Рабочие характеристики асинхронного двигателя
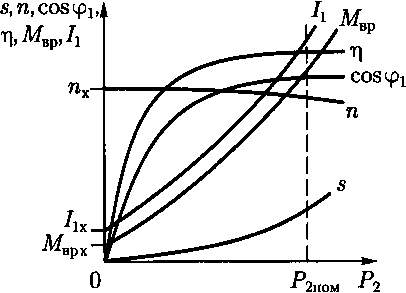
Механическая характеристика наглядно показывает свойства асинхронного двигателя как части электропривода. Но для более полного выявления свойств самого двигателя служат его рабочие характеристики — так принято называть зависимости от полезной мощности Р2 двигателя на валу частоты вращения п, вращающего момента Мвр, коэффициента мощности cos^ и КПД г\ = Р2/Л- Все рабочие характеристики снимаются при номинальных частоте сети /и напряжении между выводами статораUx= С/1ном.
Так как Р2 « Рмсх, а Рмех = Мврыр, то зависимость п(Р2) — скоростная характеристика — мало отличается по форме от механической характеристики двигателя п(Мвр). Она тоже может быть названа жесткой (рис. 14.24), при этом скольжениеs(p2) = (пх - п)/пх.
Вращающий момент Мвр, развиваемый двигателем, складывается из полезного момента Мъ (преодоления нагрузки на валу двигателя) и момента холостого хода Мх. Последний покрывает механические потери двигателя. Этот момент можно приближенно считать не зависящим от нагрузки двигателя. Полезный момент М2 = Р2/ир; если бы скорость и;р была строго постоянна, то зависимость М2(Р2) была бы линейна, но скорость двигателя немного уменьшается с увеличением Ръ поэтому график зависимости М2(Р2) немного отклоняется вверх. Соответственно график вращающего момента Мвр(Р2), складывающегося из момента холостого хода и полезного момента, пересекает ось ординат в точке, соответствующей Мх, а затем он почти прямолинеен и лишь немного изгибается вверх. Аналогична зависимостьIi(P2).
|
|
|
|
Рис. 14.24 |
Что касается зависимости cos^p! двигателя от нагрузки, то его изменения обусловлены следующими соотношениями. Намагничивающий ток двигателя мало зависит от нагрузки, так как ее увеличение вызывает лишь возрастание потокосцеплений рассеяния, пропорциональных токам в обмотках статора и ротора, а главный магнитный поток машины при возрастании нагрузки незначительно уменьшается.
Но активный ток двигателя пропорционален его механической нагрузке. Таким образом, с увеличением нагрузки двигателя относительное значение реактивного тока быстро убывает и со8фх увеличивается. При холостом ходе двигателя его коэффициент мощности довольно низок — примерно 0,2. С увеличением нагрузки он быстро возрастает и достигает максимального значения (0,8 — 0,95) при нагрузке, близкой к номинальной. Таким образом, даже у полностью загруженного двигателя реактивный ток составляет 60 — 30 % тока статора.
Неполная загруженность асинхронных двигателей — это одна из главных причин низкого coscp промышленных предприятий. Естественным способом повышения cos ф является полная загрузка асинхронных двигателей. Главный магнитный поток двигателя пропорционален напряжению питающей сети [см. (14.116)]. Намагничивающий ток, возбуждающий этот поток, при заданном значении потока обратно пропорционален магнитному сопротивлению на пути потока. В этом магнитном сопротивлении большую часть составляет сопротивление воздушного зазора между статором и ротором. По этой причине конструктор стремится уменьшить этот зазор до минимума, определяемого условиями подвижности в подшипниках и необходимым запасом на их износ, прогибом вала и точностью центровки. С увеличением номинальной мощности двигателя необходимый воздушный зазор возрастает значительно медленнее этой мощности, благодаря чему с повышением номинальной мощности двигателя его со8фх увеличивается. С уменьшением номинальной частоты вращения двигателя увеличивается его магнитный поток, так как при меньшей частоте вращения он индуктирует в фазной обмотке статора меньшую ЭДС. Следовательно, у тихоходных двигателей намагничивающий ток относительно больше, а со8фх существенно меньше.
|
|
|
Коэффициент полезного действия определяется отношением полезной мощности на валу Р2 к мощности Рь определяющей потребление двигателем энергии из сети:
|
|
|
Л = Р2/Р1.
Мощность Рх равна сумме полезной мощности и мощности всех потерь в двигателе:
— + ^иот-
Мощность всех потерь в двигателе можно разделить на постоянную составляющую, практически не зависящую от нагрузки, и переменную составляющую, зависящую от нее.
Мощностью постоянных потерь в двигателе можно считать мощность потерь в сердечнике статора из-за гистерезиса и вихревых токов и мощность механических потерь, которая определяется экспериментально из опыта холостого хода двигателя.
Мощность переменных потерь в двигателе равна мощности потерь на нагревание проводов обмоток статора и ротора:
РЦ pi — ЗДв1/х, Р„ Р2 = тп2Дв чЦ.
Максимального значения (65 — 95 %) КПД достигает, если переменные потери равны постоянным (см. 9.9). У большинства двигателей этот максимум КПД имеет место примерно при нагрузке, равной 75 % номинальной, так как двигатели проектируются с учетом того обстоятельства, что далеко не всегда они полностью загружены.
Дата добавления: 2018-02-28; просмотров: 429; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!