Программируемые устройства. Микропроцессоры
Программируемые цифровые и логические устройства представляют собой универсальные технические средства для создания электронных устройств различного назначения.
Они основаны на применении арифметико-логического устройства (АЛУ), выполняющего арифметические и логические операции над входными величинами А и В в двоичном коде в зависимости от сигналов на управляющих входах М, S0, Si, S2, S3, и на переносе
|
а б в Рис. 10.123 |

Р0 из внешних цепей (рис. 10.124,а). Результат операции определяется совокупностью сигналов на выходахFи переноса Р4 из старшего разряда. При М = 0 выполняются арифметические (сложение А и В, сложение А и В с добавлением Р0_в младший разряд и т.д.), а при М = 1 — логические (F =A, F = В и т.д.) операции. Комбинация сигналов S0... определяет, какая именно операция выполняется.
Несмотря на разнообразие операций, выполняемых АЛУ, им присущи недостатки: отсутствуют операции умножения, деления и т.д. Эта ограниченность преодолена в микропроцессорах.
Микропроцессор (МП) — это информационное устройство, которое по программе, задаваемой управляющими сигналами, обрабатывает информацию, т. е. реализует операции: арифметические, логические, ввода, вывода и т.д.

| РОН |
| — | Ро | АЛУ | ||
| — | А, | |||
| — | а2 | |||
| —— | А3 а4 | — | ||
| --- | Вг в2 | f2 | — | |
| в3 в4 | F3 | — | ||
| — | М | f4 | — | |
| — | Sa | |||
| — | Si | |||
| — | S2 | |||
| — | Sz |
Упрощенная структурная схема одного из МП (рис. 10.124, б) состоит из АЛУ и совокупности п параллельных регистров по га разрядов общего назначения (РОН) дня хранения двоичных чисел, ис
пользуемых в процессе вычислений. В состав МП входят также два параллельных буферных регистра (БР), предназначенных для кратковременного хранения чисел АиВво время выполнения операции АЛУ, и устройство управления (УУ), которое задает режимы работы всех элементов МП.
|
|
|
При работе МП числа А и В, над которыми выполняется операция, передаются по магистрали последовательно из РОН на буферные регистры БРА и БРД Затем по команде АЛУ производит указанную операцию, а результат ее по внутренней магистрали передается в РОН. Обычно для этой цели выделяется специальный регистр РОН, называемый аккумулятором, в котором ранее записанное число стирается. Например, сложение трех чисел выполняется таким образом: сначала складываются два первых числа и результат записывается в РОН. Затем в АЛУ поступают результат этого сложения и третье число, вычисляется окончательный результат и записывается в РОН.
|
|
|
Последовательность выполнения операций практически не ограничивает функциональные возможности МП. Однако эффективность применения МП значительно возрастает, если его снабдить дополнительными устройствами для хранения информации и обмена ею с внешними устройствами.
МикроЭВМ — это устройства на основе МП, а также запоминающих устройств (ЗУ), устройств управления и средств связи с периферийными устройствами (интерфейс). Управляющая микроЭВМ должна иметь средства сопряжения с объектом управления: датчики, АЦП, ЦАП. Совокупность микроЭВМ и средств сопряжения образует микропроцессорную систему.
Структурная схема микроЭВМ (рис. 10.125) содержит устройства ввода (УВв) и вывода (УВыв), порты ввода и вывода, центральный МП с АЛУ, устройством управления и регистрами общего назначения, а также постоянные (ПЗУ) и оперативные (ОЗУ) запоминающие устройства.
В качестве УВв служат магнитные головки, телетайпы, АЦП: в качестве УВыв — дисплеи, печатающие устройства, ЦАП и т. п. Порты ввода и вывода предназначены для кратковременного хранения информации в процессе ввода, вывода и переключения каналов.
|
|
|
Входная информация делится на данные, над которыми выполняются операции, и программу, т. е. последовательность команд, описывающих выполняемые операции. Данные и программа задаются совокупностью слов разной длины в виде двоичных чисел с числом разрядов, кратным 8(1 байт).
Данные УВв поступают в порт ввода. Сигналы управления выбирают необходимый порт, обеспечивают запись данных, временное хранение в порте, а затем их передачу в магистраль данных, состоящих из совокупности т проводящих линий, обеспечивающих передачу га-разрядного слова. При магистральной организации связей
«а =!>
| Адреса Шк |
| МА / |
| 5L |
| не: Порт ввода |
| за ЗУ |
| Порт вывода |
| ГТС |
| УВв |
| МП |
| УВыв |
| ОЗУ |
| ПЗУ |
Л- о —М
|
|
| ft < Я |
| МД |
Данные
|
|
| МУ |
WZZZZ2ZZZZ
хчччЧЧЧ\УЧЧЧЧЧЧ\ЧЧЧУЧЧЧУЧЧЧЧЧЧ
Команды в МП представляются в виде многоразрядных двоичных слов, например команда «Послать в РОН содержимое ячейки памяти с номером 15488» выглядит так:
РОИ 1010 ООН 110Q 1000 0000, 1 2 3
где первый байт — это код операции, содержимое второго и третьего байтов — код номера ячейки памяти (15 488 в двоичном коде).
Записи программ проще на языке Ассемблер, который допускает запись команд с клавиатуры или перфоленты в форме, отражающей их смысловое содержание. Например, команда ADD — сложение, MOV — передача данных и т. п. Перевод языка Ассемблер на язык двоичных кодов производится специальной программой, которая размещается, например, в ПЗУ микроЭВМ.
|
|
|
Аналогично можно применять для программирования на микроЭВМ языки высокого уровня: ФОРТРАН, ПЛ и др. При этом, однако, упрощение программирования сопровождается увеличением времени трансляции и необходимого объема памяти машины. Для управляющих микроЭВМ, встроенных в различные устройства и работающих в реальном масштабе времени, такое программирование, как правило, неприемлемо.
ГЛАВА И
ЭЛЕКТРОВАКУУМНЫЕ ПРИБОРЫ И УСТРОЙСТВА
11.1. Общие сведения об электровакуумных электронных
приборах
Различают электронные и газоразрядные электровакуумные приборы.
Электронными называют приборы, в которых ток представляет собой движение электронов практически в вакууме (Ю-5—10~4 Па), причем их движение происходит без столкновений с молекулами газа (при указанных разрежениях 108—109 молекул в 1 см3).
Газоразрядными называют приборы с электрическим разрядом в газе или парах металлов. Эти приборы и основные процессы в них будут рассмотрены в дальнейшем.
К электронным приборам относятся: электронные лампы — диоды, триоды, пентоды и пр.; электронно-лучевые приборы — кинескопы, телевизионные, осциллографические и запоминающие трубки и пр.; электронные сверхвысокочастотные приборы — клистроны, магнетроны и др.
Для создания внутри прибора между электродами (в вакууме) потока электронов необходима электронная эмиссия. Так принято называть выход свободных электронов в вакуум или в газ из твердых или жидких материалов. Работа выхода, например, для платины 5,32 эВ, вольфрама 4,60 эВ, ртути 4,52 эВ, меди 4,26 эВ, тория 3,35 эВ, цезия 1,81 эВ.
В зависимости от того, как получает материал эту энергию, различают следующие виды электронной эмиссии: термоэлектронную, вторичную электронную, фотоэлектронную и автоэлектронную. В электронных лампах, электронно-лучевых приборах и большинстве других электровакуумных приборов используется явлениетермоэлектронной эмиссии — испускание электронов телом при нагревании.
11.2. Электровакуумные электронные лампы и индикаторы
Диод по своему устройству — простейшая из электронных ламп. Его основные части (рис. 11.1): стеклянный (или металлический) баллон, откачанный до высокого вакуума, и два электрода — анод и катод, помещенные внутри баллона. Катод (К) прямого накала у электронных ламп представляют собой металлическую нить (проволоку), форма которой зависит от конструкции данного прибора. Она закрепляется держателями или натягивается одной или несколькими пружинами. Никелевый или молибденовый анод (А) имеет цилиндрическую или коробчатую форму и охватывает катод.
Катод прямого канала обычно нагревается постоянным током от источника низкого напряжения (2 — 30 В). Использование для этой цели переменного тока промышленной частоты 50 Гц может вызвать изменение температуры катода, а следовательно, и тока в диоде с удвоенной частотой (см. рис. 2.29, а), что в некоторых случаях недопустимо. От этого недостатка свободны подогревные катоды, в которых нить подогревателя отделена от катода изолирующим на- гревостойким материалом.
Чтобы направить эмиттированные катодом электроны к аноду, необходимо создать между катодом и анодом электрическое поле, направленное от анода к катоду. В простейшем случае для этой цели может служить аккумуляторная батарея напряжением 20 — 100 В. Отрицательный полюс батареи должен быть соединен с катодом, положительный полюс — с анодом. Под действием сил электрического поля эмиттируемые катодом электроны движутся к аноду, образуя ток в вакуумном промежутке.
На рис. 11.2 показаны вольт-амперные характеристики диода — зависимость анодного тока 1А от напряженияUAмежду анодом и катодом при разных токах накала /иак.
Основными параметрами электровакуумных диодов, так же как и полупроводниковых диодов (см. 10.3), служат допустимые прямое напряжение С/пр и прямой ток /пр, обратное напряжение £/0г>р и обратный ток /обр.
Основным назначением электровакуумных диодов является выпрямление переменного тока. В зависимости от назначения электровакуумные диоды делятся на две группы: кенотроны — электровакуумные диоды большой мощности, предназначены для работы в
|
|

выпрямителях источников питания; детекторные диоды — электровакуумные приборы малой мощности, предназначены для работы в выпрямителях переменного тока высокой частоты, в том числе при детектировании радиосигналов.
Трехэлектродная лампа — триод — отличается от диода тем, что между катодом и анодом находится промежуточный электрод — управляющая сетка С. Название объясняется тем, что в первых электровакуумных триодах и в настоящее время в триодах большой мощности этот электрод выполняется в виде металлической сетки. В современных лампах сетка выполняется в виде проволочной спирали. Посредством малого изменения напряжения между управляющей сеткой и катодом можно получить значительное изменение потока электронов между катодом и анодом, т. е. анодного тока. Усилительное действие управляющей сетки объясняется тем, что она расположена значительно ближе к катоду, чем анод, и частично экранирует катод от действия электрического поля анода.
Электровакуумный триод может быть включен по схеме с общим катодом, с общим анодом и с общей сеткой аналогично трем схемам полупроводникового транзистора. Однако наибольшее практическое распространение имеет схема включения электровакуумного триода с общим катодом (рис. 11.3), подобная схеме включения транзистора с ОЭ (см. рис. 10.62).
К основным достоинствам электровакуумного триода, так же как и других электровакуумных приборов, относится большая стабильность их параметров к внешним воздействиям (в первую очередь температуре), чем у функционально аналогичных полупроводниковых приборов.
Для уменьшения связи между цепями управления и нагрузки через емкость между анодом и управляющей сеткой и ослабления действия других нежелательных явлений применяются тетроды и пентоды.
Тетрод — это четырехэлектродная электронная лампа, которая отличается от электровакуумного триода наличием экранирующей сетки, конструктивно расположенной между анодом и управляющей
|
|

|
О 100 200 300 иА, В Рис. 11.5 |

| 1/ |
/I
/ U / I
Рис. 11.6
|
|
сеткой (рис. 11.4). Напряжение между экранирующей сеткой и катодом иэ поддерживается неизменным и равным 15 — 100% номинального значения анодного напряженияUA.
В отличие от тетрода пентод имеет третью сетку, расположенную между экранирующей сеткой и анодом. Обычно эта сетка соединяется непосредственно с катодом (рис. 11.5).
Включение тетрода и пентода в цепь усилителя аналогично включению электровакуумного триода.
Электровакуумные индикаторы содержат последовательно расположенные один за другим катод, управляющую сетку и несколько анодов (рис. 11.6, а). Аноды размещаются в одной плоскости и выполняются в виде совокупности знакосинтезирующих элементов, покрытых люминофором и имеющих отдельные выводы. При положительном относительно катода потенциале управляющей сетки электроны попадают на те элементы анода, к которым приложено положительное относительно катода напряжение (рис. 11.6, б), вызывая свечение люминофора.
11.3. Общие сведения об электровакуумных газоразрядных приборах
Разреженный газ, наполняющий предварительно откачанный до вакуума баллон прибора, при ионизации значительно уменьшает электрическое сопротивление промежутка между электродами в баллоне, что и используется в газоразрядных приборах.
Давление газа (или паров ртути) в баллоне прибора должно быть мало — в большинстве приборов порядка 10"1 —103 Па. Это необходимо для того, чтобы средний свободный (т. е. без столкновений) пробег электронов в таком разреженном газе был достаточно большим. При таком пробеге даже при невысоких напряженностях электрического поля электроны приобретают энергию, необходимую для не
упругого взаимодействия с атомами или молекулами газа или пара. При таком взаимодействии в отличие от упругого происходят возбуждение и ионизация атомов газа или паров, т.е. создаются дополнительные свободные электроны и положительные ионы.
Скорость движения электронов во много раз больше скорости движения относительно тяжелых положительных ионов; поэтому и в газоразрядных приборах основными носителями тока остаются свободные электроны Доля тока, образуемого движением положительных ионов, составляет обычно менее одной десятой общего тока через разрядный промежуток. Полезная роль положительных ионов заключается в том, что их заряды нейтрализуют объемный отрицательный заряд электронов. В разрядном промежутке образуется плазма — среда, для которой характерна высокая концентрация одинакового числа зарядов обоих знаков (примерно 109—1012 пар зарядов в 1 см3). Проводимость газовой плазмы близка к проводимости металлов, благодаря чему в газоразрядном приборе ток может достигать больших значений при малом напряжении между электродами.
Вследствие ионного характера проводимости процессы в приборе инерционные, что существенно отличает газоразрядные приборы от электронных. После снятия анодного напряжения часть ионов и электронов в баллоне в течение времени деионизации рекомбини- рует, т.е. соединяется в нейтральные атомы газа у стенок баллона. Задержка деионизации делает газоразрядные приборы непригодными для работы в цепях токов высокой частоты.
Электрический разряд в газах может быть несамостоятельным и самостоятельным. Для возникновения и поддержки несамостоятельного разряда необходим вспомогательный источник энергии, создающий носители зарядов в газовой среде, — так называемый ионизатор. Например, несамостоятельный разряд возникает в результате термоэлектронной эмиссии нагреваемого катода. Для возникновения и поддержания самостоятельного разряда требуется только электрическое поле в газоразрядном промежутке.
В газоразрядных приборах может быть разряд двух видов: дуговой и тлеющий.
11.4. Приборы дугового разряда
Мощность цепи нагрузки газоразрядного прибора дугового разряда при равных габаритах в несколько раз больше, чем электронного. По этой причине практически управляемые приборы дугового разряда могут служить для непосредственного управления различного рода исполнительными механизмами.
Несамостоятельный дуговой разряд имеет место в газотроне и тиратроне, самостоятельный дуговой разряд — в игнитроне и ртутном
вентиле. Последние применяются в выпрямительных устройствах большой мощности.
По устройству тиратрон — это триод, баллон которого заполнен сильно разреженным инертным газом или парами ртути. Условное обозначение тиратрона и его вольт-амперные характеристики показаны на рис. 11.7. В основном своем варианте тиратрон — прибор с подогревным катодом и несамостоятельным дуговым разрядом. Этот разряд возникает при определенном значении анодного напряжения — напряжении зажигания U3.Напряжение зажигания тиратрона можно регулировать изменением напряжения между управляющей сеткой и катодом.
Отрицательный потенциал управляющей сетки относительно катода повышает напряжение зажигания, а положительный понижает. Пока тиратрон не зажегся, анодный ток /А относительно мал. При зажигании тиратрона начинается ионизация газа. Как только в приборе устанавливается дуговой разряд, напряжение управляющей сетки перестает влиять на значение анодного тока. Положительные ионы газа обволакивает управляющую сетку и компенсируют ее отрицательный заряд.
|
Рис. 11.7 |

Вольт-амперные характеристики тиратрона (рис. 11.7) подобны вольт-амперным характеристикам тиристора (см. рис. 10.26, а). Это определяет и общность их применения в качестве управляемых бесконтактных ключей.
|
|
Тлеющий разряд используется в газоразрядных приборах малой мощности. Несамостоятельный тлеющий разряд имеет место в газоразрядном стабилитроне, самостоятельный тлеющий разряд — в декатроне. Декатрон представляет собой многоэлектродный переключающий прибор для коммутации малых токов.
| 11.5. Приборы тлеющего разряда 7 |
| г мА 40- 30- 20- 10- |
| 50 |
| 100 |
| Рис. 11.8 |
Газоразрядный стабилитрон — это двухэлектродный прибор, в котором возникает несамостоятельный тлеющий разряд в среде инертного газа при
термоэлектронной эмиссии катода. На рис. 11.8 показаны условное изображение газоразрядного стабилитрона и его типовая вольт-амперная характеристика. Газоразрядный стабилитрон применяется для стабилизации напряжения в электрических цепях подобно полупроводниковому стабилитрону (см. рис. 10.13, б).
11.6. Электровакуумные фотоэлектронные приборы
В электровакуумных фотоэлектронных приборах используется явление фотоэлектронной эмиссии, которое заключается в том, что при облучении тела потоком энергии излучения (поток света) оно может испускать во внешнюю среду электроны. В электровакуумных фотоэлектронных приборах (фотоэлементах и фотоэлектронных умножителях) для этой цели служит фотокатод.
Фотоэлементом называется прибор, электрические свойства которого изменяются под действием падающего на фотокатод излучения. Электроды фотоэлемента — анод и катод — помещены в стеклянный баллон. В зависимости от степени разрежения газа в баллоне различают электронные (давление Ю-5— Ю-4 Па) и газоразрядные (давление 10"[12] —10~3 Па) электровакуумные фотоэлементы. Фотокатодом служит слой щелочноземельного металла, нанесенного на подложку из серебра. Последняя осаждена непосредственно на внутренней стороне стекла баллона и соединена с соответствующим выводом. Покрытая серебром большая часть баллона образует с внешней стороны характерную зеркальную поверхность. В последней оставлено оконце для светового потока, направленного внутрь баллона на активную поверхность фотокатода. Анод выполняется часто в виде проволочного кольца, помещенного перед катодом (рис. 11.9). Чтобы получать ток в фотоэлементе, нужно воздействовать на освобождаемые светом электроны электрическим полем, т. е. необходим источник постоянного анодного напряжения.
|
|
| Ф2 | |||
| [ | Ф2: | > Фг | |
| г |
| 20 10 |
| 20 40 60С/А,Ва |
| /,мА 100 г |
| 75 50 25 |
| Z |

| I, мА 30 г |
| Вывод катода Оконце Катод |
| Анод Вывод анода |
| UA=const |
Z1
Вольт-амперная характеристикаI( UA) электронного фотоэлемента (рис. 11.10, а) напоминает вольт-амперную характеристику электровакуумного диода (см. рис. 11.2). Сначала, при малых значениях анодного напряжения, ток I растет вместе с увеличением анодного напряжения. При некоторой освещенности фотокатода все электроны эмиссии достигают анода (ток насыщения), при дальнейшем повышении анодного напряжения ток фотоэлемента практически не изменяется. Ток насыщения зависит лишь от фотоэлектронной эмиссии, а следовательно, только от освещенности фотокатода. Это — ценное качество электронного фотоэлемента. Зависимость тока насыщения от светового потока Ф — световая характеристика электронного фотоэлемента — линейна (рис. 11.10, б), что является следствием закона Столетова.
Чувствительность фотоэлемента определяется отношением изменения его тока насыщения к изменению светового потока:S = = dljdФ, она относительно мала (20 — 80 мкА/лм). Чувствительность можно увеличить, если после откачки в баллон ввести сильно разреженный инертный газ. При работе такого газоразрядного фотоэлемента электроны эмиссии ионизируют газ и поток электронов от катода к аноду усиливается. Газовое наполнение увеличивает чувствительность фотоэлемента примерно в 5 раз.
К недостаткам газоразрядных фотоэлементов следует отнести нелинейность световой характеристики и некоторую инерционность при работе, в то время как электронный фотоэлемент практически безынерционен.
Даже при газовом наполнении ток фотоэлементов в большинстве случаев недостаточен для приведения в действие исполнительных механизмов, поэтому фотоэлементы часто применяются с ламповыми или полупроводниковыми (рис. 11.11) усилителями. Пока фотоэлемент не освещен, транзистор находится в закрытом состоянии под действием ЭДС ЕБ в цепи базы. При освещении фотоэлемента база соединяется с положительным полюсом ЭДС Ек, поэтому напряжение между базой и эмиттером становится положительным, транзистор открывается и ток коллектора возрастает до значения, достаточного для срабатывания исполнительного механизма ИМ.
|
|

Фотоэлектронным умножителем называется прибор, в котором ток фотоэлектронной эмиссии усиливается посредством вторичной электронной эмиссии. Поток электронов, освобождаемых под действием света фотокатодом К, электрическим, как на рис. 11.12 (или магнитным), полем направляется последовательно на ряд динодов — вспомогательных электродов. После каждого динода поток электронов увеличивается, так как добавляются вторичные электроны динода, освобождаемые ударами электронного потока. Таким образом, вследствие многократной вторичной эмиссии поток электронов у анода А оказывается во много раз больше потока фотоэлектронной эмиссии катода. Благодаря такому внутреннему усилению чувствительность фотоэлектронных умножителей чрезвычайно высока и достигает 1 — 10 А/лм. Однако не следует думать, что фотоэлектронные умножители рассчитаны на большие анодные токи — эти токи не превышают 10 — 15 мА. Их главная область применения — измерение силы света при очень малых освещенностях.
ГЛАВА 12 ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ
12.1. Общие сведения
Объектами электрических измерений являются все электрические и магнитные величины: ток, напряжение, магнитный поток и т. д.
Электроизмерительные устройства широко применяются и для измерения неэлектрических величин (температуры, давления и т. д.), которые для этой цели преобразуются в пропорциональные им электрические величины. Такие методы измерений известны под общим названием электрических измерений неэлектрических величин. Применение электрических методов измерений дает возможность относительно просто передавать показания приборов на дальние расстояния (телеизмерение), управлять машинами и аппаратами (автоматическое регулирование), выполнять автоматически математические операции над измеряемыми величинами, записывать (например, на ленту) ход контролируемых процессов и т.д.
По типу отсчетного устройства различают аналоговые и цифровые приборы. В аналоговых приборах измеряемая или пропорциональная ей величина непосредственно воздействует на положение подвижной части, на которой расположено отсчетное устройство. В цифровых приборах подвижная часть отсутствует, а измеряемая или пропорциональная ей величина преобразуется в числовой эквивалент, регистрируемый цифровым индикатором. Микропроцессоры позволяют существенно повысить производительность и точность измерительных приборов, придавая им дополнительные функции обработки результатов измерений.
Для исследования сложных объектов применяются автоматические измерительные системы, представляющие собой совокупность датчиков, измерительных и регистрирующих приборов, устройств их сопряжения (интерфейс) и управления.
12.2. Меры, измерительные приборы и методы измерения
Измерение любой физической величины заключается в ее сравнении посредством физического эксперимента с принятым за единицу значением соответствующей физической величины, называемой мерой. Такое сравнение возможно с помощью либо прибора сравнения, либо прибора непосредственного отсчета, называемого также показывающим прибором. В последнем случае измеряемая величина определяется по шкале прибора, для градуировки которой необходима мера.
В зависимости от того, как получаются результаты измерения, различают измерения прямые, косвенные и совокупные.
Если результат измерения непосредственно дает искомое значение исследуемой величины, то такое измерение принадлежит к числу прямых, например измерение тока амперметром.
Если измеряемую величину приходится определять на основании прямых измерений других физических величин, с которыми измеряемая величина связана определенной зависимостью, то измерение относится к косвенным, как, например, измерение сопротивления элемента электрической цепи при измерении напряжения вольтметром и тока амперметром. Следует иметь в виду, что при косвенном измерении возможно существенное снижение точности по сравнению с точностью при прямом измерении из-за сложения погрешностей прямых измерений величин, входящих в расчетные уравнения.
В ряде случаев конечный результат измерения выводится из результатов нескольких групп прямых или косвенных измерений отдельных величин, от которых зависит исследуемая величина. Такое измерение называют совокупным. Например, к совокупным измерениям относится определение температурного коэффициента электрического сопротивления материала на основании измерения сопротивления материала при различных температурах.
В зависимости от способа применения приборов и мер принято различать следующие основные методы измерения: непосредственный, нулевой и дифференциальный.
При пользовании методом непосредственного измерения (или непосредственного отсчета) измеряемая величина определяется путем непосредственного отсчета показания измерительного прибора или непосредственного сравнения с мерой данной физической величины (измерение тока амперметром, измерение длины метром). В этом случае точность измерения определяется точностью показывающего прибора.
При измерении нулевым методом значение образцовой (известной) величины (или эффект ее действия) регулируется до равенства со значением измеряемой величины (или эффектом ее действия), которое фиксируется измерительным прибором. Прибор должен быть высокой чувствительности, он именуется нулевым при- бором или нуль-индикатором. Точность измерения нулевым методом очень высока и в основном зависит от точности образцовых мер и чувствительности нулевых приборов. Важнейшие среди нулевых методов электрических измерений — мостовые и компенсационные.
Еще большая точность может быть достигнута при дифференциальных методах измерения. В этих случаях измеряемая величина уравновешивается известной величиной не до полного равновесия, а путем прямого отсчета измеряется разность измеряемой и известной величин. Дифференциальные методы применяются для сравнения двух величин, значения которых мало различаются.
12.3. Погрешности измерения и классы точности
Точность измерения характеризуется его возможными погрешностями. Эти погрешности при каждом конкретном измерении не должны превышать некоторого определенного значения. В зависимости от способа числового выражения различают погрешности абсолютные и относительные, а применительно к показывающим приборам — еще и приведенные.
Абсолютная погрешность АА — это разность между измеренным Лиз и действительным А значениями измеряемой величины:
АА = Лиз - А.
Например, амперметр показывает АИЗ = 9 А, а действительное значение тока А = 8,9 А, следовательно, АА = 0,1 А.
Чтобы определить действительное значение величины, нужно к измеренному значению прибавить поправку — абсолютную погрешность, взятую с обратным знаком.
Точность измерения оценивается обычно не абсолютной, а относительной погрешностью — выраженным в процентах отношением абсолютной погрешности к действительному значению измеряемой величины:
Чо = (АЛ/Л)-100%,
а так как разница между Л и Лиз обычно относительно мала, то практически в большинстве случаев можно считать, что ^о = = (ДЛ/ЛИЗ) • 100 %. Для приведенного примера измерения тока относительная погрешность ^о = = (0,1/9)-100% = 1,11%.
|
|

Однако оценивать по относительной погрешности точность показывающих приборов со стрелочным указателем неудобно. Дело в том, что абсолютная погрешность АА у них имеет обычно один и тот же порядок вдоль всей шкалы. При постоянной абсолютной погрешности А А с уменьшением измеряемой
величины Аиз быстро растет относительная погрешность (рис. 12.1). Поэтому рекомендуется выбирать пределы измерения показывающего прибора так, чтобы отсчитывать показания в пределах второй половины шкалы, ближе к ее концу.
Таблица 12.1
Условные обозначения на шкалах электроизмерительных приборов
Прибор трехфазного тока для неравномерной нагрузки фаз
Прибор трехфазного тока с двухэлементным измерительным механизмом
Защита от внешних магнитных полей, например 2 мТл | 2 |
I--- 1
Защита от внешних электрических полей, например 10 кВ/м i 10 i
I__ I
1,5
Класс точности при нормировании погрешности в процентах диапазона измерения, например 1,5
То же, при нормировании погрешности в процентах длины шка- i ,5 лы, например 1,5
Горизонтальное положение шкалы | |
| _60° N |
Вертикальное положение шкалы [
Наклонное положение шкалы под определенным углом к горизонту, например 60°
|
|
Направление ориентировки прибора в магнитном поле Земли
Измерительная цепь изолирована от корпуса и испытана напряжением, например 2 кВ
Прибор испытанию прочности изоляции не подлежит
| t S •к ■к V |
Осторожно! Прочность изоляции измерительной цепи по отношению к корпусу не соответствует нормам (знак выполняется красным цветом).
Для оценки точности самих показывающих измерительных приборов служит их приведенная погрешность. Так называется выраженное в процентах отношение абсолютной погрешности показания АЛ к Дюм — номинальному значению, соответствующему наибольшему показанию прибора:
Ър = (АЛ/Д,ОМ)-100%. (12.1)
Если в рассмотренном примере предел измерения амперметра Аюм = Ю А, то приведенная погрешность чпр = (0,1/10) • 100 % = 1 %.
Погрешности прибора обусловливаются недостатками самого прибора и внешними влияниями. Приведенная погрешность, зависящая лишь от самого прибора, называется основной погрешностью. Нормальные рабочие условия — это температура окружающей среды 20 °С (или та, которая обозначена на шкале прибора), нормальное рабочее положение прибора (указанное условным знаком на его шкале), отсутствие вблизи прибора ферромагнитных масс и внешних магнитных нолей (кроме земного) и прочие нормальные условия (номинальные: напряжение, частота тока, синусоидальная форма кривой тока и т. д.).
Допускаемая основная погрешность электроизмерительного прибора определяет его класс точности. Обозначением класса точности служит допускаемая основная погрешность приборов, принадлежащих к этому классу: 0,05; 0,1; 0,2; 0,5; 1; 1,5; 2,5; 4. Принадлежность прибора к определенному классу указывает, что основная погрешность прибора на всех делениях шкалы не превышает значения, определяемого классом точности этого прибора (например, у прибора класса 1 допускаемая основная погрешность 1 %). Отклонение внешних условий от нормальных вызывает дополнительные погрешности.
В зависимости от чувствительности к внешним магнитным или электрическим полям электроизмерительные приборы делятся на две категории: I — приборы менее чувствительные и II — приборы более чувствительные.
Для правильного применения электроизмерительного прибора важны его технические особенности. Эти особенности указываются на шкале прибора условными обозначениями, приведенными в табл. 12.1.
12.4. Потребление энергии электроизмерительными
приборами
Включение измерительного прибора в исследуемую электрическую цепь в некоторой степени изменяет ее режим работы. Это изменение вызывается тем, что работающий прибор потребляет определенную энергию. Поэтому при исследовании объектов малой мощ-
Рис. 12.3
иости могут существенно исказиться результаты. Желательно, чтобы собственное потребление энергии измерительным прибором было возможно меньше.
Простейшим примером влияния собственного потребления энергии измерительными приборами на результаты измерения служит косвенное измерение сопротивления резистора (при постоянном токе) с помощью вольтметра и амперметра с вычислением по закону Ома. Для такого измерения возможны две схемы включения приборов.
В схеме на рис. 12.2 амперметр изменяет ток / в резисторе с сопротивлениемR, а вольтметр — напряжениеUf= U + RAI, гдеRA— сопротивление амперметра;U — напряжение на резисторе. Следовательно, на основании закона Ома определяется сумма сопротивлений резистора и амперметра:
U'/I = R' = R + ДА.
Действительное значение сопротивления резистора R = R'( 1 - Ra/R').
Очевидно, что ошибка измерения будет тем меньше, чем меньше сопротивление амперметра.
При измерении по схеме на рис. 12.3 вольтметр присоединен непосредственно к выводам резистора и показывает напряжение на резисторе, а амперметр измеряет сумму токов в резисторе и в цепи вольтметра: Г = / + Iv. Таким образом, в этом случае на основании показаний приборов определяется проводимость
а = г/и=G+ Gy = 1/R+ l/i?v,
где i?v— сопротивление вольтметра.
Чтобы определить проводимость объекта измерения — резистора, нужно из найденной проводимости вычесть проводимость вольтметра:
G = G - Gy = G'(l - GY/G'),
т.е.
| Рис. 12.2 |
R = R'( 1 - R'/Ry).
Чем больше сопротивление вольтметра тем меньше поправка к результатам измерения.
При переменном токе учет поправок осложняется тем, что сопротивления цепей переменного тока — комплексные величины.
Чем меньше мощности контролируемых цепей, тем существеннее влияние собственного потребления энергии измерительными приборами на результаты измерений.
12.5. Механические узлы показывающих приборов
В показывающих измерительных приборах прямого отсчета подвижная часть под действием измеряемой величины перемещается по отношению к неподвижной. По конструкции отсчетного устройства различают показывающие приборы со стрелочным и световым указателями. Общей особенностью этих приборов является установка подвижной части на растяжках, на осях или на подвесе.
Установка на растяжках применяется в большинстве показывающих приборов. Растяжки — это упругие ленты из бериллиевой и оловянно-цинковой бронзы. Подвижная часть подвешивается на двух растяжках (рис. 12.4), а концы последних крепятся к двум плоским пружинам. Растяжки могут служить для подвода тока в подвижную часть прибора.
При установке подвижной части на оси последняя имеет обычно горизонтальное расположение (рис. 12.5) для уменьшения трения в опорах.
| Пружина
Рис. 12.4 Пружина |

Установка на подвесе — металлической или кварцевой нити — применяется в приборах особо высокой чувствительности, например в зеркальных гальванометрах (рис. 12.6). Луч света 1 от специ-
ального источника 2 выполняет роль светового указателя.
Закручивание растяжек и нити подвеса в показывающих приборах обеспечивает противодействующий момент. В приборах с установкой подвижной части на осях для создания этого момента служат спиральные пружины (1 на рис. 12.5), изготовляемые из фосфорной бронзы.
Вследствие температурных влияний, остаточных деформаций, а чаще механических толчков при перегрузках стрелка неработающего прибора может находиться не на нулевом делении. Корректор
Ш.иЖЗ
|
|
|
|

| 2 |
| ■Катушка |
| Пружина |
| Рис. 12.6 |
| — Нить |
| 7/ |
|
Рис. 12.5 |

| 1Зеркало |
| =1 |
if"////
|
|
необходим для возвращения стрелки на нуль шкалы. В случае применения пружины 1 (рис. 12.5) к корректору прикрепляется один ее конец. Второй конец пружины прикрепляется к оси 2 подвижной части. Стрелку 5 можно смещать посредством поводка 3, поворачивая винт 4, укрепленный на корпусе прибора. Для уравновешивания подвижной части прибора на ней укрепляют грузила — противовесы 6. Показания уравновешенного прибора почти не зависят от его положения.
Подвижная часть прибора вместе с пружиной образует обладающую массой и упругостью механическую систему, в которой, следовательно, возможны механические колебания. Поэтому при изменении измеряемой величины новое положение равновесия у подвижной части прибора получается не сразу, а в большинстве случаев после нескольких колебаний около нового положения равновесия. Для того чтобы подвижная часть возможно скорее устанавливалась в этом положении, у приборов есть успокоители. Последние нужны для поглощения кинетической энергии подвижной части. Для большинства стрелочных приборов время успокоения должно быть не более 4 с, причем временем успокоения считается время от момента включения прибора до момента, когда стрелка прибора отклоняется от положения равновесия не более чем на 1 % шкалы.
Применяются магнитоиндукционные и воздушные успокоители.
Рис. 12.7
Магнитоиндукциоиное успокоение основано на взаимодействии вихревых токов, индуктируемых в подвижной части при ее движении в магнитном поле постоянных магнитов, с этим полем. Алюминиевый сектор 1 (рис. 12.7, а), укрепленный на оси подвижной части, движется в поле нескольких постоянных магнитов 2, которые укреплены на опорной пластине 3. При движении сектора в нем возникают вихревые токи. Их взаимодействие с магнитным полем постоянных магнитов создает силу, которая (согласно принципу Ленца) тормозит подвижную часть.
В воздушных успокоителях для торможения используется разность давлений воздуха в закрытой камере по обе стороны легкого алюминиевого крыла, возникающая при его движении (рис. 12.7, б). Крыло укреплено на оси подвижной части прибора. Воздушные успокоители значительно слабее магнитоиндукционных; их приходится применять в тех случаях, когда наличие постоянного магнита внутри прибора может быть причиной дополнительных погрешностей в его показаниях.
В некоторых новых приборах установлены очень компактные жидкостные успокоители: в невысыхающей жидкости перемещается крыло, укрепленное на подвижной части прибора.
12.6. Системы показывающих приборов
Любой прибор непосредственного отсчета состоит из двух основных частей: измерительного механизма и измерительной цепи (измерительной схемы).
Назначение измерительного механизма — преобразование подводимой к нему электрической энергии в механическую энергию перемещения подвижной части и связанного с ней указателя. Из-
мерительная цепь преобразует измеряемую электрическую величину (напряжение, мощность, ток и т.д.) в пропорциональную ей величину, непосредственно воздействующую на измерительный механизм. Например, в вольтметре измерительная цепь состоит из катушки измерительного механизма и добавочного резистора. При постоянстве сопротивления измерительной цепи ток в измерительном механизме вольтметра пропорционален измеряемому напряжению.
Один и тот же измерительный механизм в соединении с различными измерительными цепями может служить для измерения различных величин.
В зависимости от принципа действия измерительного механизма различают несколько систем показывающих приборов, условные изображения которых даны в табл. 12.2.
Магнитоэлектрическая система. В измерительных механизмах магнитоэлектрической системы вращающий момент создается взаимодействием измеряемого постоянного тока в катушке механизма с полем постоянного магнита. Существуют два основных типа приборов магнитоэлектрической системы: приборы с подвижной катушкой (подвижной рамкой) и приборы с подвижным магнитом, причем первые применяются значительно чаще, чем вторые.
В магнитоэлектрическом механизме с подвижной катушкой (рис. 12.8) последняя установлена на опорах и может поворачиваться в воздушном зазоре магнитной цепи постоянного магнита 1.
Магнитную цепь измерительного механизма образуют магнитопровод 2, полюсные наконечники 3 и цилиндрический сердечник 4, которые изготовляются из магнитно-мягкого материала.
Угол между направлениями вектора магнитной индукции Б в воздушном зазоре и тока /в активной части проводников длиной Iпод-
|
|

| Таблица 12.2 Условное обозначение принципа действия (системы) прибора
| |||||||||||||||||||||||||||||||||
вижной катушки равен 90°. Следовательно, на каждый из проводников действует электромагнитная сила
F = BII,
а на подвижную часть механизма — вращающий момент
Мвр = 2Fwd/2 = wlBId = wSBI = квр1 (12.2)
гдеd — диаметр каркаса катушки с числом витковwи площадью поперечного сеченияS = Id; квр = wSd— коэффициент пропорциональности.
Так как противодействующий момент, создаваемый спиральными пружинами, прямо пропорционален углу закручивания, т. е. Мпр = = &пра, то угол поворота катушки при равенстве моментов Мвр = Мпр прямо пропорционален измеряемому току:
/ = кирос/ квр = Спра,
где Спр — постоянная прибора («цена деления»).
Постоянный магнит создает сильное магнитное поле в воздушном зазоре магнитной цепи прибора (0,2 — 0,3 Тл), и даже при малых значениях измеряемых токов можно получить достаточный вращающий момент. Поэтому магнитоэлектрические приборы весьма чувствительны, внешние магнитные поля мало влияют на их показания, и их собственное потребление энергии относительно мало. В частности, гальванометры в большинстве случаев изготовляются магнитоэлектрической системы. Высокая чувствительность прибора позволяет уменьшить плотность тока в токоведущих частях. Поэтому магнитоэлектрический прибор достаточно вынослив к перегрузкам. Этому способствует также линейная зависимость его вращающего момента от тока, а не квадратичная, характерная для большинства других систем приборов.
Для расширения пределов измерения приборы магнитоэлектрической системы, а также приборы других систем снабжают набором резисторов для делителей измеряемых величин. Резистор, включаемый последовательно с катушкой измерительного механизма, называется добавочным резистором; резистор, который включается параллельно с катушкой измерительного механизма или с ветвью, содержащей катушку и добавочный резистор, называется шунтом.
При изменении направления тока изменяется и направление вращающего момента. При переменном токе на подвижную часть прибора действуют быстро чередующиеся вращающие моменты противоположного направления. Их результирующее действие не изменит положения подвижной части прибора. Для измерения переменного тока магнитоэлектрический измерительный механизм ИМ должен быть соединен с тем или иным преобразователем. Преобразователем может быть, например, двухполупериодный выпрямитель (рис. 12.9).
Ток в магнитоэлектрическом измерительном механизме с такими преобразователями периодически пульсирует, и так как у подвижной части прибора значительная инерция, то ее отклонение пропорционально среднему за период значению вращающего момента:
Т т
Мвр=j;f wSBidt = wSB ~ Jidt = wSBIcp. о о
Следовательно, прибор измеряет среднее значение тока в цепи. Для измерений в цепях переменного тока на идеале прибора ука
зываются действующие значения. При синусоидальном токе действующее значение больше среднего в 1,11 раза [см. (2.16а) и
(2.18а)].
Для измерения токов высокой частоты применяются термопреобразователи (рис. 12.10). Термопреобразователь обычно состоит из одной или нескольких термопар 1 и нагревателя 2, через который проходит измеряемый переменный ток. Можно считать ЭДС термопары пропорциональной разности температур между ее горячим и холодным концами, т. е. мощности нагревателя, которая пропорциональна квадрату действующего значения /переменного тока [см. (2.50)]. Поэтому и вращающий момент, действующий на подвижную часть измерительного механизма, пропорционален /2, а следовательно, шкала прибора квадратичная.
Электромагнитная система. В измерительных механизмах электромагнитной системы вращающий момент обусловлен действием магнитного поля измеряемого тока в неподвижной катушке прибора на подвижный ферромагнитный якорь. Механические силы в подобном устройстве стремятся переместить якорь так, чтобы энергия магнитного поля устройства стала возможно большей.
В механизме с плоской катушкой (рис. 12.11) якорь 1 втягивается в катушку 2 с измеряемым током. Для усиления магнитного поля и регулирования вращающего момента служит неподвижный сердечник 3. Противодействующий момент создается спиральной пружиной. Для защиты от внешних магнитных полей измерительный механизм со всех сторон закрыт ферромагнитным экраном 4 (на рис. 12.11 верхняя крышка экрана снята).
В общем случае вращающий момент, действующий на подвижную часть, равен производной энергии магнитного поляWM= = L(a)i2/2по координате перемещения а [см. (7.16)]:
|
|
| ъ |
|
|

|
|

| и |
Л
. _ dWMг2dL(oi) вр~da ~2d{a) '
гдеL(а) иi— индуктивность и ток катушки.
Если ток катушки синусоидальный (г =Imsinwt),то равновесие подвижной части наступит при равенстве среднего за период вращающего момента и противодействующего момента пружины:
- ==-<12-4)
где I — действующее значение тока. Следовательно, действующее значение измеряемого тока
где (7(a) — цена деления.
Аналогичную зависимость имеет электромагнитный механизм при измерении постоянного тока г — I.
Неравномерность шкалы — недостаток приборов электромагнитной системы.
Магнитное поле прибора возбуждается самим измеряемым током и относительно слабое, так как большая часть пути магнитного потока проходит в воздухе. По этой причине у измерительного механизма электромагнитной системы малая чувствительность. Из-за слабости собственного магнитного поля прибор приходится защищать от внешних магнитных влияний. Для этого применяются ферромагнитные экраны (рис. 12.11) или же измерительные механизмы изготовляются астатическими.
Общий принцип астатического устройства измерительной системы заключается в следующем. Число катушек в механизме удваивается, причем обе катушки в равной мере участвуют в образовании вращающего момента, но их собственные магнитные поля имеют противоположные направления. Всякое внешнее однородное магнитное поле, усиливая магнитное поле одной катушки, на столько же ослабляет магнитное поле второй катушки. В результате внешнее магнитное поле не изменяет общий вращающий момент измерительного механизма.
Класс точности электромагнитных приборов обычно не выше 1,5, главным образом из-за влияния гистерезиса (остаточного намагничивания), что особенно сказывается при измерениях постоянного тока, и потерь энергии на перемагничивание при измерениях переменного тока (частотой не выше 1500 Гц).
| (12.3) |
Электромагнитный измерительный механизм обладает рядом ценных свойств. Неподвижную катушку с током легко выполнить с дос
таточным запасом сечения проводов на случай перегрузок. Приборы этой системы допускают большие перегрузки, дешевы и просты по устройству. Электромагнитными приборами измеряют преимущественно переменные напряжения и токи (невысоких частот). В промышленных установках переменного тока низкой частоты большинство амперметров и вольтметров — приборы электромагнитной системы.
Электродинамическая система. В электродинамических измерительных механизмах для создания вращающего момента используется взаимодействие двух катушек с токами.
Измерительный механизм этой системы состоит в основном из неподвижной 1 и подвижной 2 катушек (рис. 12.12). Противодействующий момент создают специальные пружины 3У которые вместе с тем служат для подвода тока в подвижную катушку. Последняя под действием электромагнитных сил стремится занять такое положение, при котором направление ее магнитного поля совпадает с направлением поля неподвижной катушки (максимальная энергия суммарного магнитного поля).
Вращающий момент электродинамического измерительного механизма определяется так же, как электромагнитного механизма [см. (12.3)]:
| _ dM(o) " Лd{a) ' |
| dWM da |
| М„ |
| (12.6) |
|
|
где в выражении энергии магнитного поля по (2.80) от угла поворота а подвижной катушки зависит только составляющая il^a)^;
и г2 — переменные (синусоидальные) токи подвижной и неподвижной катушек.
Так как в приборе две катушки, то можно существенно расширить область применения этого механизма. В зависимости от назначения прибора изменяется и характер его шкалы.
|
Рис. 12.12 |

В вольтметре обе катушки с большими числами витков обычно соединяются последовательно между собой (рис. 12.13, а) и последовательно с добавочным резистором, сопротивление которогоRlv
| u/R |
| V» |
Таким образом, в электродинамическом вольтметре
г1 — г2
где и — измеряемое напряжение;Rv= = RK+ Дд — общее сопротивление измерительной цепи вольтметра, равное сумме сопротивлений двух катушекRK и добавочного резистора Дд.
|
Рис. 12.13 |

Подставив выражения токов в (12.6) и выполнив преобразования, аналогичные (12.4) и (12.5), получим
U= л/37=CJa)Va,
где Сц(а) — цена деления;U— действующее значение напряжения.
| kik2kпр |
В электродинамических амперметрах на токи до 0,5 А подвижная и неподвижная катушки также соединяются последовательно. При большем значении измеряемого тока / подвижная и неподвижная катушки соединяются параллельно (рис. 12.13, б). В этом случае токи ц = kxi, i2= k2iСледовательно,
-Va = Cj (a)Va,
\dM(a)/ da
где C/(a) — цена деления; I— действующее значение тока.
Электродинамические вольтметры и амперметры имеют неравномерную шкалу.
В ваттметре (рис. 12.13, в) ток в неподвижной катушке равен току в контролируемой установке (в сопротивлении нагрузки Дн), т.е. г2 = г. К цепи подвижной катушки приложено напряжение этой установки, т.е. ц = и/RY,гдеRv— общее сопротивление цепи напряжения (параллельной цепи) ваттметра.
Подставив эти выражения в (12.6) и выполнив преобразования, подобные (12.4) и (12.5), получим
P = UI= а = Ср(а)а,
dM(a)/da F
где СР(а) — цена деления. Если цена деления изменяется мало от значения угла поворота подвижной катушки, то шкала электродинамического ваттметра близка к равномерной.
Электродинамические приборы пригодны для измерений в цепях как постоянного, так и переменного тока, причем в обоих случаях шкала у приборов одна и та же.
В электродинамическом приборе измеряемые токи возбуждают относительно слабое магнитное поле в воздухе. Поэтому для получения достаточного вращающего момента нужны катушки измерительного механизма с большими числами витков и собственное потребление энергии прибором относительно велико. Из-за слабого магнитного поля прибор чувствителен к внешним магнитным влияниям; для защиты от этих влияний приборы имеют экраны. Так как условия охлаждения плохие (теплоотдача через слой воздуха), то электродинамические механизмы не допускают сколько-нибудь значительной перегрузки (в особенности амперметры). Наконец, приборы этой системы дорогие. Однако благодаря отсутствию в магнитном поле ферромагнитных сердечников — элементов с нелинейными свойствами — точность электродинамического прибора может быть высокой — класса 0,2 и даже ОД.
Индукционная система. Индукционная измерительная система основана на использовании вращающегося магнитного поля. Если синусоидальные токи в двух катушках, определенным образом ориентированных в пространстве, не совпадают по фазе, то в части пространства результирующее магнитное поле этих двух катушек будет вращающимся вокруг некоторой оси. Если на этой оси находится тело из материала с малым удельным сопротивлением, то в нем возникнут вихревые токи.
Взаимодействие вихревых токов с вращающимся магнитным полем создает вращающий момент, под действием которого тело придет в движение.
В индукционном измерительном механизме вращающий момент создается воздействием результирующего магнитного поля двух электромагнитов переменного тока на подвижную часть — алюминиевый диск, в котором это поле индуктирует вихревые токи. Электромагниты возбуждаются измеряемыми переменными токами. Поэтому значение вращающего момента зависит от значений токов в обоих электромагнитах и угла сдвига фаз между ними. Это ценное свойство индукционного измерительного механизма положено в основу построения приборов для измерения мощности и энергии в цепях переменного тока.
Другие системы. В измерительных механизмах приборов электростатической системы вращающий момент создается электростатическими силами взаимодействия заряженных электродов.
Среди приборов этой системы наиболее распространен вольтметр. Под действием измеряемого напряжения заряжаются системы подвижных 1 и неподвижных 2 пластин прибора (рис. 12.14). Возникающие при этом электростатические силы притяжения создают вращающий момент. Противодействующий момент создается пружиной.
Изменение полярности напряжения не влияет на направления действия вращающего момента; следовательно, электростатический
вольтметр пригоден для измерения и 0 1 постоянного, и переменного напряжений. В ряде случаев весьма существенным преимуществом прибора следует считать то, что он практически не потребляет энергии. Однако при небольших напряжениях вращающий момент весьма мал, приходится увеличивать число пластин и вместо установки на кернах подвешивать подвижную часть на нити.
Электростатические вольтметры применяются преимущественно в лабораториях для измерений в цепях малой мощности и при непосредственных измерениях высоких напряжений.
В приборах тепловой системы отклонение подвижной части получается вследствие удлинения металлической нити, нагреваемой измеряемым током. К достоинствам этих приборов относится независимость показаний от частоты и формы кривой переменного тока. Тепловые приборы неустойчивы к перегрузкам, неточны вследствие чувствительности к температурным влияниям, и их потребление энергии относительно велико. По всем этим причинам тепловые приборы применяются редко — лишь для измерения токов высокой частоты.
Прочие системы приборов применяются для измерения немногих величин (например, вибрационный принцип для измерения частоты).
12.7. Логометры
Отклонение подвижной части у большинства электроизмерительных механизмов зависит от значений токов в их катушках. Но в тех случаях, когда механизм должен служить для измерения величины, не являющейся прямой функцией тока (сопротивления, индуктивности, емкости, сдвига фаз, частоты и т.д.), необходимо сделать результирующий вращающий момент зависящим от измеряемой величины и не зависящим от напряжения источника питания.

| 6Z> |
| Рис. 12.14 |
Для таких измерений применяют механизм, отклонение подвижной части которого определяется только отношением токов в двух его катушках и не зависит от их значений. Приборы, построенные по этому общему принципу, называются логометрами (по-гречес
ки «логос» — отношение). Возможно построение логометрическо- го механизма любой электроизмерительной системы с характерной особенностью — отсутствием механического противодействующего момента, создаваемого закручиванием пружин или растяжек.
В качестве примера рассмотрим работу магнитоэлектрического логометра с эллипсовидным сечением сердечника. Подвижная часть такого логометра состоит из двух катушек 1 и 2 (рис. 12.15, а), укрепленных на общей оси и жестко скрепленных между собой под некоторым углом. Токи в эти катушки подводятся через три мягкие серебряные спирали, не создающие при закручивании механического момента (одна из спиралей — общая для цепей токов обеих катушек). Если подвижная часть прибора достаточно хорошо уравновешена, то при отсутствии токов она находится в состоянии безразличного равновесия — стрелка указателя может быть на любом делении шкалы прибора.
| (12.7) |
Если в цепях обеих катушек есть постоянные токи 1г и /2, то на подвижную часть действуют в противоположных направлениях два вращающих момента, создаваемых взаимодействием поля постоянного магнита с индукциями Вг и В2 и токов в катушках [см.
(12.2)]:
Мвр1 = WiSB^; Мвр2 = w2SB2I2,
гдеw1иw2— числа витков катушек;S — их одинаковая площадь поперечного сечения.
| а |
Предположим, что Мвр1> Мвр2. Под действием большего вращающего момента подвижная часть поворачивается. При этом первая катушка, на которую действует больший вращающий момент, перемещается в область слабого магнитного поля (с меньшим значением индукции Вх из-за большего воздушного зазора). Одновременно
|
|

6
вторая катушка, на которую действует меньший вращающий момент, перемещается в область более сильного магнитного поля (воздушным зазор в магнитопроводе меньше). Таким образом, по мере поворота подвижной части больший вращающий момент убывает, а меньший возрастает. Следовательно, при некотором определенном положении подвижной части должно установиться равновесие моментов: Мвр1 = Мвр2.
На схеме (рис. 12.15, б) показано включение логометра для измерения сопротивлений. Здесь Е — ЭДС источника;R1— постоянное сопротивление цепи первой катушки;R2— постоянная часть сопротивления цепи второй катушки;R — сопротивление измеряемого объекта, находящегося вне прибора. При токах в катушках
= I2 = E/(Rl + IQ
и равенстве вращающих моментов из (12.7) имеем w1B1/R1= w2B2/(Rx+ Rx)9
откуда
Rx= R^/w^/B,) - R2.
ОтношениеB2/Bxзависит от конструкции магнитной цепи прибора и угла а — положения подвижной части. Следовательно, каждому значению измеряемого сопротивленияRxсоответствует определенное положение подвижной части логометра, которое не зависит от ЭДС Е.
В действительности на подвижную часть в состоянии равновесия действует некоторый механический момент из-за неполной уравновешенности подвижной части при закручивании токопроводящих спиралек. Вследствие наличия этого момента показания логометра зависят от ЭДС источника тем больше, чем меньше ЭДС.
Независимость положения подвижной части логометра от значения ЭДС используется в мегаомметрах, предназначенных для измерения больших сопротивлений (до 1014 Ом) при высоком напряжении (до 2500 В), например сопротивления изоляции. В качестве источника в мегаомметрах применяются небольшие магнитоэлектрические генераторы постоянного тока с ручным приводом.
В частотомерах катушки логометра заключаются в цепь синусоидального тока через выпрямители и элементы, сопротивления которых зависят от частоты.
В ряде случаев нежелательно безразличное положение подвижной части логометра, так как это может привести к ложному отсчету показания прибора при выключенном источнике питания. Чтобы предупредить подобный ложный отсчет, конструкцией логометра предусматривается отклонение стрелки за пределы шкалы, например действием небольшого механического момента, создаваемого неполной уравновешенностью подвижной части.
12.8. Счетчики электрической энергии
Для измерения электрической энергии (активной и реактивной) в цепях переменного тока используются счетчики индукционной системы, которым в последнее время все большую конкуренцию составляют электронные счетчики.
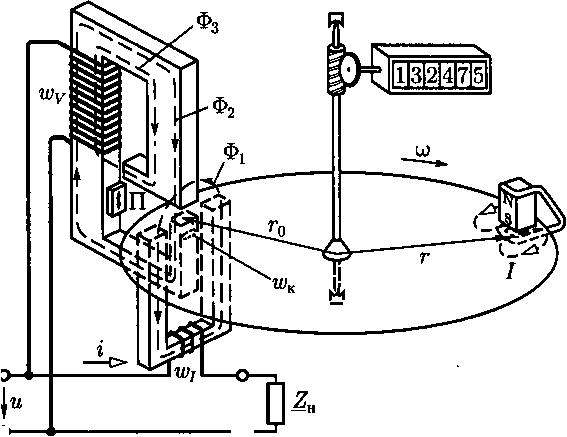
Индукционный счетчик. Схема устройства однофазного индукционного счетчика, включенного в цепь для измерения активной энергии приемника с сопротивлением нагрузкиZwпоказана на рис.
12.16.
Подвижная часть счетчика представляет собой свободно вращающийся алюминиевый диск, на который одновременно воздействуют в противоположных направлениях вращающий момент, пропорциональный активной мощности приемника
|
|
| (12.8а) |
| вр |
Мвр —fcBpР,
|
|
и тормозной момент. При равенстве вращающего и тормозного моментов диск вращается с постоянной скоростью.
|
|
| < |
| О |
| L |
Для создания тормозного момента в индукционном счетчике используется магнитоиндукционный принцип. Поле постоянного магнита (рис. 12.16) индуктирует во вращающемся диске ЭДС, пропорциональную потоку постоянного магнита Ф и средней окружной скорости у вращения части диска, находящейся между полюсами:
Е = А^Фу = А^Ф^-гсга/бО = к2Фп,
где п — частота вращения диска (мин-1); г — средний радиус части диска, находящейся между полюсами. Угловая скорость вращения диска ио = у/г.
Под действием этой ЭДС в диске возникает ток, значение которого пропорционально удельной проводимости у материала диска:
/= мн
Взаимодействие поля постоянного магнита с током в диске создает тормозной момент, пропорциональный току и потоку:
Мгор = кА1Ф,
или после подстановки выражений для тока и ЭДС
Мтор = кьпФ2п = кторп. (12.86)
Этот момент при установившейся частоте вращения подвижной части равен вращающему моменту. Следовательно, из (12.8а) и (12.86) мощность
Р = кторп/ квр.
Интеграл от мощности по времени равен электрической энергии, полученной контролируемой цепью за промежуток времени ^ — к'-
W= [Pdt= ^fndt =N= CC4N, i i k»p
где N— суммарное число оборотов подвижной части за время ^ - h, Ссч — постоянная счетчика.
Число оборотов подвижной части N регистрирует счетный механизм, соединенный с осью счетчика червячной передачей. Передаточное число между осью и счетным механизмом выбирается так, чтобы счетный механизм показывал непосредственно киловатт-часы, а не числа оборотов подвижной части.
Чтобы получить в общей форме выражение вращающего момента приборов индукционной системы, предположим, что подвижную часть — диск — пронизывают два переменных магнитных потока:
= Ф1т8ш(иг + <ф) и Ф2 = ф2тб1пиг
(рис. 12.17). Они индуктируют в соответствующих контурах диска ЭДС, каждая из которых отстает по фазе от индуктирующего ее потока на четверть периода:
ег = —d$i/dt =-u;<I>lmcos(u)t + -ф);
е2 = —dФ2/dt = — (jdF2mcos(jd£.
Эти ЭДС вызывают в диске вихревые токи гх и г2. Исследуя общий характер процесса, можно пренебречь при промышленной частоте 50 Гц индуктивным сопротивлением конту
ров вихревых токов в диске и считать их совпадающими по фазе с ЭДС:
h = ei/Ддх = -(ш/Дд1)Ф1тсо8(ш«+'ф);
h = е2/Дд2 = -(ш/Д^ФгтСОзш*,
|
г^ Fi F2 jy Рис. 12.17 |

где Дд1, ДЛ2 — активные сопротивления контуров. Силы, воздействующие на подвижную часть, пропорциональны соответствующим потокам и токам, т. е.
Fx= кгФ^2; F2= 1ф2гь
где кх и к2 — постоянные коэффициенты, которые учитывают геометрические параметры механизма.
| вр |
| rp ^lm, 2 т |
Эти силы при одинаковом направлении магнитных потоков и одинаковом направлении токов в контурах (рис. 12.17) направлены встречно, поэтому среднее значение вращающего момента можно определить через интеграл за период Тот произведения разности сил (F2- Fx)на плечо г0 их приложения (см. рис. 12.16):
Г
М,
к к —/ sin((jd£ + ty)coswtdt + —I (smut)cos(wt +
Д2 n д1 n
Учитывая, что
т
J' (sin uot) cos uotdt = J* dt =0;
о
T
| / |
1С 1
cos2uotdt= —;J sin2(jotdt = —,
после простых преобразований находим
|
|
| (jor0 kx |
| ко |
| MRn= |
| ЙД1 ^д2 |
Ф1тФ2шsini|>,
|
|
где сопротивления Дд1 и Дд1 обратно пропорциональны удельной проводимости ч материала диска (алюминия).
Обозначив постоянный множитель в выражении вращающего момента fcBp, получим
Мвр = fcBpuj ^ Ф1 тФ2тsin г|). (12.9)
Вращающий момент пропорционален угловой частоте ио, следовательно, индукционный прибор пригоден для измерения в цепи переменного тока одной определенной частоты. Вращающий момент пропорционален также удельной проводимости 4 материала диска. Последний изготовляется из алюминия — материала со значительным температурным коэффициентом сопротивления — около 0,004 °С-1 (см. табл. 1.1), т.е. изменение температуры диска на 10 °С вызывает изменение вращающего момента на 4 %. Однако в счетчиках вращающий и тормозной моменты в одинаковой степени зависят от электрического сопротивления диска и температурные влияния на показаниях счетчика сказываются мало.
Вращающий момент индукционного прибора [см. (12.9)] должен быть в счетчике пропорционален активной мощности Р = UI cos ср. Для этого необходимо, чтобы один из двух магнитных потоков, например Ф2т, был пропорционален напряжениюU,а второй Ф1т — току I.
Электромагнит цепи напряжения счетчика устроен так, что большая часть пути магнитного потока Ф2 проходит по ферромагнитному участку магнитопровода (рис. 12.16). Поэтому можно считать [см. (8.46)], чтоU = 4,44/иуФ2т = Ф2тсопз1.
Электромагнит цепи тока счетчика имеет U-образную форму — его магнитный поток примерно половину пути проходит в воздухе. Так как магнитное сопротивление ферромагнитного участка магнитопровода незначительно по сравнению с магнитным сопротивлением воздушного промежутка, то им можно пренебречь и выразить мгновенное значение потока этого электромагнита следующим образом [см. (7.7)]:
Фх = iwr/Rw (12.10)
гдеRM— магнитное сопротивление воздушного промежутка. Величины в правой части (12.10), кроме тока г, постоянные и поток Ф1т пропорционален току I.
Вращающий момент счетчика должен быть пропорционален и cosср. Так как в выражении вращающего момента (12.9) содержится лишь одна функция сдвига фаз sini[;, то необходимо получить sinij; = costp, или г); = тс/2 — tp.
Можно приближенно считать, что поток Фх совпадает по фазе с токомi(рис 12.18). Следовательно, угол сдвига фаз между напряжением и и потоком Ф2 должен быть равен тс/2, для того чтобы получить
= -к/2 - ф. Рассмотренная ранее векторная диаграмма (см. рис. 8.8) катушки с магнитопроводом (см. рис. 8.7, а) показывает, что сдвиг фаз между напряжением, приложенным к катушке, и потоком в магнитопроводе будет равен -к/2, если подобрать соответствующее зна
чение индуктивности рассеяния при неизменных прочих параметрах. В индукционном счетчике предусмотрена такая возможность. Потокосцепление рассеяния с обмоткой напряженияwvсодержит составляющую и)уФ:], где Ф3 — поток, замыкающийся помимо диска. Значение этой составляющей потокосцепления рассеяния можно изменять, регулируя ширину воздушного зазора на пути потока Ф3, например, с помощью подвижной ферромагнитной пластины П (см. рис. 12.16).
Момент сил трения в индукционном счетчике значителен и необходима его компенсация. Во всех конструкциях индукционных счетчиков для создания вспомогательного момента индукционным путем используется один и тот же общий принцип — нарушение симметрии в магнитной цепи потока Ф2 (пропорционального напряжениюU).На сердечнике электромагнита укрепляется короткозамкнутый виток медной проволокиwK, охватывающий часть поверхности поперечного сечения сердечника вблизи диска. Магнитное поле тока витка, накладываясь на основное поле, создает под витком небольшой магнитный поток, сцепленный с диском; совместно с основным потоком этот поток создает вспомогательный момент, компенсирующий момент трения.
Для учета энергии в трехфазных системах служат счетчики трехфазного тока, в которых два или три движущихся элемента индукционных счетчиков воздействуют на общую ось счетчика и через нее — на счетный механизм. Схемы этих счетчиков соответствуют
схемам измерения мощности методами двух (см. рис. 3.13, а) или трех (см. рис. 3.14) ваттметров или некоторым специальным способам измерений.
|
Рис. 12.18 |

| Регистрирующее устройство | ||||
|
|
| |||
| Процессор | ||||
|
| ||||
| АЦП | ||||
| г | IxAj^y-l ТТ ^VVN | |||
| t | ТН | |||
Электронный счетчик. Упрощенная структурная схема однофазного электронного счетчика, включенного через трансформаторы тока ТТ и напряжения ТН (см. 9.17) в цепь для измерения активной энергии приемника с сопротивлением нагрузкиZwпоказана на рис. 12.19. Принцип действия счетчика заключается в непрерывном преобразовании текущих значений тока и напряжения с помощью АЦП (см. 10.27) через малые интервалы времени, за- Рис. 12.19 даваемые процессором, в числовые экви
валенты, последующем вычислении процессором активной мощности по (2.55) и энергии по (12.18в) и регистрации результатов вычислений с помощью электровакуумных (см. 11.2) или других индикаторов.
Электронный счетчик не содержит подвижных частей, а программирование процессора позволяет эффективно использовать его в автоматизированных системах комплексного учета электроэнергии для анализа суточных графиков нагрузки, многотарифного расчета за электроэнергию и т. п.
Электронный счетчик применим и для измерений энергии в цепях постоянного тока при наличии датчиков постоянного тока и напряжения и соответствующем программировании процессора.
12.9. Мостовой метод измерения
Мостовые методы применяются для измерения параметров резисторов, катушек индуктивности и конденсаторов. Для измерения параметров катушек индуктивности и конденсаторов необходимы мосты переменного тока. Для измерения сопротивлений резисторов чаще применяются мосты постоянного тока.
На рис 12.20 изображен четырехплечий мост постоянного тока. В одну диагональ моста включен источник постоянной ЭДС Е, а в другую диагональ с помощью ключейSxиS2может включаться гальванометрG.
В одно плечо моста к точкамbudприсоединяется резистор с неизвестным сопротивлениемRx.В трех остальных плечах моста находятся резисторы, сопротивления которых известны и могут регулироваться.
При равновесии моста потенциалы точек бис одинаковы (Фь = Фс). т.е.
R\h —Rxh — R$h-
|
|
|
|

| d |
| RX^RXR,/R2.(12.11) |
| Схемы четырехплечих мостов переменного тока весьма разнообразны. Рассмотрим простейшие из них. |
| а |
Разделив почленно первое равенство на второе, найдем значение измеряемого сопротивления:
На рис. 12.21, а и б приведены одна из разновидностей схемы че- тырехплечего моста переменного тока и его потенциальная диаграмма на комплексной плоскости
|
Рис. 12.21 |

| б |
| а |
(см. 2.24) при разомкнутой цепи гальванометра. Так как треугольники напряжений правой и левой ветвей моста прямоугольные, то концы векторов, изображающих потенциалы точек бис, находятся на полуокружности с диаметром, равным ЭДС Ё= Е (начальная фаза ЭДС выбрана нулевой). Изменяя параметры регулируемых элементов моста, можно совместить потенциалы точек бис. Равновесие моста (ф6 = фс) фиксируется с помощью гальванометра. Назначение ключейSxиS2то же, что и у моста постоянного тока.
| (12.12) |
| (12.13) |
При равновесии моста из равенства треугольников напряжений следует
Rih = -jXck, jXLI = R2I2.
Разделив почленно одно уравнение на другое и учитывая, что XL=ujLи Хс = 1 /и С, получим
L/ R\ = R2C.
Выражение (12.13) показывает, что использование моста переменного тока позволяет измерять параметры индуктивного или емкостного элемента, если параметры других элементов моста известны и можно пренебречь потерями в катушке и конденсаторе.
При исследовании реальных катушек необходимо знать параметры ее эквивалентной схемы замещения (см. рис. 7.7, а)> состоящей из последовательного соединения резистивного и индуктивного элементов. ПараметрыLxиRxэквивалентной схемы замещения катушки могут быть измерены с помощью моста, схема которого показана на рис. 12.22, а. На рис. 12.22, б приведена потенциальная диаграмма такого моста. При равновесии моста потенциалы точек Ь и с совпадают (ф6 = фс), откуда следует, что
|
|

| d |
| Фа = 0 |
| +J |
Lx— LQRl/R2) Rx— R0Ri/R2.
Для повышения производительности и точности измерений применяются мосты с встроенной микропроцессорной системой (рис. 12.23), в которых реализованы автоматическое измерение и регистрация параметров R, L, С. Нажатием соответствующих клавиш на панели управления задаются вид измеряемого параметра, значение частоты напряжения генератора и форма представления результата. Микропроцессор по команде с панели управления включает генератор и считывает программу из постоянного запоминающего устройства (ПЗУ), определяющую последовательность операций. Переменное напряжение разбаланса моста преобразуется в постоянное напряжение, а затем с помощью АЦП — в числовой эквивалент. По значению числового эквивалента микропроцессор регулирует цепь моста до состояния равновесия. Один из вариантов регулировки моста заключается в применении управляемых резисторов, как и в
ЦАП (см. рис. 10.122).
+ 1
б
| Микропроцессор | ОЗУ | ПЗУ | Панель управления | Дисплей | |||||||||
| ту | ту | Ту | zy |
| Л | ||||||||
|
|
| ||||||||||||
| Шины микропроцессорной системы | |||||||||||||
| ту | Л |
| ✓у |
| zy | ||||||||
|
|
| ||||||||||||
| Генератор | Мост |
| Преобразователь -/— |
| АЦП | ||||||||
| Рис. 12.23 |
При достижении равновесия моста микропроцессорная система выполняет необходимые вычисления для получения результата измерения, преобразует его и выводит на дисплей в требуемой форме.
12.10. Компенсационный метод измерения
Основное назначение компенсационного метода — это измерение малых ЭДС, например термопары, и градуировка электроизмерительных приборов.
Простейшая принципиальная схема для измерения малых ЭДС показана на рис. 12.24, а. Вспомогательный источник регулируемого постоянного тока I (реостатом с сопротивлениемRp)подключен к потенциометру с сопротивлениемRu.Разность потенциалов точек а и Ь последнего уравновешивает измеряемую ЭДС (Ех =Uab),а разность потенциалов точек с иd— ЭДС образцовой меры, т. е. здесь нормального элемента (Еиз =UrJ).
Для компенсации измеряемой Ех и нормальной Еп:л ЭДС нужно перемещать подвижные контакты Ь и с до тех нор, пока гальванометрыG2иGxне покажут отсутствие токов. Значение ЭДС Еи:) известно точно, поэтому после компенсации ЭДС Еи :) по отмеченному значению сопротивления Rxрассчитывается точное значение тока в потенциометре I = E^/R^ Значение измеряемой ЭДС определяется из условия Ех =Uab= R2I = (R2/Ri)EU 31в котором значенияRxи R2отсчитываются на шкале потенциометра.
Важное преимущество компенсационного метода — возможность измерять (или использовать для управления) ЭДС объектов малой мощности.
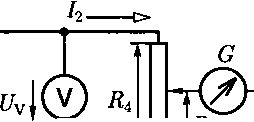
На рис. 12.24, б приведена схема компенсационного метода градуировки амперметра и вольтметра. Установив положения движков потенциометров так, чтобы токи нормальных элементов равнялись нулю, и зная сопротивления потенциометров, получим соответствие между отклонениями стрелок амперметра и вольтметра и значениями измеренных токов:
-1 +
|
Рис. 12.24 |

|
Т Лз |
| + |
| б |
^нэ
|
|
Ik — Л = Дкэ/^Ь ^v —R4I2 — Д1.А/Д
Изменяя сопротивления регулируемых резисторов Д5 И i2(j,можно проградуировать шкалы амперметра и вольтметра.
12.11. Электронные измерительные приборы.
Электронный вольтметр
| <3- |
Одним из основных недостатков показывающих вольтметров с электромеханическими измерительными механизмами является относительно малое сопротивление цепи вольтметра (5 — 10 кОм), которое принято называть его входным сопротивлением. Объясняется это тем, что для получения достаточно большого вращающего момента, действующего на подвижную часть измерительного механизма в таких приборах, необходимо, чтобы токи в катушках (см. рис. 12.11, 12.12 и др.) были достаточно большими. Такими вольтметрами нельзя пользоваться при измерении напряжения на резисторе, сопротивление которого соизмеримо с входным сопротивлением вольтметра (см. рис. 12.2).
|
|

У электронных вольтметров большие входные сопротивления (до 10 МОм), что существенно расширяет возможную область их применения. Кроме того, электронные вольтметры могут иметь очень высокую чувствительность.
Существует много разновидностей электронных вольтметров. Рассмотрим одну из возможных схем (рис. 12.25), выполненную как мост постоянного тока. В два плеча моста включены одинаковые полевые транзисторы —VTXиVT2с управляющим р-п-переходом и n-каналом (см. рис. 10.19,10.20 и 10.25). ПотенциометрRPXслужит для компенсации различия параметров транзисторов. Равновесие моста определяется по нулевому положению стрелки включенного в диагональ моста показывающего прибора с электромеханическим измерительным механизмом (например, магнитоэлектрическим гальванометром) при короткозамкнутых входных выводах, т.е. Ux= 0. В этом случае, пренебрегая токами в цепях затворов, на основании уравнений по второму закону Кирхгофа, составленных для контуров, которые отмечены на рис. 12.25 штриховой линией, напряжения между затворами и истоками обоих транзисторов будут одинаковыми:
^ЗИ1 — ^ЗИ2 = ^зи = ^ 1 ~~
где Ic —Ici = Ic2 — одинаковые токи транзисторов.
С помощью потенциометраRP2можно изменять режим работы транзисторов. Если на вход вольтметра подано измеряемое напряжение Ux^ 0, то равновесие моста нарушится и появится ток в диагонали моста.
Отклонение стрелки прибора пропорционально значению измеряемого напряжения. Регулируемый резисторRpслужит для калибровки вольтметра и изменения пределов измерения.
Так как индикатором в электронном вольтметре служит показывающий прибор с электромеханическим измерительным механизмом, то точность электронного вольтметра не может быть выше точности последнего. В действительности точность электронного вольтметра из-за неидентичности транзисторов ниже точности индикатора. Большое входное сопротивление электронного вольтметра получается вследствие малого тока затвора транзистораVTX.Высокая чувствительность электронного вольтметра объясняется тем, что небольшое изменение измеряемого напряжения приводит к сильной разбалансировке моста и достаточно большому току в диагонали моста, где находится показывающий прибор.
Постоянный ток с помощью электронного вольтметра измеряется косвенно путем измерения падения напряжения, вызываемого этим током на резисторе с малым сопротивлением.
12.12. Цифровые измерительные приборы. Цифровой вольтметр
Цифровые измерительные приборы широко применяются для измерения частоты, интервалов времени, напряжения, разности фаз и т.д. К их общим достоинствам относятся высокие чувствительность и точность, объективность отсчета показаний, возможность сопряжения с другими цифровыми устройствами для обработки результатов измерения, а к недостаткам — сложность изготовления и ремонта, высокая стоимость, а также утомление оператора при длительном наблюдении за цифровым индикатором.
Ограничимся здесь рассмотрением структурной схемы цифрового вольтметра постоянного напряжения (рис. 12.26). На рис. 12.27 приведена совмещенная временная диаграмма работы различных блоков структурной схемы.
Совместную работу блоков цифрового вольтметра синхронизирует блок управления, например мультивибратор (см. рис. 10.104), на выходных выводах которого формируются отрицательные импульсы напряжения щ с периодом повторения Т. Импульсы напряжения щ одновременно включают генератор линейно изменяюще
го
|
|
| ■Ir |
| Селектор |
| Счетчик |
| Компаратор |
| иш |
Блок управления
|
|
| «ЛГ |
| итип\ г |
| ГЛИН |
| иг |
..............
Генератор
| -if------------------------------ J %лин/ | 1"-1 Y 1 i | ||||
| ивх | ; L^^i | : L^i | t | ||
| > 1 | |||||
| ! № | 1 | № | t | ||
| i 1 i 1 ................................ IIIIIIIIINIIIIIIIIII........ llllll............... Illlllljllllll....... t | |||||
| 1 1 i 1i 1 Iiiiiiiiiiiiiiiii! liniiiiiiiiiiiiii i | |||||
| Рис. 12.27 |
гося напряжения (ГЛИН) (см. рис. 10.108) и селектор. На выходе ГЛИН формируется напряжение, нарастающее по линейному закону»итин —St,которое подается на вход блока сравнения, т. е. компаратора (см. рис. 10.96). Селектор связывает выход высокочастотного импульсного генератора (частота/) со входом счетчика (см. рис. 10.117). В блоке сравнения линейно нарастающее напряжение ГЛИН сравнивается с измеряемым постоянным напряжениемUliX.
Через интервал времениAtот начала запуска ГЛИН в работу напряжение на его выходе становится равным измеряемому напряжению, т.е.UBX=SA£, гдеSназывается крутизной преобразования. В этот момент времени на выходе блока сравнения формируется положительный импульс напряжения и2, который поступает на вход селектора и прекращает связь между выходом высокочастотного генератора и входом счетчика. Таким образом, в цифровом вольтметре измеряемое напряжение сначала преобразуется в пропорциональный интервал времениAt = Um/S,а затем этот интервал времени преобразуется в пропорциональное интервалу число импульсов
n=Atf=fujs;
которое фиксируется цифровым индикатором.
Так как частота / велика, а крутизна преобразованияSмала, то даже малым значениям входного напряженияUliXсоответствует большое число импульсов п, что обеспечивает высокие чувствительность и точность прибора. Цифровая индикация результатов измерения обеспечивает объективность отсчета показаний.
12.13. Регистрирующие приборы и устройства
| ф Ф Ф ® Ф |
Для регистрации быстро протекающих процессов, а также для измерения частоты, динамических характеристик [например, петли гистерезиса (см. рис. 8.10)], характеристик полупроводниковых при-
Вертикально
Отклоняющие
Пластины
|
отклоняющие пластины Рис. 12.28 |

боров и электронных ламп служит электронно-лучевой осциллограф.
Электронно-лучевая трубка (рис. 12.28) — важнейшая часть электронного осциллографа — состоит из электронного прожектора, отклоняющей системы и экрана. Электронный прожектор создает узкий электронный луч. Посредством отклоняющего устройства измеряемая величина управляет движением луча, который играет роль практически безынерционной подвижной части осциллографа. Экран покрыт слоем люминофора, и на нем под действием электронного луча образуется светящееся пятно. При отклонениях луча это пятно движется по экрану и дает изображение кривой исследуемого процесса. Электронный прожектор («электронная пушка») состоит из подогревного катода, управляющего электрода С — модулятора — и двух анодов — Аг и А2.
Электрическое поле, необходимое для ускорения электронов, обеспечивается высокими положительными потенциалами двух анодов — Ах и А2 — полых цилиндров с одной или более диафрагмами, помещенных на пути электронного луча. Последние служат для задержания электронов, сильно уклонившихся от оси луча. Напряжение между первым анодом Ах и катодом составляет от одной десятой до одной трети напряжения между вторым анодом А2 и катодом, равного 600-5000 В.
Для отклонения электронного луча в горизонтальном и вертикальном направлениях в трубке есть две пары отклоняющих пластин. Исследуемое периодическое напряжение подается на вертикально отклоняющие пластины, вследствие чего происходит отклонение луча в вертикальном направлении (по оси ординат). Горизонтально отклоняющие пластины необходимы для развертки исследуемого напряжения во времени (по оси абсцисс). Для этого в большинстве случаев на эти пластины подается периодическое пилообразное напряжение.
Структурная схема осциллографа (рис. 12.29) состоит из ряда блоков и ключей, с помощью которых можно получить различные режимы работы осциллографа.
|
|

Электронный осциллограф может работать в следующих основных режимах: в режиме внутренней синхронизации, в режиме внешней синхронизации, в автоматическом режиме и режиме специальной развертки.
Входной блок электронного осциллографа — аттенюатор — представляет собой калиброванный делитель напряжения, с помощью которого можно уменьшить напряжение входного сигнала иВХ1 а также напряжение синхронизирующих импульсов ис и в нужное число раз.
В режиме внутренней синхронизации замкнуты ключиSb S4и напряжение входного сигнала через аттенюатор поступает на вход усилителя и вход ГЛИН. Напряжение с выхода ГЛИН поступает на горизонтально отклоняющие пластины х — х осциллографа, и изображение электронного луча на экране начинает двигаться в горизонтальном направлении. Для того чтобы входной сигнал, поступающий после усиления на вертикально отклоняющие пластины у —у, был расположен в центре экрана, его необходимо, прежде чем подавать на эти пластины, задержать на некоторое времяAtс помощью линии задержки (рис. 12.30, а).
Недостатком режиме внутренней синхронизации является возможное искажение исследуемого входного сигнала линией задержки.
В режиме внешней синхронизации замкнуты ключиS2—S4и запуск ГЛИН (см. рис. 10.105) осуществляется специальным импульсом синхронизации ис и, который предшествует входному сигналу ивх на времяA t(рис. 12.30,б). В этом случае линия задержки не нужна и можно получить более точное воспроизведение входного сигнала.
В автоматическом режиме замкнуты ключиS2,SAи на выходе ГЛИН получается пилообразное напряжение с частотой /г. Если частота /г совпадает с частотой /периодического напряжения на входе осциллографа или кратна ей, то на экране осциллографа наблюдается неподвижное изображение (рис. 12.30, в).
| у/. ., V------------------------- ► и /W 1 | ^"с.и /W ' | ||
| « At* | 't \ 1 | « At„ | t иТЛИИ___ I |
б
| л |
| %лин |
л
%лин
Рис. 12.30
|
|
В режиме специальной развертки замкнуты ключи S2, $5 и на горизонтально отклоняющие пластины осциллографа подается какое- либо специальное периодическое напряжение их. Поэтому с помощью осциллографа можно проводить некоторые специальные измерения. Например, если на пластины х — х подано синусоидальное напряжение их — ?7msin2'iv/a.^, то можно измерить частоту / входного напряжения, если оно также синусоидальное и частота кратна частоте В зависимости от кратности отношения частотf/fxна экране осциллографа наблюдаются различные фигуры (рис. 12.31).
Чувствительностью осциллографа называется отношение вертикального отклонения светового пятна на экране в миллиметрах к значению входного напряжения в вольтах. Чувствительность самой трубки без усилителя относительно низкая, примерно 0,5 — 1 мм/В. Однако применение усиления повышает чувствительность осциллографа до 1 — 2 мм/мВ.
Фотографирование кривых с экрана осциллографа возможно с помощью специальных приставок.

| /=А/2 Рис. 12.31 |
Для регистрации медленно изменяющихся во времени величин (с частотой до 10 Гц) применяются самопишущие приборы. Запись текущего значения регистрируемой величины производится на движущейся бумаге в координатах «измеряемая величина — время». Значение измеряемой величины определяется положением подвижной части измерительного механизма, например магнитоэлектрического.
Для регистрации информации в цифровой и буквенной формах применяются алфавитно-цифровые печатающие устройства (АЦП), магнитофоны и дисплеи. Последние применяются также для регистрации графической информации.
12.14. Измерительные системы
Типовая измерительная система содержит стандартные устройства: датчики измеряемых величин, цифровые измерительные приборы, регистрирующие приборы, контроллер и системный интерфейс (рис. 12.32).
Датчики и первичные преобразователи подключаются непосредственно к исследуемому объекту и служат для получения исходной информации (например, частоты вращения пу мощности Рвала электродвигателя и т.п.) в виде доступных для измерения электрических величин в аналоговой форме.
Цифровые приборы измеряют аналоговые электрические величины, преобразованные в числовые эквиваленты.
Контроллер представляет собой программно-управляемое устройство на основе микропроцессоров.
Регистрирующие устройства (алфавитно-цифровое печатающее устройство, графопостроитель, магнитофон и т. п.) позволяют документировать информацию о результатах измерения.
Интерфейс содержит совокупность электрических, механических и программных средств, позволяющих соединять между собой различные части измерительной системы.
|
|

Работой системы управляет контроллер. По команде контроллера интерфейс устанавливает все приборы системы в исходное состояние. Следующая команда переводит все приборы в режим дистанционного управления. Управление системой заключается в передаче адресов и команд из контроллера, по которым происходит выборка передающих и принимающих информацию приборов и соответствующих линий связи.
Различают контроллеры без обработки и с обработкой данных. В последнем случае контроллеры помимо функций управления выполняют также логические и математические операции, необходимые для анализа данных измерения, их обработки по программе и принятия решений, определяющих работу отдельных приборов и системы в целом.
Применение измерительных систем обеспечивает: многофункциональность; автоматизацию процессов измерения, калибровки и статистической обработки; дистанционность управления; проведение косвенных и совокупных измерений; запоминание выборок; автоматизацию поверочных процедур.
12.15. Преобразователи неэлектрических величин
Преобразователи неэлектрических величин (температуры, давления, координаты пространственного расположения и т. п.) дают возможность применять для их определения приборы и методы измерения электрических величин.
Различают параметрические и генераторные преобразователи. В первых измеряемая неэлектрическая величина вызывает изменение одного из электрических параметров элемента электрической цепи, которым является преобразователь, во вторых она преобразуется в ЭДС. К параметрическим преобразователям относятся:
реостатный, основанный на изменении сопротивления участка проводника Л, длину которого определяет положение подвижного контакта, зависящее от координаты х контролируемого объекта;
термочувствительный, основанный на зависимости сопротивленияRполупроводниковых резисторов (терморезисторов) от температуры Ф;
тензометрический, основанный на зависимости сопротивления участка проводников (из некоторых металлов) и полупроводников от механических напряжений, возникающих, например, при их изгибах или скручивании;
электромагнитный, объединяющий обширную группу преобразователей, в которых параметры электромагнитного поля зависят от параметров контролируемого объекта.
В емкостном преобразователе используется зависимость емкости С конденсатора от взаимного расположения его электродов, свя-
2 j занного с координатой х контролируемо-
| р |
—го объекта. Аналогично в индуктивном преобразователе используется зависнув мость индуктивности катушки от положе- 0 ) ния сердечника L(x) или взаимной индуктивности двух катушек от их взаимного расположения М(х).
Рис. 12.33 ® вихретоковом преобразователе (рис.
12.33) используется зависимость интенсивности вихревых токов гв, возбуждаемых в контролируемом изделии 1 синусоидальным током г высокой частоты в катушке 2, от электропроводности. Чем больше интенсивность вихревых токов, т.е. меньше повреждений в изделии и больше его проводимость, тем меньше сопротивление цепи возбуждения. Для повышения чувствительности преобразователя между катушкой возбуждения и контролируемым изделием помещают измерительную катушку. К генераторным преобразователям относятся: пьезоэлектрический, представляющий собой кристалл (кварц, сег- нетовая соль и др.), в котором ЭДС возникает под действием внешних механических сил, например давления на поверхность кристалла;
термоэлектрический, основанный на зависимости ЭДС термопары от разности температур ДФ ее частей (см. рис. 12.10), и т.д.
Электрические параметры параметрических преобразователей измеряются мостовыми методами и логометрами, ЭДС генераторных преобразователей — вольтметрами и компенсационным методом.
ГЛАВА 13 МАШИНЫ ПОСТОЯННОГО ТОКА
13.1. Общие сведения
Электрические машины постоянного тока (двигатели и генераторы) находят широкое применение в различных областях техники. Основное достоинство двигателей постоянного тока заключается в возможности плавного регулирования частоты вращения и получения больших пусковых моментов, что очень важно для тяговых двигателей на электрическом транспорте, а также для привода различного технологического оборудования.
Электрические машины постоянного тока малой мощности применяются в системах автоматического регулирования как для привода исполнительных механизмов, так и в качестве датчиков частоты вращения подвижных частей регулируемой системы.
Генераторы постоянного тока входят в состав систем электропитания специального оборудования, например в радиотехнических установках, при зарядке аккумуляторов, для питания электролитических ванн и т. д.
Общим недостатком электрических машин постоянного тока является сложность их конструкции, связанная главным образом со ще- точно-коллекторным аппаратом. Кроме того, в коллекторно-щеточ- ном аппарате, осуществляющем постоянную перекоммутацию цепей электрической машины, возникает искрение. Это снижает надежность машин и ограничивает область их применения. Существенным недостатком двигателей постоянного тока является необходимость предварительного преобразования для них электрической энергии цепи переменного тока в электрическую энергию цепи постоянного тока.
13.2. Устройство машины постоянного тока
Машину постоянного тока в основном можно разделить на неподвижную и вращающуюся части. Неподвижная часть состоит из станины, на которой укреплены главные полюсы для возбуждения главного магнитного потока и дополнительные — для улучшения коммутации в машине (см. 13.8).
Рис. 13.1
|
|

| Полюсный наконечник |
| Обмотка возбуждения |
| - Сердечник дополнительного полюса |
| Сердечник главного полюса |
| Рис. 13.2 |
Главный полюс состоит из сердечника, набранного из листовой стали и укрепленного болтами на станине, и обмотки возбуждения. Сердечник на свободном конце снабжается полюсным наконечником для создания требуемого распределения магнитного потока.
Станина является ярмом машины, т. е. частью, замыкающей магнитную цепь главного потока Ф (рис. 13.1). Она изготовляется из литой стали, так как магнитный поток в ней относительно постоянен. Дополнительные полюсы устанавливаются на станине между основными. На сердечниках дополнительных полюсов располагаются обмотки, которые соединяются последовательно с якорем (рис. 13.2).
|
Рис. 13.3 |

Якорем называют часть машины, в обмотке которой при вращении ее относительно главного магнитного поля индуктируется ЭДС. В машине постоянного тока якорь (рис. 13.3) состоит из зубчатого сердечника 1, обмотки 2, уложенной в его пазах, и коллектора 3, на-
Рис. 13.5
саженного на вал якоря. Сердечник якоря набирается из листов электротехнической стали толщиной 0,5 мм, изолированных друг от друга лаком.
Для отвода тока от коллектора служат щетки, установленные в щеткодержателях (рис. 13.4). Щетку 1 к коллектору прижимает пружина 2. Ток от щетки отводится специальным гибким кабелем. Щеткодержатели надеваются на щеточную траверсу (отверстие 3), от которой они электрически изолируются. Траверса крепится соосно с якорем так, что ее можно поворачивать, изменяя положение щеток по отношению к полюсам машины.
У всех электрических машин постоянного тока есть коллектор. Это полый цилиндр, собранный из изолированных друг от друга клинообразных медных пластин 1 (рис. 13.5). Пластины коллектора изолированы также от вала машины. Проводами 2 они соединяются с витками обмотки, размещенной в пазах якоря. Вращающаяся обмотка соединяется с внешней цепью скользящим контактом между щетками и коллектором.
Дата добавления: 2018-02-28; просмотров: 921; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!