Основные режимы работы электропривода
Длительность работы и ее характер определяют рабочий режим привода. Для электропривода принято различать три основных режима работы: продолжительный, кратковременный и повторно-кратковременный.
Продолжительный режим — это режим работы такой длительности, при которой за время (t) работы двигателя мощностью Р температура всех составляющих электроприводустройств достигает установившегося значения (рис. 17.4, а). В качестве примеров механизмов с длительным режимом работы можно назвать центробежные насосы насосных станций, вентиляторы, компрессоры, конвейеры непрерывного транспорта, дымососы, бумагоделательные машины, машины для отделки тканей и т.д.
Кратковременный режим — это такой режим работы, при котором рабочий период относительно краток (рис. 17.4, б) и температура двигателя не успевает достигнуть установившегося значения. Перерыв же в работе исполнительного механизма достаточно велик, так что двигатель успевает охладиться практически до температуры окружающей среды. Такой режим работы характерен для самых различных механизмов кратковременного действия: шлюзов, разводных мостов, шасси самолетов и многих других.
Повторно-кратковременный режим (рис. 17.4, в) — это такой режим работы, при котором периоды работы V чередуются с паузами (остановка или холостой ход), причем ни в один из периодов работы температура двигателя не достигает установившегося значения, а во время снятия нагрузки двигатель не успевает охладиться до температуры окружающей среды. Характерной величиной для повтор- но-кратковременного режима является отношение рабочей части периода V ко всему периоду Т. Эта величина именуется относительной продолжительностью работы (ПР %) или относительной продолжительностью включения (ПВ %). Примерами механизмов с повторно-кратковременным режимом работы могут служить краны, ряд металлургических станков, прокатные станы, буровые станки в нефтяной промышленности и т.д.
|
|
|
| р | V1 | г | — | ||||||
| 0 | to to | « Т * | t | ||||||
| а б в |
В соответствии с основными режимами работы электропривода различно определяется и номинальная мощность электродвигателя. Условия нагрева и охлаждения двигателя при повторно-кратков- ременном режиме существенно отличаются от условий работы в продолжительном режиме. Например, условия охлаждения обмотки возбуждения двигателя постоянного тока параллельного возбуждения практически остаются неизменными и при остановке двигателя, а условия охлаждения якоря при остановке сильно ухудшаются. По этой причине двигатель постоянного тока, рассчитанный для продолжительной работы с неизменными условиями охлаждения, при повторно-кратковременном режиме будет использоваться нерационально; при предельно допустимом нагреве обмотки якоря и коллектора обмотка возбуждения будет нагреваться значительно ниже допустимой температуры.
|
|
|
Следовательно, целесообразно для повторно-кратковременного режима конструировать двигатели специальных типов. Руководствуясь этим, электротехническая промышленность изготовляет крановые электродвигатели, рассчитанные на три различных номинальных режима: продолжительный, кратковременный и повторно-кратковременный. Соответствующее указание делается на табличке электродвигателя; под его номинальной мощностью следует понимать полезную механическую мощность на валу в течение времени, соответствующего его номинальному режиму, т.е. продолжительному, кратковременному или же повторно-кратковременному при определенной продолжительности включения.
В течение короткого промежутка времени двигатель может развивать мощность значительно большую, чем номинальная. Мгновенная перегрузочная мощность двигателя — это наибольшая мощность на валу в течение малого промежутка времени, развиваемая двигателем без каких-либо повреждений.
|
|
|
Мгновенные перегрузочные свойства двигателя обычно характеризуются коэффициентом перегрузки по моменту \мом, т. е. отношением максимального кратковременно допустимого перегрузочного момента к номинальному моменту: \мом = Мтах/Мном. Для большинства двигателей \мом « 2 (у специальных электродвигателей \мом = 3—4).
Часто по условиям работы привода важна допустимая перегрузка двигателя не мгновенная, а на определенный, относительно короткий промежуток времени. В соответствии с этим требованием указывается кратковременная перегрузочная мощность двигателя — мощность, развиваемая двигателем в течение определенного ограниченного промежутка времени (5,10,15, 30 мин и т.д.), после чего двигатель должен быть отключен на время, в течение которого он успевает охладиться до температуры окружающей среды. Для одного и того же двигателя соотношения между его продолжительной перегрузочной и кратковременной перегрузочной мощностями зависят от характеристик и конструкции двигателя.
Выбор мощности двигателя
Правильный выбор мощности двигателя для привода должен удовлетворять требованиям экономичности, производительности и надежности рабочей машины. Установка двигателя большей мощности, чем это необходимо по условиям привода, вызывает излишние потери энергии при работе машины, обусловливает дополнительные капитальные вложения и увеличение габаритов двигателя. Установка двигателя недостаточной мощности снижает производительность рабочей машины и делает ее работу ненадежной, а сам двигатель в подобных условиях легко может быть поврежден.
|
|
|
Двигатель должен быть выбран так, чтобы его мощность использовалась возможно полнее. Во время работы двигатель должен нагреваться примерно до предельно допустимой температуры, но не выше ее. Кроме того, двигатель должен нормально работать при возможных временных перегрузках и развивать пусковой момент, требуемый для данной рабочей машины. В соответствии с этим мощность двигателя выбирается в большинстве случаев на основании условий нагрева (выбор мощности по нагреву), а затем производится проверка соответствия перегрузочной способности двигателя условиям пуска машины и временным перегрузкам. Иногда (при большой кратковременной перегрузке) приходится выбирать двигатель по требуемой максимальной мощности. В подобных условиях длительная мощность двигателя часто полностью не используется.
Выбор мощности двигателя для привода с продолжительным режимом работы. При постоянной или мало изменяющейся нагрузке на валу мощность двигателя должна быть равна мощности нагрузки. Проверки на нагрев и перегрузку во время работы не нужны. Однако необходимо проверить, достаточен ли пусковой момент двигателя для пусковых условий данной машины.
Мощность продолжительной нагрузки ряда хорошо изученных механизмов определяется на основании проверенных практикой теоретических расчетов.
Например, мощность двигателя (в кВт) для вентилятора
Р = КДр/1000г1венТ1пер,
где V — количество нагнетаемого или всасываемого воздуха, м3/с; Ар — перепад давлений, Па; т]вен — КПД вентилятора (у крыльчатых вентиляторов 0,2 — 0,35, у центробежных — до 0,8); т]пер — КПД передачи от двигателя к вентилятору; произведениеVAр представляет собой полезную мощность вентилятора, а 1000 — коэффициент для перевода мощности в киловатты.
Во многих случаях мощность двигателя приводов с продолжительным режимом работы рассчитывается по эмпирическим формулам, проверенным длительной практикой. Для малоизученных приводов продолжительной нагрузки мощность двигателя часто определяется на основании удельного расхода энергии при выпуске продукции или экспериментально путем испытания привода.
Выбор мощности двигателя при кратковременном и повторно- кратковременном режимах работы. При кратковременном, повторно-кратковременном и продолжительном с переменной нагрузкой режимах важно знать закон изменения во времени превышения температуры Ф двигателя над температурой окружающей среды.
Электрическая машина с точки зрения нагрева представляет собой весьма сложное тело. Тем не менее при расчетах, не требующих большой точности, можно считать электрическую машину однородным телом. Это дает возможность применить к ней упрощенное уравнение нагрева
Qodt = Cdti + Htidt, (17.10)
где С — теплоемкость машины; Н — ее теплоотдача;Q{)— теплота, выделяющаяся в машине в единицу времени.
Так как приt—>оо изменения температуры нет, т. е.Q0dt = H$miiXdt и -dmax=Q0/Htто вместо (17.10) можно записать
п
Атаxdt = —<*» + Ш.
Н
Решая это уравнение методом разделения переменных, получаем Ае-* = Ътах -
где т = С/Н— постоянная времени нагрева машины, определяемая экспериментально.
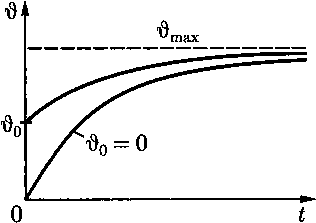
Приt = 0 начальное превышение температуры -в = -вд» так что постоянная А = - и закон нарастания превышения температуры машины:
« = - (flmax - flo)e"</T. (17.11)
Таким образом, в данном случае, как и при ^ = 0, превышение температуры возрастает по экспоненциальному закону, стремясь к значению Начальное превышение температуры изменяет лишь скорость изменения температуры, но не характер процесса (рис. 17.5).
При различных значениях продолжительной нагрузки одной и той же машины зависимости~Q(t)различаются лишь ординатами (рис. 17.6). Наибольшее допустимое для данной машины превышение температуры равно Прямая Ф = $мош параллельная оси абсцисс, пересекает в различных точках кривые $(£), соответствующие различным значениям мощности нагрузки Рк электродвигателя. Абсцисса точки пересечения определяет тот промежуток времени
в течение которого мощность двигателя может быть временно равна мощности Рк, представляющей собой перегрузку по отношению к его номинальной мощности в продолжительном режиме. График нагрева, асимптотически приближающийся к соответству-
|
|
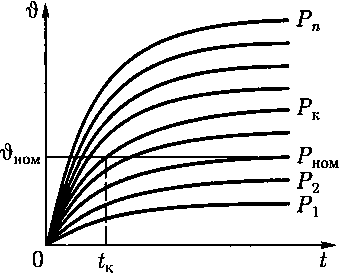
Рис. 17.5 Рис. 17.6
ет номинальной мощности двигателя Рпом. При нагрузках, меньших Риош мощность двигателя полностью не используется. Однако если двигатель загружается на относительно короткое время, то по существу он тоже используется не полностью. Целесообразно его кратковременно перегрузить, и чем меньше продолжительность работы, тем больше должна быть эта перегрузка. Предел повышения нагрузки двигателя по мере уменьшения продолжительности включения определяется мгновенной перегрузочной мощностью двигателя, зависящей от его электрических свойств (максимального момента у асинхронного двигателя, условий коммутации у машин постоянного тока и т.п.).
При повторно-кратковременном режиме двигатель попеременно то нагревается, то охлаждается. Изменение его температуры в течение времени каждого цикла зависит при этом от предыдущего теплового состояния. Зависимость нагрева и охлаждения машины от времени в подобных условиях показана на рис. 17.7. Конечное превышение температуры каждой данной части цикла равно начальному превышению температуры для последующей части цикла. Если во время той или иной части цикла наступает значительное изменение условий охлаждения (остановка двигателя или заметное изменение частоты вращения), то изменяется постоянная времени т = = С/Н нагрева двигателя, что должно быть учтено при построении графиков.
|
|
Определение мощности двигателя по условиям нагрева посредством построения графиков нагрева (или соответствующим анали-
| t |
тическим методом) требует значительной затраты времени и не дает точных результатов. Здесь эти построения приведены лишь для того, чтобы наглядно показать картину изменения нагрева двигателя при переменной нагрузке.
В большинстве случаев для выбора мощности двигателя применяются более простые методы, в частности метод эквивалентного тока. В основу этого метода положено допущение, что при переменной нагрузке двигателя его средние потери должны быть равны потерям при продолжительной (номинальной) нагрузке. Как известно, мощность потерь двигателя складывается из постоянных Рпост и переменных Рпер мощностей. Мощность постоянных потерь равна сумме мощности потерь на трение, в магнитопроводе (у асинхронных двигателей и двигателей постоянного тока с параллельным возбуждением), на возбуждение у синхронных двигателей и двигателей с параллельным возбуждением. Мощность переменных потерь можно считать пропорциональной квадрату рабочего тока / двигателя и сопротивлению соответствующей обмотки Д, причем приближенно можно считать последнее постоянным. Если ток изменяется в течение отдельных промежутков времени, то за все рабочее время
|
|

При эквивалентной неизменной нагрузке током 1Ж за то же время Т потери энергии в двигателе должны быть равны
(^пост Щ
Нагревание двигателя, обусловленное потерями, в обоих случаях должно быть одинаковым. На этом основании определяем эквивалентный ток:
|
|
|
|

| (17.12) |
+ + - + Чч + - + Intn
tx+t2+ ... + tk+ ... + tn
>n
|
|
Зная эквивалентный ток, номинальное напряжение и номинальный коэффициент мощности, можно определить номинальную мощность двигателя:
|
|

Метод эквивалентного тока можно применять лишь при постоянстве мощности потерь в магнитопроводе и на трение, а также сопротивлений обмоток в течение всего рабочего времени. Такому условию, например, не удовлетворяет двигатель с последовательным возбуждением, у которого при изменениях нагрузки сильно изменяются поток и частота вращения (следовательно, мощность потерь в стали магнитопровода и на трение).
В ряде случаев условия нагрузки определяют непосредственно момент, требуемый от двигателя, а не ток. В этих случаях можно пользоваться методом эквивалентного момента: у всех электродвигателей вращающий момент пропорционален произведению тока и потока. У двигателей переменного тока можно приближенно считать постоянным коэффициент мощности. Наконец, магнитный поток можно считать практически постоянным у всех двигателей, кроме двигателей с последовательным и смешанным возбуждением. При таких упрощениях можно считать вращающий момент
Мвр = А^р/,
где А^р — постоянная величина, откуда из (17.12) следует, что
_ iMfa + М2% + ... + M\tk+... +MltnП71Т>
MbP3K"V + + ... + tk+ ... + tn ' ( }
По эквивалентному моменту и номинальной угловой скорости двигателя шном рассчитывается номинальная мощность двигателя
■^ном ■^вр.эк^ном*
Выбрав номинальную мощность двигателя на основании расчета по методу эквивалентного тока или эквивалентного момента, необходимо затем проверить, достаточен ли максимальный момент Мтах двигателя для того, чтобы удовлетворить требованиям кратковременных перегрузок данного привода; иными словами, должно быть выполнено условие: коэффициент перегрузки двигателя \мом должен быть больше отношения максимального момента Мтах нагрузки к номинальному моменту двигателя, т.е.
^мом -^тах/-^ном*
Выбор вида и типа двигателя
При длительной неизменной нагрузке задача выбора вида двигателя (постоянного тока, асинхронного, синхронного) относительно проста. Для подобного привода, не требующего регулирования скорости, ПУЭ (Правила устройства электроустановок) рекомендуют независимо от мощности применять синхронные двигатели. Эта рекомендация объясняется тем, что современный синхронный двигатель пускается в ход так же, как асинхронный, а его габариты меньше и работа экономичнее, чем асинхронного двигателя той же мощности (выше cos ф, больше максимальный момент).
Но если электродвигатель должен работать в условиях регулируемой частоты вращения, частых пусков, выбросов и сбросов нагрузки и т. п., то при выборе вида двигателя необходимо сопоставить условия привода с особенностями механических характеристик различных видов электродвигателей. Принято различать естественную
| п |
|
Рис. 17.8 |

| М |
| 0 |
и искусственную механические характеристики двигателя. Первая соответствует номинальным условиям его включения, нормальной схеме соединений и отсутствию каких-либо добавочных элементов в цепях двигателя. Искусственные характеристики получаются при изменении напряжения на двигателе, включении добавочных элементов в цепи двигателя и соединении этих цепей по специальным схемам. На рис. 17.8 сопоставлены рассмотренные ранее естественные меха-
нические характеристики различных двигателей.
| (17.14) |
Важным критерием для оценки механических характеристик служит их жесткость:
ot = АМ/Ап.
Жесткость может быть различной для отдельных участков характеристики.
В зависимости от значения жесткости принято делить механические характеристики на абсолютно жесткие, An — 0, а = оо (синхронные двигатели), жесткие, у которых изменение частоты вращения мало, а = 40 — 10 (линейная часть характеристики асинхронного двигателя, характеристика двигателя параллельного возбуждения), мягкие с большим изменением частоты вращения, у которых а < 10 (характеристика двигателя последовательного возбуждения, искусственная характеристика асинхронного двигателя с фазным ротором, искусственная характеристика двигателя постоянного тока параллельного возбуждения).
Требования к жесткости механической характеристики в ряде случаев служат основанием для выбора вида двигателя. Например, для подъемно-транспортных механизмов желательна мягкая характеристика, а для станов холодной прокатки стали нужна очень жесткая характеристика.
При частых пусках и непостоянной нагрузке наиболее надежным и простым в эксплуатации и вместе с тем дешевым является асинхронный двигатель с короткозамкнутым ротором. Двигатель с фазным ротором дороже, его обслуживание сложнее, габариты больше, a cos ф меньше (из-за большего воздушного зазора). Преимущества фазного ротора в отношении пускового момента незначительны по сравнению с короткозамкнутым ротором, имеющим двойное беличье колесо. Поэтому двигатели с контактными кольцами устанавливаются лишь при наличии особых требований к пусковомуMo
менту или к пусковому току (требований, связанных с ограниченной мощностью трансформаторной подстанции и характером их нагрузки). Таким образом, для мощностей до 100 кВт при нерегулируемом приводе наиболее распространен асинхронный короткозамкнутый двигатель. При больших мощностях, если невозможно применить короткозамкнутый асинхронный двигатель, устанавливается асинхронный двигатель с фазным ротором.
В недалеком прошлом для регулирования частоты вращения асинхронных двигателей применялись широко только два существенно несовершенных метода: включение резисторов в цепи ротора и переключение числа пар полюсов обмотки статора. Но первый метод экономически оправдан лишь при узких пределах регулирования и постоянстве момента на валу двигателя, а второй обеспечивает лишь ступенчатое регулирование и практически применяется для металлорежущих станков при небольших мощностях.
В настоящее время положение существенно изменилось благодаря внедрению силовых полупроводниковых преобразователей. Они дают возможность преобразовывать частоту переменного тока, что позволяет плавно и в широких пределах регулировать угловую скорость вращающегося магнитного поля, а следовательно, экономично и плавно регулировать частоту вращения асинхронных и синхронных двигателей. Двигатель постоянного тока стоит значительно дороже, требует большего ухода и изнашивается быстрее, чем двигатель переменного тока. Тем не менее в ряде случаев предпочтение отдается двигателю постоянного тока, позволяющему простыми средствами изменять частоту вращения электропривода в широких пределах (3:1,4:1 и более).
В качестве примеров приводов, для которых рекомендуется постоянный ток, назовем следующие: в металлургической промышленности — реверсивные прокатные станы, регулируемые нереверсивные станы при многодвигательном приводе, вспомогательные механизмы повторно-кратковременного режима работы, доменные подъемники; в металлообрабатывающей промышленности — токарные специальные станки.
Конструкцию (тип) двигателя выбирают в зависимости от условий окружающей среды. Приходится учитывать необходимость защиты среды от возможных искрообразований в двигателе (при наличии горючей пыли, взрывоопасных смесей и т.п.), а также самих двигателей от попадания в них влаги, пыли, агрессивных химических веществ из окружающей среды.
Различают несколько основных типов конструкции двигателей.
Двигатели открытого типа с большими вентиляционными отверстиями в подшипниковых щитах и станине для лучших условий охлаждения целесообразно применять в немногих случаях: приходится считаться с легкостью засорения такого двигателя в производственных условиях и опасностью поражения током обслуживающего персонала при прикосновении к открытым токоведущим частям.
Двигатели защищенного типа имеют вентиляционные отверстия, которые закрыты решетками, защищающими двигатель от попадания внутрь капель д ождя, посторонних частиц, опилок и т. п., но не пыли. Такие двигатели могут устанавливаться на открытом воздухе.
Двигатели закрытого типа устанавливаются в запыленных помещениях при наличии в воздухе паров едких испарений и т. п. Для улучшения охлаждения таких двигателей применяется продувание охлаждающего воздуха. Последний подводится и отводится по специальным воздухопроводам. В сырых помещениях применяются защищенные двигатели со специальной влагостойкой изоляцией. Во взрывоопасных помещениях, содержащих горючие газы или пары, устанавливаются взрывозащищенные двигатели.
Управление электроприводом
Управление электроприводами заключается в осуществлении пуска, регулировании скорости, торможения, реверсирования, а также в поддержании режимов работы привода в соответствии с требованиями технологического процесса.
Для управления электроприводами служат релейно-контакторные аппараты, датчики состояния электропривода, управляющие ЭВМ, встроенные микропроцессорные системы, преобразователи и т.п.
Различают разомкнутые и замкнутые (см. рис. 17.1) системы управления. Разомкнутые системы не содержат обратных связей и поэтому возмущающее воздействие (например, нагрузка на валу двигателя) приводит к изменению режима работы привода. В замкнутых системах заданный режим работы привода не зависит от возмущающих воздействий и поддерживается автоматически благодаря наличию обратных связей.
Ограничимся здесь описанием принципов управления в разомкнутых системах.
В приводах с нерегулируемым или ступенчато регулируемым режимом работы применяется управление на основе релейно-контак- торной аппаратуры (см. рис. 16.14), в более сложных — на основе управляемых тиристорных преобразователей.
Электропривод переменного тока. Для регулирования частоты вращения асинхронного двигателя тиристоры включаются в цепь статора или ротора. В первом случае можно регулировать ампли- туду (фазное регулирование) или частоту (частотное регулирование) напряжения на обмотках статора и, следовательно, вращающий момент на валу двигателя [см. (14.35)]. Во втором случае можно изменять активное сопротивление цепи ротора и таким образом (см. рис. 14.27) регулировать его частоту вращения.
л/
|
|

На рис. 17.9 приведена схема преобразователя {регулятора) переменного напряжения на обмотках статора асинхронного двигателя с двумя встречно-параллельными тиристорами в каждой фазе. Система управления СУ синхронно открывает тиристоры в порядке чередования фаз. Изменяя момент времени включения тиристоров (см. рис. 10.42), можно регулировать амплитуду напряжения основной гармоники. Выключение тиристоров осуществляется автоматически при изменении полярности напряжения соответствующей фазы. Такой режим называется естественной коммутацией.
Искусственной коммутацией называется выключение тиристора при подключении к его выводам какого-либо источника энергии, создающего в нем ток обратного направления. Применение искусственной коммутации рассматривалось ранее в автономных инверторах (см. рис. 10.53 и 10.55). Примером применения искусственной коммутации в электроприводе может служить управление током в цепи фазного ротора асинхронного двигателя (рис. 17.10). Рабочий тиристорVSзамыкает через резисторRxцепь выпрямленного при помощи трехфазной мостовой схемы (см. рис. 10.40) тока ротора. Узел искусственной коммутации УК, обведенный на рисунке штриховой линией, содержит вспомогательный тиристорVSK,резистор RKи конденсатор Ск.
|
|

Пусть первоначально рабочий тиристорVSKоткрыт, а вспомогательныйVSKзакрыт. В это время конденсатор Ск заряжается через резисторRK(полярность зарядки показана на рис. 17.10). Подадим теперь на вспомогательный тиристорVSKотпирающий его импульс напряжения иуи к от системы управления СУ. Вспомогательный тиристор откроется и конденсатор начнет разряжаться через него и рабочий тиристор (контур цепи, разрядки, отмеченный на рисунке штриховой линией). При этом ток разрядки конденсатора направлен навстречу прямому току рабочего тиристора и последний вык
лючается. После этого конденсатор перезаряжается (заряд обратной полярности) через резистор и открытый вспомогательный тиристор.
Чтобы вновь включить рабочий тиристор, на него необходимо подать импульс напряжения иуп от системы управления. При этом конденсатор своим током разрядки выключает вспомогательный тиристор, тот же контур разрядки, но ток обратного направления, а конденсатор еще раз перезаряжается (возвращается полярность, показанная на рисунке).
Следующий цикл начинается с подачи импульса напряжения иуп к от системы управления на вспомогательный тиристор.
Эквивалентное сопротивление цепи ротора зависит от отношения интервалов времени открытого и закрытого состояний рабочего тиристора. Изменяя это отношение, можно регулировать среднее значение тока ротора и, следовательно, момент, развиваемый асинхронным двигателем.
Одним из перспективных способов регулирования частоты вращения асинхронных двигателей является изменение частоты напряжения на обмотках статора. Для этой цели широко применяются автономные инверторы на основе тиристоров, т.е. устройства преобразования постоянного напряжения в переменное с любым числом фаз. Например, управление частотой вращения двухфазных (см. рис. 14.34) и однофазных (см. рис. 14.36) асинхронных двигателей возможно на основе однофазного автономного инвертора по схеме на рис. 10.55.
Инвертирование постоянного напряжения в трехфазную или многофазную систему напряжений осуществляется аналогично. Обычно в инверторе вместо источника с постоянной ЭДС Е используются выпрямленное напряжение сети переменного тока. Применение для этой цели управляемого выпрямителя (см. рис. 10.48) дает дополнительные возможности управления асинхронным двигателем.
Устройства, содержащие и управляемые выпрямители, и инверторы, принято называть тиристорными преобразователями. Иногда в электроприводе применяются и более сложные тиристорные преобразователи, например выпрямитель — инвертор — выпрямитель.
Применение различных способов управления позволяет плавно и экономично регулировать частоту вращения асинхронных двигателей в диапазоне до 50:1 и выше.
Электропривод постоянного тока. Если необходимо регулировать частоту вращения двигателя постоянного тока и получить специальные характеристики, то в настоящее время широко применяются тиристорные преобразователи для подключения двигателя к сети переменного тока.
Схема подключения двигателя постоянного тока с независимым возбуждением (см. рис. 13.7) к сети с однофазным синусоидальным
гшс
V V V
СУ
Рис. 17.12
напряжением и = Umsmut(рис. 17.11) полностью аналогична рассмотренной выше схеме зарядки аккумулятора (см. рис. 10.51).
| Еа |
Пренебрегая сопротивлением цепи якоря, полагая индуктивность сглаживающего фильтра —> оо и учитывая регулировочную характеристику управляемого выпрямителя (10.15), определим постоянную ЭДС якоря:
2Um
- cos а,
где а — угол управления включением тиристоров.
Изменяя угол а с помощью системы управления СУ, можно изменять ЭДС якоря, а следовательно, его частоту вращения [см. (13.1)] при постоянном токе возбуждения 1В.
|
Рис. 17.11 |

| }А о В о С к* X.® L* |
| ^--- ^^Л^о»^------ ^ |
Одна из простейших схем включения двигателя постоянного тока с независимым возбуждением в трехфазную сеть приведена на рис. 17.12. Система управления включает тиристоры в порядке чередования фаз.
ГЛАВА 18 ЭЛЕКТРОБЕЗОПАСНОСТЬ
Общие сведения
Производительность труда во многих областях человеческой деятельности в значительной степени определяется его электровооруженностью. При постоянном росте электровооруженности труда важное значение приобретают вопросы электробезопасности как в производственных, так и в бытовых условиях. Статистика показывает, что среди смертельных несчастных случаев на долю электротравм приходится в среднем по стране около 12 %, а в отдельных отраслях — до 30 %, хотя число всех электротравм относительно общего числа несчастных случаев сравнительно невелико — до 3 %.
Человек начинает ощущать действие тока, начиная с 0,6 —1,5 мА, а при токе 10 — 15 мА не может самостоятельно разорвать цепь поражающего его тока. Ток 50 — 60 мА поражает органы дыхания и сердечно-сосудистую систему.
При напряжениях до 250 — 300 В постоянный ток безопаснее переменного тока частотой 50 Гц. В диапазоне напряжений 400 — 600 В опасность постоянного и переменного токов практически одинакова, а при напряжении более 600 В постоянный ток опаснее переменного.
Дата добавления: 2018-02-28; просмотров: 8140; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!