Принципы организации траекторных измерений
Измерения параметров движения ИСЗ по мере необходимости управления его траекторией выполняются с помощью радиотехнической системы траекторных измерений РСТИ и радиотехнической системы передачи командной информации РСПКИ. На различных этапах полета ИСЗ функции этих совмещенных систем несколько различаются, что необходимо учитывать при рассмотрении работы командно-измерительной системы.
На активном участке траектории вывода ИСЗ на орбиту функция РСТИ состоит в том, что она осуществляет с требуемой точностью непрерывное определение отклонений фактических координат спутника и составляющих его скорости от их расчетных значений. Число измерений, которые производятся на этом участке должно позволить получить полное представление о траектории вывода.
На участках пассивного полета с помощью РСТИ определяются фактические орбиты, по которым движется ИСЗ, и на основании этих вычислений на КВЦ рассчитываются данные целеуказаний для каждого измерительного пункта. Целеуказание содержит сведения о местоположении космического аппарата в координатах данного КИП в момент начала предполагаемого сеанса связи с ним и указания о величине задержки сигнала и его ожидаемого доплеровского сдвига. Эта информация позволяет не только «захватить» ИСЗ по угловым координатам, т. е. развернуть антенны КИП в направлении ИСЗ, но и обеспечить благоприятные условия «захвата» маломощного сигнала бортового радиомаяка за счет предварительной соответствующей настройки приемных устройств измерительных станций пункта. Кроме того, на этом этапе с помощью КВЦ оцениваются отклонения фактической орбиты от требуемой расчетной, что дает возможность решить вопрос о необходимости коррекции орбиты.
|
|
|
Если векторы Нт{h1т... hiт...hnт} и Нф{h1... hi... hn} характеризуют соответственно требуемую и фактическую траектории (орбиты) движения ИСЗ, зависящие от параметров hiт и hi, определяющих эти траектории, то за меру соответствия фактической траектории требуемой принимают обобщенный вектор промаха DH{Dhi}, где Dhi=hi-hiт. Здесь hi—совокупность параметров, которая может включать в себя параметры, определяющие положение спутника в пространстве: х, у, г и их производные х' у' z' или элементы орбиты е, р, i, W, wп, t, оп, т, а также различные физические константы среды, в которой происходит полет, и характеристики возмущающих воздействий, т. е. n³6.
На этапе коррекции орбиты функции РСТИ зависят от принятого метода управления ИСЗ. Различают корректирующий и следящий методы управления ИСЗ.
При корректирующем методе управления по результатам предварительно рассчитанного обобщенного вектора промаха DН определяют обобщенный вектор корректирующего управления DU{DUi ... DUi ... DUn}, который должен перевести спутник на новую орбиту, а затем в расчетный момент включают бортовые корректирующие двигатели.
|
|
|
Качество отработки космическим аппаратом корректирующего импульса оценивается только после завершения перехода и проведения вычислений элементов новой фактической орбиты.
Таким образом, при этом методе во время пребывания ИСЗ на переходной орбите корректирующие команды не подаются, а результаты траекторных измерений используются для определения элементов орбит до и после коррекции.
При следящем методе управления результаты траекторных измерений немедленно используются для расчета текущих отклонений фактических координат ИСЗ и составляющих его скорости от требуемых расчетных и для формирования команд управления, которые через РСПКИ подаются на бортовые средства коррекции параметров движения в течение всего времени маневра. Следящее управление используется там, где требуется высокая точность маневрирования.
Организация системы траекторных измерений складывается из размещения КИП в различных географических пунктах, измерений на самом КИП и взаимодействия КИП с КВЦ и КВЦ через КИП с бортом спутника.
|
|
|
Для осуществления траекторных измерений на активных участках полета ИСЗ радиотехнические средства РСТИ должны быть расположены так, чтобы ИСЗ был все время в зоне их видимости. При этом средства должны обеспечивать на этих участках возможность измерения текущих параметров движения спутника в любой точке траектории с заданной точностью. К решению этих задач наряду со стационарными КИП привлекаются и передвижные (корабельные) КИП.
Для определения элементов орбиты на пассивных участках траектории КИП располагают так, чтобы получить за время движения КА по этому участку возможно большее число независимых измерений параметров его движения.
Для нахождения траектории полета ИСЗ необходимо решить систему уравнений движения спутника массой т, находящегося под воздействием суммарного вектора всех внешних сил Fs.
 (1) 2
(1) 2
Для ее однозначного решения необходимо иметь шесть начальных условий, в качестве которых выступают шесть независимых измерений, проводимых РСТИ. Такой путь определения траектории (орбиты) носит название метода оценки по минимуму данных.
|
|
|
Принципиально каждый КИП может определить все независимые координаты либо в экваториальной, либо в горизонтальной топоцентрической сферической системе координат. В последнем случае, например, ими будут наклонная дальность КИП—ИСЗ Rисз радиальная скорость движения ИСЗ относительно КИП Rисз, азимут a и угол места b (или их направляющие косинусы cosa, cosb) и производные угловых координат a', b' (или dcos α/dt, dcos b/dt).
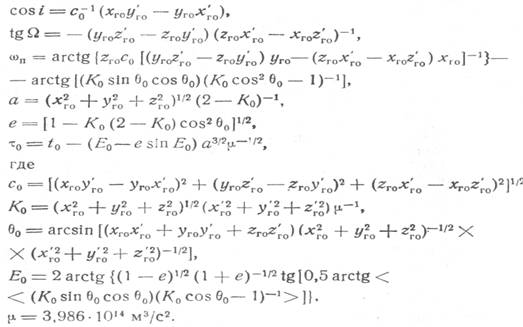
Элементы орбиты рассчитываются в следующей последовательности. В некоторый момент to местного звездного времени КИП измеряет обобщенные координаты спутника. Затем, используя формулы перехода от одной системы координат к другой, определяются обобщенные координаты ИСЗ в абсолютной геоцентрической системе координат (для этого момента to) Хго, Yго, Zго x'го, y'го, z'го.
Эта совокупность обобщенных координат ИСЗ и используется в качестве начальных условий при интегрировании системы дифференциальных уравнений его движения. Элементы орбиты выражаются через начальные условия так:
 (2) 3
(2) 3
Из системы (2) следует, что для определения элементов орбиты не обязательно измерять все шесть сферических координат ИСЗ. Важно только, чтобы общее число независимых измерений было не менее шести. Можно, например, измерять только одну наклонную дальность Rисз. (или R’исз) в шесть моментов времени. Квазидетерминированный характер движения ИСЗ позволяет и в этом случае получить однозначное решение уравнения (9.2).
Несмотря на то, что шести независимых измерений достаточно, чтобы разрешить систему (2), точность получающихся результатов оказывается недостаточной из-за существенного влияния на них ошибок измерения. Чтобы повысить точность измерений, увеличивают их число, т. е. вводят информационную избыточность.
Организовать измерения параметров движения можно с помощью одного КИП (однопунктовый метод) или иметь разветвленную сеть КИП (многопунктовый метод).
Однопунктовый метод проще, но он требует значительного времени для того, чтобы выполнить достаточное число измерений и получить нужную точность. Для обслуживания этапов вывода и спуска этот метод пригоден.
Многопунктовый метод позволяет: 1) обеспечить высокий темп выдачи измерений, 2) исключает некоторые систематические погрешности измерений, присущие отдельным КИП, и 3) повышает надежность работы всего командно-измерительного комплекса за счет дублирования радиотехнических средств. В то же время привлечение к измерениям большого числа КИП удорожает РСТИ и вызывает затруднения в организации передачи данных. Обычно в состав РСТИ включается не менее трех—шести КИП. Но на выбор числа пунктов и их размещение влияют требования точности измерений и надежности работы. Точность РСТИ во многом зависит от метода организации определения положения КА отдельными КИП, т. е. первичной обработки информационных параметров, выделяемых из принятого сигнала.
Наземная станция командно-измерительной системы КИС в комплексе с бортовой аппаратурой обеспечивает измерение наклонной дальности, радиальной скорости R' и угловых координат (азимута a и угла места b).
При определении наклонной дальности чаще всего используется фазовый метод. Измерение дальности этим методом основано на том, что фазовый сдвиг любого гармонического колебания при распространении его до ИСЗ и обратно пропорционален времени запаздывания tR=2R/c. Немодулированное гармоническое колебание высокой частоты jо непригодно для измерения дальности фазовым методом из-за неоднозначности измерений и незнания фазового сдвига jотр, возникающего при отражении сигнала от ИЗС или при переизлучении. Для устранения неоднозначности и исключения влияния jотр на точность измерения пользуются двухчастотным методом, когда излучается два синусоидальных колебания, сдвинутых по частоте на величину jс=2pfс. При этом текущие фазы jи1 и jп2 излучаемых и jп1 и jп2 принимаемых колебаний будут:
 4
4
Если wс<<wо, то условия распространения и отражения обоих колебаний можно полагать одинаковыми и считать, что jотр1 = jотр2. Тогда для измерения задержки tR надо оценить разностный сдвиг фаз
 5
5
Структурная схема такого фазового дальномера, иногда называемого одношкальным, изображена на рисунке 13.

Рис. 13. Структурная схема фазового дальномера
Большую точность измерения дальности можно получить, увеличив число излучаемых частот. При двушкальном отсчете (излучение на трех частотах) частота jст формирует шкалу точного, но неоднозначного отсчета, а частота φСГ — однозначного но грубого отсчета.
Таким образом, сигнал высокоточного фазового радиодальномера с однозначным отсчетом представляет собой набор (сетку) гармонических колебаний. Среднеквадратические ошибки измерения дальности современными КИС составляют менее 10...30 м.
Радиальную скорость R' перемещения ИСЗ можно измерить, дифференцируя дальность. Однако такой метод не обеспечивает достаточной точности и почти не применяется. Основными методами измерения R' являются методы, основанные на эффекте Доплера. При этом измерения скорости возможны беззапросным и запросным методами.
Беззапросный метод, рисунок 14,а, предполагает наличие на спутнике и на Земле в составе КИС высокостабильных и периодически синхронизируемых эталонов времени. Сигнал частоты fоб постоянно (или периодически по программе) излучается бортовым передатчиком Пер. б. маяка ИСЗ на Землю. На наземный приемник Пр. 3 с учетом частоты Доплера Fд приходит сигнал частоты fз. Этот сигнал после усиления поступает на измеритель Изм, где он сравнивается с сигналом эталонной частоты fo от системы единого времени.

Рис. 14. Структурные схемы доплеровской системы измерения радиальной
скорости при беззапросном (а) и запросном (б) методах
Измеренная доплеровская частота пропорциональна радиальной скорости FД=|fЗ-fОЗ|=fОЗR'C.
Следует обратить внимание на то, что при наличии взаимной нестабильности бортового и наземного эталонов частоты неизбежно появляются ошибки в определении скорости. Требования к относительной стабильности эталонов (fсз-fоб)/fоз=DFД/fo3 на борту и на Земле могут быть определены по заданной точности dR' измерения скорости: DFД/foз=dR/c. Так, при максимально допустимой ошибке dR'=0,1 м/с относительная нестабильность должна быть не хуже 3*  в течение всего времени функционирования ИСЗ.
в течение всего времени функционирования ИСЗ.
При запросном методе измерения (рисунок 14,6) излученный с Земли сигнал частоты foз после приема его на ИСЗ передается обратно на Землю. В измерителе доплеровской частоты ИЗМ сигнал эталонной частоты foз сравнивается с сигналом частоты fз, в котором содержится доплеровский сдвиг радиолиний «Земля— ИСЗ» и «ИСЗ—Земля», поэтому
FД=|fЗ-fОЗ|= fОЗ [1±R'/c+(R'/c)2-1] » 2fОЗR'/c
где величиной (R'/c) 2 можно пренебречь в силу ее малости.
При запросном методе требования к взаимной синхронизации эталонов времени существенно ниже. Среднеквадратические ошибки при измерении радиальной скорости ИСЗ составляет менее 0,01 ...0,1 м/с. Угловые параметры ИСЗ могут измеряться с помощью амплитудных суммарно-разностных пеленгаторов, а при требованиях высокой точности фазопеленгаторами. Фазовыми методами можно также измерять угловые скорости перемещения спутника.
Фазовый метод измерения угловых параметров движения ИСЗ основан на измерении разности расстояний от ИСЗ до двух базисных точек Б1 и Б2 (рисунке 15,а). На размещенные в точках Б1 и Б2 приемники приходят сигналы от бортового передатчика—маяка. Если R1>R2, то сигнал в антенну приемника Пр1 придет на время запаздывания tr позже, чем на приемник Пр2, где tR=R1-R2)/c=DR/c.

Рис.15.Структурная схема системы измерения угловых
параметров движения ИСЗ при фазовом (а) и
доплеровском (б) методах
На практике R1 и R2 много больше базового расстояния d, поэтому линии визирования ИСЗ из точек Б1 и Б2 можно считать параллельными. В этом случае при малых углах а величина DR=dsin a» da= tRc, откуда a=tRc /d. Измерив задержку фазовым методом, т. е. по разности фаз сигналов в антеннах Пр1 и Пр2, можно найти а. Разность фаз jR=2pсtR/l0 и, следовательно, а= lоjR/2pd.
Из последнего выражения следует, что угловая скорость a’ может быть найдена как a'= l0/2pdj’R т. е. для оценки угловой скорости ИСЗ надо определить скорость изменения разности фаз.
Можно поступить иначе. Частоты сигналов fз1 и fз2, приходящих на приемники Пр1 и Пр2, равны (см. рис. 15,6) fз1=fо(1-R'1/c) и fз2=fо(1-R'2/c). Тогда разность доплеровских частот DFД=fЗ2-fЗ1=1/l0(R'1-R'2) и, следовательно, a/=D FДl0/d.
Среднеквадратические ошибки измерения угловых параметров ИСЗ менее (3...5)',а при больших измерительных базах ошибки в оценках углов не превышают (10... 20)', а угловых скоростей 0,1''.
После первичной обработки данные о параметрах движения ИСЗ, полученные командно-измерительной системой, поступают по линиям связи в центр обработки информации. Для РСТИ первичная обработка представляет собой этап предварительной обработки, получаемой командно-измерительной системой информации. На этом этапе исключаются грубые ошибки измерений, которые могут быть вызваны, например, неисправностью аппаратуры, и осуществляется статистическое сглаживание результатов измерений за некоторый интервал времени, например за сеанс наблюдения. Статистическое сглаживание на этом этапе, обеспечиваемое благодаря фильтрующей способности самих радиотехнических измерителей и главным образом в результате специальной машинной обработки, полученной с КИП информации, не только повышает точность измерений, но и позволяет снизить избыточность передаваемой на координационно-вычислительный центр информации, за счет чего удается избежать перегрузки линий передачи данных и уменьшить стоимость связной аппаратуры.
Для упрощения процедуры обработки информации и ее передачи через ЛПД все результаты измерений представляются в цифровой форме, а для повышения помехоустойчивости приема информации она, прежде чем поступить в ЛПД, кодируется. Кроме того, все результаты измерений, передаваемые с ИП, сопровождаются указанием момента, в который они были получены. Погрешности, возникающие в результате привязки передаваемой информации к системе единого времени, вызывают появление дополнительных ошибок. Нетрудно видеть, что если имеют место ошибки привязки Dt, то появляются составляющие ошибки измерения дальности и радиальной скорости движения
 6
6
и ошибки измерения угловых координат a и b
 7
7
После декодирования принятая информация поступает в координационно-вычислительный центр. Здесь вторично обрабатываются результаты измерений, получаемые с КИП. Обработка начинается с пересчета принятых от различных КИП результатов измерений в единую базовую систему координат, например в абсолютную геоцентрическую. Затем с учетом моментов проведения измерений производится статистическое усреднение (сглаживание) результатов измерений, относящихся к одному ИСЗ, проведенных несколькими КИП за длительное время, например за ряд сеансов связи.
В результате вторичной обработки определяются параметры фактической траектории ИСЗ hi, рассчитываются данные целеуказаний для КИП, вычисляется обобщенный вектор промаха DН, который используется для нахождения соответствующего обобщенного вектора управления DU и формирования команд управления.
Обозначим через q1T...qiT...qmT ансамбль требуемых, а через q1...qi...qm — ансамбль фактических параметров движения ИСЗ, измеряемых на КИП. Здесь под qi понимается любой параметр движения спутника, измеренный в некоторый момент ts, на одном или нескольких КИП. Например, q1... q5 могут быть измерениями дальности до КА с одного КИП в разнесенные моменты t1,.... ts, q6,q7,q8 могут быть измерениями радиальной скорости, выполненными на трех разнесенных КИП в один и тот же момент t6, и т. п.
Поскольку параметры движения ИСЗ qi определяются параметрами hiф фактической траектории, для вычисления hi необходимо решить систему нелинейных уравнений, связывающих эти параметры:
 (3)8
(3)8
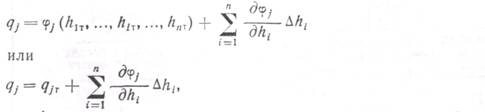
причем т>>п, так как измерения параметров движения избыточны и их число т превышает число параметров траектории п. При малых отклонениях фактической траектории от расчетной, т. е. при наличии достаточно точного прогноза траектории, систему уравнений (9.3) можно заменить системой уравнений вида
 (4)9
(4)9
где hiт—прогнозируемые значения параметров требуемой траектории; Dhi=hi-hiт—поправка на отклонение фактической траектории от требуемой; qjT —прогнозируемый параметр движения, рассчитанный для требуемой траектории; дj j/дhi—баллистические производные, значения которых зависят от расположения КИП относительно траектории движения ИСЗ. Решение системы уравнений (3) дает возможность найти параметры фактической траектории hi. Однако, учитывая, что измерения qj на практике всегда сопровождаются ошибками, вместо hi удается получить лишь его оценку hi*=hiT+Dhi*. Считая, что точность прогноза hiт достаточна, нахождение hi, сводится, по существу, к определению поправок Dht* из системы уравнений (4).
Если полагать ошибки измерений qj независимыми, несмещенными и распределенными по нормальному закону с дисперсией ошибки sj2, то для обработки измерений целесообразно использовать метод наименьших квадратов. Тогда оценка поправки Dhi* может быть найдена из условия обращения в минимум следующего функционала, где т — по-прежнему число измерений параметров движения:
 (5)10
(5)10
На практике точность прогноза не всегда бывает достаточной, поэтому для повышения точности оценок параметров траектории используют метод последовательных приближений, при котором исходное значение hiT принимают за нулевое приближение, значение hi*—за первое приближение, вводимое в качестве нового начального условия при расчете второго приближения, и т. д. Число шагсв приближения k определяется требуемой точностью измерений, когда поправка (Dhi*)k оказывается меньше допустимой величины.
На рисунке 16 приведена структурная схема, иллюстрирующая алгоритм определения параметров траектории по данным измерений РСТИ.

Рис. 16. Структурная схема алгоритма определения параметров
траектории ИСЗ по данным измерений
Дата добавления: 2018-04-04; просмотров: 959; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!