Уравнение движения электропривода
Для проектирования электропривода необходимо знать кинематику и эксплуатационные условия рабочей машины. Нагрузка на валу электродвигателя слагается из статической и динамической нагрузок. Первая обусловливается полезными и вредными сопротивлениями движению (от сил трения, резания, веса и т.п.); вторая возникает при изменениях кинетической энергии в системе привода вследствие изменения скорости движения тех или иных частей устройства. В соответствии с этим момент, развиваемый двигателем,
мдв = Мст + Мдин = Мст + Jdu/dt. (17.1)
Различают активный и реактивный статические моменты Мст. Первые создаются внешними по отношению к двигателю источниками механической энергии и не зависят от направления и частоты вращения вала двигателя. Вторые возникают в качестве реакции на движущий момент двигателя и зависят от направления и частоты вращения его вала. Примером активного момента может служить момент силы тяжести М = mgr поднимаемого или опускаемого груза массой т (рис. 17.2, а), реактивного момента — момент резания М = Frпри п> 0 и М = 0 при п< 0, гдеF =const — усилие резания (рис. 17.2, б).
Входящая в уравнение моментов (17.1) величина
Мдин = Jdu/dt (17.2)
называется динамическим моментом. Этот момент может быть как положительным, так и отрицательным.
Величина J, которой Мдин пропорционален, называется моментом инерции. Это — взятая для всего тела сумма произведений масс тк
|
|
|
™9i
Рис. 17.2
отдельных частиц тела на квадрат расстояния гк соответствующей частицы от оси вращения:
^ = (17.3)
к=1
Обычно момент инерции выражают как произведение массы тела на квадрат радиуса инерции гин, т.е.
п
J = J2mkrk =™гш> (17.4)
к=1
гДе ^ин — расстояние от оси вращения, на котором нужно сосредоточить в одной точке всю массу тела, чтобы получить момент инерции, равный фактическому при распределенной массе. Радиусы инерции простейших тел указываются в справочных таблицах. Моменты инерции роторов и якорей электродвигателей обычно указываются в каталогах.
В большом числе случаев рабочий орган должен иметь относительно небольшую частоту вращения (50 — 300 мин-1) при высокоскоростном электродвигателе. Изготовлять специальный тихоходный электродвигатель невыгодно. Он будет иметь слишком большие габариты и массу. Рациональнее с тихоходным приводом соединить через редуктор нормальный электродвигатель (750 — 3000 мин-1).
|
|
| М |
| М |
Но при расчетах сложной системы привода с вращательными или поступательными движениями и различными скоростями отдельных ее элементов целесообразно заменить ее приведенной системой — упрощенной системой, состоящей из одного элемента, вращающегося с частотой электродвигателя. При переходе к приведенной системе от действительной моменты в системе = пересчитываются таким образом, чтобы остались неизменными энергетические условия. Рис. 17.3
|
|
|
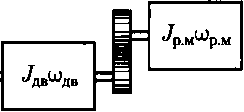
Например, пусть двигатель, угловая скорость вала которого иэдв, соединен через одноступенчатую зубчатую передачу с рабочей машиной (рис. 17.3), угловая скорость которой оорм. Если пренебречь потерями в передаче (они учитываются в приведенной системе), то из условия неизменности мощности следует
Мстидв = Мр.мир.м
или
Кг = М>.мШр.м/Чв = Мр.мАпер> (17.5)
где Мст — искомый статический момент рабочей машины, приведенный к валу двигателя (т.е. угловой скорости вала двигателя); Мрм — действительный статический момент рабочей машины на ее валу; ^пер = ^дв/^р.м ~~ передаточное число от двигателя к рабочей машине.
Если рабочий орган под действием силыFpм выполняет не вращательные, а поступательные движения со скоростьюvpм, то на основании неизменности мощности
|
|
|
-^ст^дв -^р.м^р.м
и, следовательно, искомый приведенный статический момент
мст = Fp.mvMb. (17.6)
В приведенной системе должны быть представлены и приведенные моменты инерции.
Приведенный момент инерции системы — это момент инерции системы, состоящей только из элементов, вращающихся с угловой скоростью вала двигателя и;дв, но обладающих запасом кинетической энергии, равным запасу кинетической энергии действительной системы. Из условия неизменности кинетической энергии следует, что для системы, состоящей из соединенных через одну зубчатую передачу двигателя и вращающейся с угловой скоростьюujp м рабочей машины, у которой момент инерции Jp м,
JnAJ2 = Ы/2 + Jp.m^.M/2 (17.7)
или искомый приведенный момент инерции системы
Jn р =</дв + ^р.мС^р.мЛ^дв)2 — Jj{ в + ^р.м/^пср- (17.8)
Таким образом, для сложного привода в уравнении (17.1) подразумевается приведенное значение статического момента инерции. Если известны момент М} Н-м, и частота вращения п} мин"1, то соответствующая мощность, кВт, равна
Р = Мп/9550, (17.9)
где коэффициент 9550 = 60 103/2 [Н м мин_1/кВт].
Дата добавления: 2018-02-28; просмотров: 876; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!