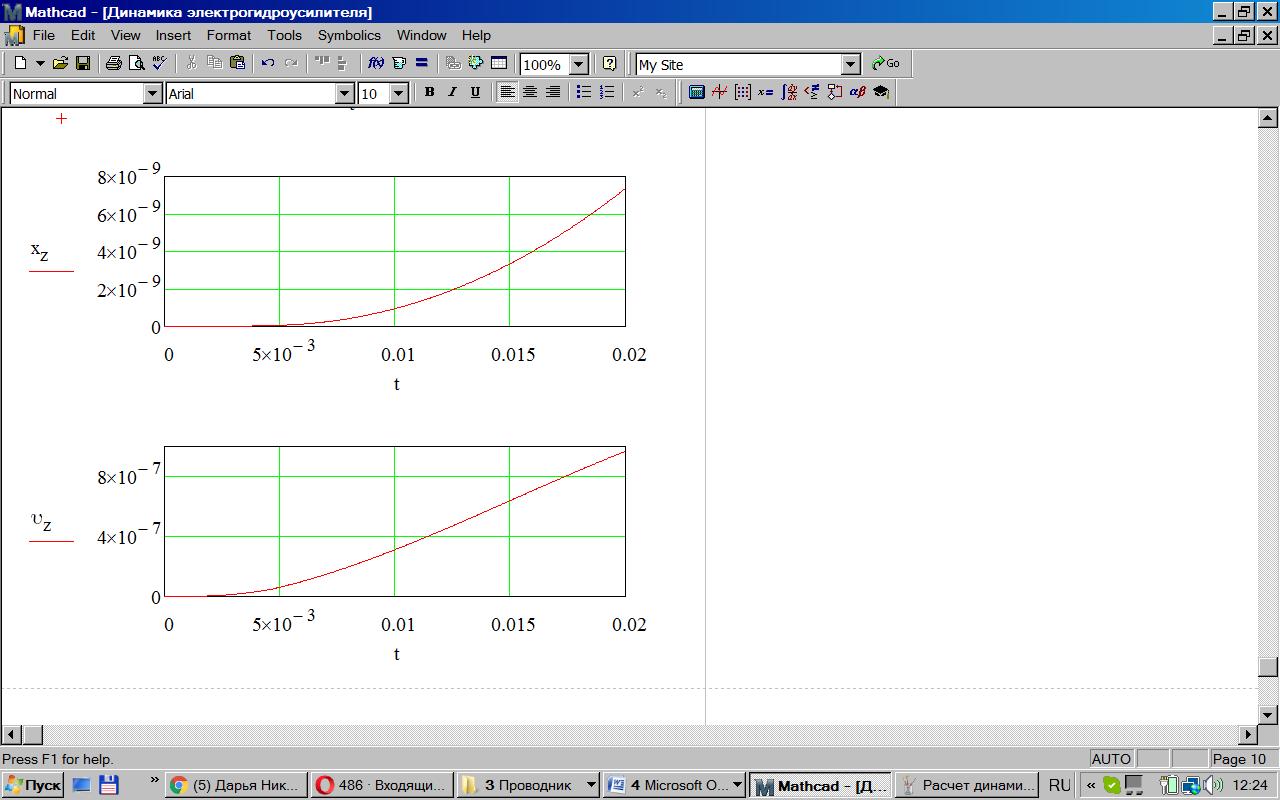
Рис. 5.14
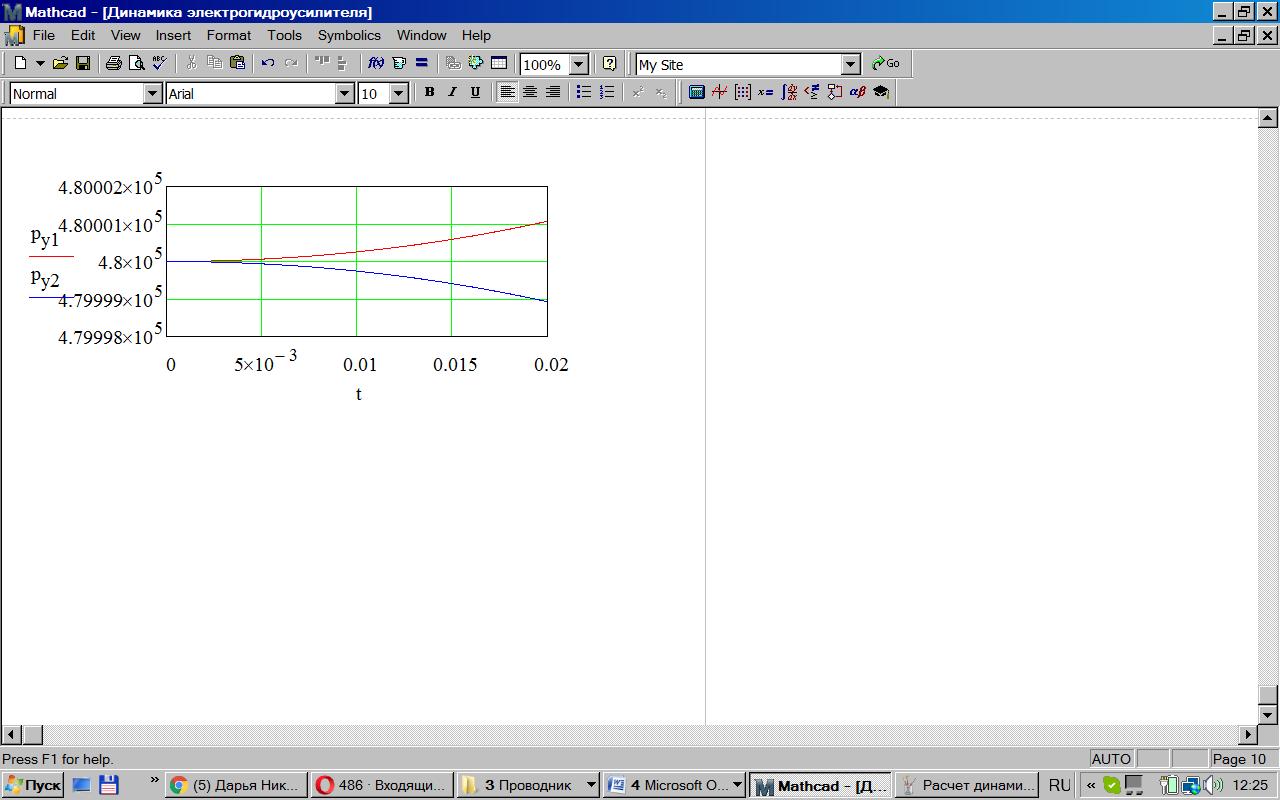
Рис. 5.15
Дата добавления: 2019-09-13; просмотров: 661; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!