Приложение 1. Варианты математических моделей судов
Таблица П1.1.
| Параметр | Обозначение | Вариант судна | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
| Скорость хода |  , м/сек , м/сек
| 2.57 | 2.57 | 5.65 | 6.17 | 3.6 | 5.14 | 16.96 | 3.6 |
| Длина по ватерлинии |  , м , м
| 99.6 | 99.6 | 51 | 39 | 36 | 75.6 | 115 | 32 |
| Коэффициенты математической модели | 
| -0.58 | -0.58 | -0.59 | -0.69 | -0.46 | -0.59 | -0.63 | -0.46 |

| 6.16 | 4.19 | 5.32 | 6.14 | 3.04 | 5.44 | 8.25 | 3.04 | |

| 0.80 | 0.43 | 0.94 | 1.22 | 0.77 | 0.73 | 1.08 | 0.77 | |

| -7.23 | -3.58 | -2.41 | -3.12 | -0.8 | -7.26 | -6.35 | -0.8 | |

| -0.34 | -0.34 | -0.29 | -0.44 | -0.18 | -0.53 | -0.14 | -0.18 | |

| -3.5 | -3.5 | -3.4 | -3.1 | -1.52 | -5.72 | -21.16 | -1.52 | |
Приложение 2. Стандартные характеристические полиномы.
Общая форма полиномов (нормирование по базовой частоте  ):
):
О динамических свойствах систем, имеющих рассматриваемые характеристические полиномы, можно судить по переходным характеристикам:
П2.1 Биноминальные полиномы
Коэффициенты

| 
| 
| 
| 
| 
| 
| 
| 
| 
|
| 1 | 1 | 1 | |||||||
| 2 | 1 | 2 | 1 | ||||||
| 3 | 1 | 3 | 3 | 1 | |||||
| 4 | 1 | 4 | 6 | 4 | 1 | ||||
| 5 | 1 | 5 | 10 | 10 | 5 | 1 | |||
| 6 | 1 | 6 | 15 | 20 | 15 | 6 | 1 | ||
| 7 | 1 | 7 | 21 | 35 | 35 | 21 | 7 | 1 | |
| 8 | 1 | 8 | 28 | 56 | 70 | 56 | 28 | 8 | 1 |
|
|
|
П2.2 Полиномы Баттерворта
Коэффициенты
|
| 
|
|
|
|
|
| 
|
|
|
| 1 | 1 | 1 | |||||||
| 2 | 1 | 1.4 | 1 | ||||||
| 3 | 1 | 2 | 2 | 1 | |||||
| 4 | 1 | 2.6 | 3.4 | 2.6 | 1 | ||||
| 5 | 1 | 3.24 | 5.24 | 5.24 | 3.24 | 1 | |||
| 6 | 1 | 3.86 | 7.46 | 9.13 | 7.46 | 3.86 | 1 | ||
| 7 | 1 | 4.5 | 10.1 | 14.6 | 14.6 | 10.1 | 4.5 | 1 | |
| 8 | 1 | 5.12 | 13.14 | 21.84 | 25.69 | 21.84 | 13.14 | 5.12 | 1 |
П2.3 Полиномы минимизирующие функционал 
Коэффициенты
|
|
|
|
|
|
|
|
|
|
|
| 1 | 1 | 1 | |||||||
| 2 | 1 | 1 | 1 | ||||||
| 3 | 1 | 2 | 1 | 1 | |||||
| 4 | 1 | 2 | 3 | 1 | 1 | ||||
| 5 | 1 | 3 | 3 | 4 | 1 | 1 | |||
| 6 | 1 | 3 | 6 | 4 | 5 | 1 | 1 | ||
| 7 | 1 | 4 | 6 | 10 | 5 | 6 | 1 | 1 | |
| 8 | 1 | 4 | 10 | 10 | 15 | 6 | 7 | 1 | 1 |
П2.4 Полиномы минимизирующие функционал 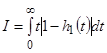
|
|
|
Коэффициенты
|
|
| 
|
|
|
|
|
|
|
|
| 1 | 1 | 1 | |||||||
| 2 | 1 | 1.4 | 1 | ||||||
| 3 | 1 | 2.15 | 1.75 | 1 | |||||
| 4 | 1 | 2.7 | 3.4 | 2.1 | 1 | ||||
| 5 | 1 | 3.4 | 5.5 | 5 | 2.8 | 1 | |||
| 6 | 1 | 3.95 | 7.45 | 8.60 | 6.60 | 3.25 | 1 | ||
| 7 | 1 | 4.58 | 10.64 | 15.54 | 15.08 | 10.42 | 4.475 | 1 | |
| 8 | 1 | 5.15 | 13.3 | 22.20 | 25.75 | 21.60 | 12.80 | 5.20 | 1 |
Приложение 3 . Варианты курсового расчета.
| Вариант задания курсового расчета | Вариант параметров математической модели судна | Косвенный метод решения задачи оптимизации |
| 1 – 8 | 1 – 8 | Минимизация квадратичного функционала |
| 9 – 16 | 1 – 8 | Использование стандартного полинома П2.1 |
| 17 – 24 | 1 – 8 | Использование стандартного полинома П2.2 |
| 25 – 32 | 1 – 8 | Использование стандартного полинома П2.3 |
| 33 – 40 | 1 – 8 | Использование стандартного полинома П2.4 |
|
|
|
Приложение 4. Пример решения задачи управления на основе теоремы об N интервалах.
Требуется перевести объект управления, описываемый системой уравнений (П 4.1) из начальной точки (П 4.2) в конечную точку (П 4.3) за минимальное время.
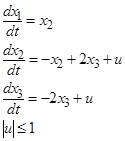 (П 4.1)
(П 4.1)
Граничные условия:
 (П 4.2)
(П 4.2)
 (П 4.3)
(П 4.3)
Для проверки применимости теоремы об N интервалах определим корни характеристического уравнения объекта. (П 4.1)
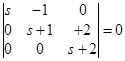 (П 4.4)
(П 4.4)
Характеристическое уравнение (П 4.4) имеет следующие решения (П 4.5)
 (П 4.5)
(П 4.5)
|
|
|
Поскольку характеристическое уравнение рассматриваемого объекта имеет вещественные корни, то к нему применима теорема об N интервалах, из которой следует, что в рассматриваемом случае для перевода объекта управления между заданными точками управляющее воздействие должно быть максимально по модулю и менять знак не более двух раз.
Таким образом, результатом рассматриваемой задачи является набор из трех параметров: первый момент переключения -  , второй момент переключения -
, второй момент переключения -  и момент завершения управления (выключения управления) -
и момент завершения управления (выключения управления) -  . Для определения этих параметров предполагается использовать MATLAB функцию FMINSEARCH. Для успешной работы этой функции необходимо задать начальную точку поиска в пространстве
. Для определения этих параметров предполагается использовать MATLAB функцию FMINSEARCH. Для успешной работы этой функции необходимо задать начальную точку поиска в пространстве  .
.
С целью определение начального приближения решим вспомогательную задачу управления для упрощенного объекта управления. В данном случае возможно отдельное рассмотрение уравнений для  и
и  из (П 4.1), т.к. эти уравнения не зависят от
из (П 4.1), т.к. эти уравнения не зависят от  .
.
Вспомогательная задача заключается в том, чтобы перевести упрощенный объект из состояния 
 в состояние используя два момента переключения. При решении рассматриваемой задачи момент выберем произвольно, а моменты
в состояние используя два момента переключения. При решении рассматриваемой задачи момент выберем произвольно, а моменты  и
и  определим графическим методом на основе построения линии переключения в обратном времени.
определим графическим методом на основе построения линии переключения в обратном времени.
Для решения вспомогательной задачи удобно использовать MATLAB скрипт MainP4.m.
Файл MainP4.m
%Построение линии переключения
%(обратное время упрощенный объект)
tlp=1;
[t,x]=ode45('odefunP4',[0 tlp],[0 0]);
plot(x(:,1),x(:,2),'r')
hold on
%Обеспечение подбора t2 и Е
%(прямое время полный объект)
global t1 t2 T %Для передачи в odefunp4_2
t1=1.0; %Выбрано произвольно
t2=1.812;
T=2.06;
ti=T; %При подборе t2 ti=t2; при подборе T ti=T
[t,x]=ode45('odefunP4_2',[0 ti],[1 0 0]);
plot(x(:,2),x(:,3),'b')
Приведенный выше скрипт выполняет построение линии переключения в плоскости  и построение фазовой траектории объекта управления в соответствии с моментами переключения/выключения
и построение фазовой траектории объекта управления в соответствии с моментами переключения/выключения  , заданными в программе.
, заданными в программе.
Работа с программой для определения второго момента переключения выполняется следующим образом:
- параметр t1 задается произвольно;
- параметр ti задается равным t2 для ограничения времени построения фазовой траектории:
- параметр t2 подбирается так, чтобы соответствующая этому значеню траектория прикоснулась к линии переключения;
- величина t2, соответствующая соприкосновению фазовой траектории и линии переключения объявляется моментом второго переключения
- величины параметров t1и t2 сохряются для последующих экспериментов.
Работа с программой для определения момента выключения выполняется следующим образом:
- параметры t1 и t2 сохраняют свои значения после предыдущих экспериментов;
- параметр ti задается равным T для ограничения времени построения фазовой траектории;
- параметр T подбирается так чтобы к моменту времени t=T фазовая траектория пришла в требуемую конечную точку .
После окончания подбора величины параметра T запоминается величина  , которая объявляется точкой промежуточного финиша
, которая объявляется точкой промежуточного финиша  .
.
Для рассматриваемого примера использование скрипта MainP4 позволило получить следующие результаты:
 (П 4.6)
(П 4.6)
После выполнения описанных экспериментов становится известной комбинация параметров  , которая позволяет перевести объект управления в заданную точку плоскости . Однако эта комбинация параметров управления в пространстве
, которая позволяет перевести объект управления в заданную точку плоскости . Однако эта комбинация параметров управления в пространстве  вместо заданной точки
вместо заданной точки  приводит объект в точку промежуточного финиша
приводит объект в точку промежуточного финиша  .
.
Для определения набора параметров, позволяющих перевести объект управления в заданную точку  целесообразно выполнить серию экспериментов в каждом из которых с помощью MATLAB функции FMINSEARCH выполняется поиск таких параметров , при которых минимизируется расстояние между фактическим положением изображающей точки в момент
целесообразно выполнить серию экспериментов в каждом из которых с помощью MATLAB функции FMINSEARCH выполняется поиск таких параметров , при которых минимизируется расстояние между фактическим положением изображающей точки в момент  и точкой промежуточного финиша , т.е. минимум функции (П 4.7)
и точкой промежуточного финиша , т.е. минимум функции (П 4.7)
 (П 4.7)
(П 4.7)
Причем в каждом последующем эксперименте в качестве начальной точки поиска в пространстве используется результат предыдущего эксперимента, а положение точки промежуточного финиша систематически приближается к заданной конечной точке  .
.
Описанные выше эксперименты удобно выполнять с помощью MATLAB скрипта MainP5.m/
Файл MainP4_2.m
global x1f t x
x1f=0.152;
%Начальная точка поиска в плоскости параметров управления
P0=[1 1.81 2.06];
TT=fminsearch('fmsfunP4_2',[P0]);
%Отображение в окне команд результатов поиска
TT
%Отображение заданной точки промежуточного финиша
x1f
%Отображение достигнутой точки промежуточного финиша
x(length(t),1)
Файл fmsfunP4_2.m
function f=fmsfunP4_2(TT)
global tt x1f t x
tt = TT;
%Построение переходных процессов, соответствующих
% текущей комбинации параметров управления
[t,x]=ode45('odefunP4_3',[0 TT(3)],[1 0 0]);
%Вычисление расстояния между фактическим положением изображающей
% точки в момент окончания управления и заданной точкой
% промежуточного финиша
f=(x(length(t),1)-x1f)^2+(x(length(t),2)-0)^2+(x(length(t),3)-0)^2;
plot(t,x(:,1),t,x(:,2),t,x(:,3))
pause(0.1)
Файл odefunP4_3.m
function f=odefunP4_3(t,x)
global tt
%Генерация управления, соответствующего текущим параметрам
if t<tt(1)
u=-1;
elseif t<tt(2)
u=1;
else
u=-1;
end
if t>tt(3)
u=0;
end
%Вычисление правых частей уравнений управляемого объекта
f=[ x(2);-x(2)+2*x(3)+u;-2*x(3)+u];
При первом запуске скрипта MainP4_2 устанавливаются значения координат начальной точке поиска и точки промежуточного финиша в соответствиями с результатами работы со скриптом MainP4, т.е
P0=[1 1.81 2.06]
x1f=0.152
Результат первого запуска скрипта MainP4_2 можно рассматривать как уточнение координат начальной точки P0=[0.9878 1.8084 2.0574].
При втором запуске скрипта MainP4_2 значение координат начальной точки устанавливается в соответствии с результатом работы первого запуска, а точка промежуточного финиша приближается к заданной конечной точке путем присвоения x1f=0.07.
Результат второго запуска скрипта MainP4_2 можно рассматривать как уточнение координат начальной точки P0=[1.0384 1.83 2.0685].
При третьем запуске скрипта MainP4_2 значение координат начальной точки устанавливается в соответствии с результатом работы второго запуска, а точка промежуточного финиша приближается к заданной конечной точке путем присвоения x1f=0.0.
Результат третьего запуска скрипта MainP4_2 можно рассматривать как окончательное значение параметров управления P0=[1.0936 1.9033 2.1243], т.к полученная на третьей итерации комбинация параметров управления обеспечивает приход объекта управления в конечное положение с ошибкой 0.8%
Для получения результатов, сопоставимых с результатами решения задачи управления другими рассматриваемыми в курсовом расчете методами (модальное управление, параметрическая оптимизация, …) целесообразно за время переходного процесса принимать не момент попадания изображающей точки в заданное положение, а момент времени после которого длина вектора состояния становится менее 5% от начального значения.
_________________________________________________________________________
Список литературы
Дата добавления: 2019-03-09; просмотров: 82; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!