Система активного распределения крутящего момента
Полноприводная трансмиссия
Общие положения
Автомобили, у которых все колеса ведущие, называют полноприводными. Если крутящий момент передается на все колеса, улучшается способность автомобиля двигаться в плохих дорожных условиях. Это послужило толчком к созданию огромного семейства внедорожных автомобилей. Такие автомобили называют автомобилями повышенной проходимости. В некоторых странах легковые автомобили повышенной проходимости принято называть SUV (Sport Utility Vehicle – автомобили для спорта) или RV (Recreational Vehicle – автомобили для отдыха). Некоторые автомобили С приводом на четыре колеса обозначают AWD (All Wheel Drive – все колеса ведущие) или AD (4 Wheel Drive – привод на четыре колеса), а иногда просто 4x4.
Сейчас имеется большой выбор полноприводных автомобилей, предназначенных для движения по дорогам с усовершенствованным покрытием. Большинство мировых производителей легковых автомобилей в своей номенклатуре серийных автомобилей имеют вариант с приводом на все колеса.
Трансмиссия полноприводного автомобиля конструктивно сложнее, дороже и тяжелее, чем у автомобиля с двумя ведущими колесами. Кроме того, механические потери в такой трансмиссии выше. Дополнительная масса и потери мощности снижают общие показатели и ухудшают топливную экономичность автомобиля. В то же время сопротивление качению ведущих колес меньше, чем ведомых, что в некоторой степени (но не полностью) компенсирует потери. Несмотря на недостатки полного привода, его преимущества часто являются более важными. Очевидно, что помимо улучшения внедорожных свойств, полный привод мощного автомобиля дает преимущества при движении по скользкой дороге и обеспечивает более интенсивный разгон. Влияние полного привода на управляемость и устойчивость более сложное, но несомненно, что полный привод дает преимущество в устойчивости на скользких дорогах, а главное – он обеспечивает более легкое управление автомобилем в критических ситуациях. На сухих дорожных покрытиях с высоким сцеплением преимущества такого привода не столь очевидны.
|
|
|
Для автомобилей повышенной проходимости важно не только обеспечить хорошее сцепление колес с опорной поверхностью, но и обеспечить большой дорожный просвет, чтобы автомобиль не застрял на неровностях дороги. Кроме того, внедорожные автомобили, как правило, оборудуются трансмиссиями с понижающей передачей, которая дает возможность увеличить крутящий момент, подводимый к ведущим колесам, и обеспечить уверенное движение на малых скоростях.
Легковые автомобили с приводом на четыре колеса могут иметь или постоянный привод всех колес, или подключаемый ко всем колесам при необходимости. Существуют конструкции полноприводных трансмиссий, в которых обеспечивается постоянный привод на передние (автомобили Toyota RAV4, Honda CRV и др.) или задние колеса (автомобили Ford Explorer, Nissan Terrano и др.), а привод на другие два колеса включается при необходимости. Причем это включение может происходить автоматически, в зависимости от условий движения, или вручную по желанию водителя.
|
|
|
В любом автомобиле, имеющем привод на четыре колеса, независимо от расположения двигателя, необходимо разделить крутящий момент, получаемый на ведомом вале коробки передач, на два направления и передать один к переднему мосту, а другой к заднему. Кроме того, требуются две главные передачи: одна для привода передних колес, а другая задних соответственно.
При движении автомобиля по криволинейной траектории каждое из четырех колес автомобиля проходит различный путь. Следовательно, каждое колесо совершает при повороте разное число оборотов.
То же самое происходит при прямолинейном движении автомобиля, если диаметры колес отличаются (различный износ шин, разное давление в шинах). Как было показано выше, для уменьшения неизбежных потерь при движении автомобиля необходимо применять дифференциал. Автомобиль с четырьмя ведущими колесами должен иметь три дифференциала, по одному между колесами передней и задней осей (межколесные дифференциалы) и один между осями автомобиля (межосевой дифференциал).
|
|
|
Полноприводные версии легковых автомобилей, которые не предназначены для движения по бездорожью, имеют в своей основе стандартную версию легкового автомобиля. Некоторые легковые автомобили выпускаются только в полноприводном варианте и не имеют аналогов с приводом на одну ось. Примером могут послужить многие автомобили Subaru или автомобиль Jaguar типа X. Наиболее просто переоборудовать в полноприводный вариант переднеприводный автомобиль с продольным расположением двигателя и коробки передач (большинство автомобилей Audi). В таком варианте крутящий момент к задней оси поступает от коробки передач через карданную передачу. Задняя ось дополняется главной передачей, а межосевой дифференциал устанавливается в картере коробки передач.
Если базовый автомобиль имеет привод только на задние колеса, а двигатель расположен спереди, при его переоборудовании в полноприводный вариант не обойтись без раздаточной коробки с межосевым дифференциалом, которая может быть объединена с коробкой передач.
|
|
|
Переднеприводные автомобили с поперечным расположением двигателя гораздо труднее переделать в полноприводный вариант. Обычно картер главной передачи располагают за двигателем и используют карданную передачу, соединяющую переднюю главную передачу с дополнительной главной передачей задней оси.
Для любого автомобиля с четырьмя ведущими колесами важно обеспечить движение автомобиля в случае, если одно из колес теряет сцепление с дорогой.
Если одно из колес на оси буксует, то дифференциал передает на другое крутящий момент, недостаточный для движения. Если автомобиль имеет привод на четыре колеса и три дифференциала, то достаточно попасть одним колесом на скользкую поверхность, чтобы лишить автомобиль способности тронуться с места. Существуют различные способы борьбы с этим нежелательным свойством.
Один из таких способов это блокировка дифференциала. При заблокированном дифференциале крутящий момент, подводимый к колесам с лучшим сцеплением, увеличивается. Необходимо учитывать, что, если вся величина крутящего момента передается в одном направлении, карданный вал и полуоси должны быть сделаны более прочными, чтобы исключить возможность их поломки. Внедорожные автомобили, работающие в сложных условиях, могут иметь устройства, блокирующие как межосевой, так и задний межколесный дифференциалы. Блокировка дифференциала передней оси обычно не предусматривается из-за негативного воздействия на управляемость автомобиля.
Другим распространенным способом улучшения характеристик трансмиссий современных полноприводных автомобилей является применение различных устройств повышенного трения, применяющихся в качестве межосевых и задних дифференциалов. Самый простой способ заключается в создании дополнительного трения при проскальзывании деталей в дифференциале. Здесь, однако, требуется ограничить величину проскальзывания таким образом, чтобы оно не оказывало чрезмерного влияния на возможность движения колес автомобиля с небольшой разницей в угловых скоростях при обычном повороте. Таким образом, дифференциалы повышенного трения должны быть такими, чтобы передавать только часть крутящего момента на колесо с хорошим сцеплением.
Следует помнить что любой дифференциал повышенного трения, независимо от места его расположения (в раздаточной коробке или ведущих мостах) отнимает часть механической энергии переводя ее в тепло, а значит увеличивает расход топлива. Повышается также изнашивание шин и трансмиссии в целом. Гораздо лучше, если дифференциал сможет «почувствовать» момент начала проскальзывания колеса и сумеет перераспределить крутящий момент на отстающее колесо. Другими словами, желательно использовать самоблокирующийся дифференциал.
Система активного распределения крутящего момента.
Система активного распределения крутящего момента ATTS (Active Torque Transfer System) служит для улучшения управляемости автомобиля.
При повороте автомобиля на колеса автомобиля действуют две главные силы – тяговая, ускоряющая автомобиль и боковая, которая заставляет автомобиль поворачивать. Обе они связаны с силой трения, возникающей в пятне контакта. Сила трения в свою очередь, ограничена лимитированными сцепными свойствами шины и покрытия.
Рассмотрим распределение сил на колесах при повороте автомобиля (рис.10.30).

Рис. 10.30. Распределение сил на колесах автомобиля при повороте:
а) обычного автомобиля; б – автомобиля с системой активного распределения крутящего момента
При повороте из-за действия центробежной силы внутреннее колесо оказывается разгруженным, то есть оно находится в худших условиях по сцеплению с дорогой. Соответственно, уменьшится и та суммарная сила, сложенная из тяговой и боковой, которую может воспринять колесо, и поэтому оно в меньшей степени будет способно ускорять и поворачивать автомобиль. Система ATTS перераспределяет крутящий момент между ведущими колесами, убирая излишек тяговой силы с внутреннего колеса и перебрасывая его на более нагруженное внешнее. В результате у малонагруженной внутренней шины, освобожденной от излишка тяги, появляется больше возможностей для реализации боковой силы, так необходимой в повороте.
Увеличение крутящего момента на наружном колесе позволяет создать дополнительный момент, который стремится «затащить» автомобиль в поворот.
Задача перераспределения крутящего момента не только между левым и правым колесами, но и задней и передней осями, решена компаниями «Хонда» и «Мицубиси».
Система электронного управления (рис. 10.31) включает в себя датчики угла поворота, бокового и углового ускорения, скорости вращения колес, частоты вращения коленчатого вала двигателя и давления воздуха на впуске, передаточного отношения в трансмиссии.

Рис. 10.31. Схема трансмиссии полноприводного автомобиля Mitsubishi Lancer Evolution VIII:
1 – коробка передач; 2 – двигатель; 3 – муфта блокировки межосевого дифференциала; 4 – блок управления дифференциалами; 5 – датчик угла поворота рулевого колеса; 6 – датчик положения дроссельной заслонки; 7 – колесные датчики АБС; 8 – датчики продольного ускорения; 9 – датчики поперечного ускорения; 10 – задний активный дифференциал; 11 – гидронасос с гидроаккумулятором; 12 – лампа стоп-сигнала; 13 – датчик включения стояночного тормоза; 14 – индикатор переключения режимов: асфальт/гравий/снег; 15 – блок управления АБС; 16 – передний дифференциал; 17 – межосевой дифференциал (50:50)
Информация от всех датчиков поступает в компьютер, рассчитывает оптимальное распределение крутящего момента по колесам. Далее электронный блок управления передает информацию блоку управления дифференциалом для распределения момента между осями и задними колесами в соответствии с условиями движения. На нужную ось он перераспределяет от 30 до 70% момента, на одно из задних колес – от 0 до 100%. В обычных условиях до 70% крутящего момента передается на передние колеса. При больших ускорениях до 70% крутящего момента поступает на заднюю ось для улучшения динамики разгона и одновременной стабилизации движения. При ускорении в повороте почти 100% крутящего момента может передаваться на заднее внешнее колесо (рис. 10.32). Диаметрально противоположная картина возникает при снижении скорости на изгибе дороги – крутящий момент будет передаваться на внутреннее колесо.
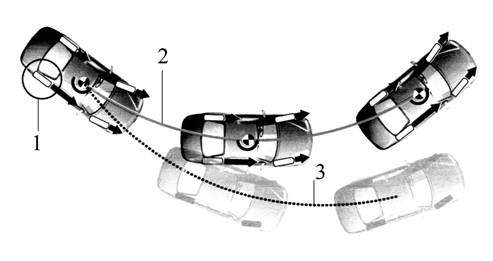
Рис. 10.32. Траектория движения автомобиля с электронным приводом управляемых колес:
1 – наибольший крутящий момент; 2 – траектория движения автомобиля с электронным приводом управляемых колес; 3 – автомобиля без электронного привода управляемых колес
Существуют различия в приводе дисков сцеплений приводов колес. Компания «Мицубиси» в своих конструкциях применяет электрогидравлический привод, а компания «Хонда» – электромагнитный.
В дифференциале автомобилей «Хонда» применяются электромагнитные многодисковые сцепления 7 (рис. 10.33). Каждое сцеплениеиндивидуально передает крутящий момент к одному из задних колес, правому или левому. Встроенные электромагнитные соленоиды 5 изменяют положение сердечника магнита относительно его корпуса. Блок управления дифференциалом, в зависимости от условий движения определяет какой ток подать на магнит – тем самым, сжимая пакеты дисков и плавно меняя распределение крутящего момента. Оба сцепления способны работать независимо друг от друга.
Модули сцепления дополнены собственными планетарными передачами 6.
Вместе с дифференциалом работает ускорительный модуль А, позволяющий сделать более надежным поведение автомобиля в крутых поворотах. Он принудительно «подкручивает» задние колеса в виражах.
В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в том, что при традиционной схеме трансмиссии заднее внешнее колесо вращается медленнее передних и тем самым препятствует полноценной передаче мощности. Как результат - ухудшение управляемости и риск заноса. Эту проблему решает ускорительный блок А.

Рис. 10.33. Привод задних колес с электромагнитным сцеплением:
1 – гипоидная передача; 2 – гидравлический привод; 3 – планетарная передача; 4 – сцепление; 5 – соленоид; 6 – планетарная передача; 7 – сцепление; А – ускорительный модуль; Б – блок электромагнитного сцепления
Общий вид реального привода задних колес (блок Б) показан на рис. 10.34.

Рис. 10.34. Общий вид редуктора привода задних колес (позиции аналогичны рис.10.33)
Во время движения по прямой, шестерни планетарной передачи вращаются синхронно с карданным валом – скорость передних и задних колес одинакова. При входе автомобиля в поворот гидравлический привод посредством еще одного, уже третьего по счету модуля сцепления 4 включает планетарную передачу 3 в работу, при этом заднее колесо с нужной стороны «подкручивается» до оптимальной скорости.
Блок управления, воспринимая сигнала датчиков, может определять стиль вождения. Когда автомобиль едет прямо, фрикционы разомкнуты и планетарные шестерни системы вращаются вхолостую, дифференциал поровну распределяя идущий от двигателя крутящий момент между ведущими колесами.
Если водитель вводит автомобиль в поворот, держа ногу на педали акселератора, реакция электронной системы управления будет отличаться от ситуации, когда автомобиль описывает дугу по инерции или при торможении. При этом один из фрикционов с помощью исполнительного устройства частично или полностью блокируется, при этом крутящий момент на колесах изменяется, что позволяет перераспределить его до 80% с противоположного колеса.
При резком трогании с места у полноприводных автомобилей возникает дефицит крутящего момента на колесах задней оси и избыток – на передней. Чтобы этого не происходило, система оборудована датчиком ускорения, фиксирующим момент, когда необходимо перебросить энергию к задней оси. При спокойном режиме движения больший момент передается на передние колеса, способствуя более стабильному поведению автомобиля.
Муфта Haldex
Муфта Haldex широко используется фирмой Volkswagen для автомобилей класса А (Volkswagen Golf, Bora, Audi TT, Skoda Oktavia, Seat Toledo и т.д.). С одной стороны, она предлагает преимущества постоянного привода на все колеса, с другой — она может комбинироваться с такими системами, предотвращающими пробуксовку колес, как ABS, EDS, ASR, EBV и ESP.
В отличие от традиционных систем постоянного привода система «4 motion» имеет ряд преимуществ: автомобиль сохраняет характеристику переднеприводного, время срабатывания муфты очень мало, различные размеры шин (аварийное колесо) не вызывают никаких проблем, и заклинивания в приводе при парковке или маневрировании больше не происходит. Конструктивно муфта Haldex устанавливается в том же месте, где раньше располагалась вязкостная муфта, а именно – непосредственно на заднем мосту (рис. 10.35). Вместе со всеми компонентами, включая блок управления, это компактный узел, который приводится в действие от карданного вала.

Рис. 10.35. Общая компоновка автомобиля с муфтой Haldex
Принцип работы муфты Haldex. Механическая часть муфты Haldex состоит из цилиндрического входного вала с аксиально-поршневым насосом и рабочим поршнем, ведомого вала с приводной головкой и дисковым кулачком, а также набора фрикционных дисков (рис. 10.36). Наружные диски соединены с ведущим валом, а внутренне диски через продольное зубчатое зацепление с ведомым валом.

Рис. 10.36. Схема муфты Haldex:
1 – ведомый вал с кулачковой шайбой; 2 – рабочий поршень; 3 – многодисковая муфта; 4 – насосный поршень; 5 – нагнетательный клапан; 6 – впускной клапан; 7 – регулятор давления управления муфтой; 8 – ведущий вал
При пробуксовке одного из колес автомобиля возникает разница в частоте вращения между ведомым 1 и ведущим 8 валами, и на поршень 4 направляется то выступающая, то опускающаяся часть кулачковой шайбы. В результате возвратно-поступательного движения поршня давление масла в гидравлической системе повышается и рабочий поршень давит на нажимной диск набора фрикционных дисков. Набор фрикционных дисков сжимается, и между входным и выходными валами возникает таким образом сцепление.
Гидравлическая часть муфты Haldex состоит из электрического подпиточного насоса 9, масляного фильтра 10, впускных 11 и нагнетательных 3 клапанов, регулятора давления 5 с регулировочным клапаном, предохранительного клапана 4 и гидроаккумулятора 6 (рис. 10.37). Для того чтобы система могла быстро срабатывать, подпиточный насос, начиная с частоты вращения 400 об/мин, нагнетает в гидравлической системе муфты давление подпитки 4 кгс/см2. Давление подпитки поддерживается гидроаккумулятором и воздействует как на поршень насоса, так и на рабочий поршень. Преимуществом такой компоновки, является то, что, с одной стороны, поршень насоса прилегает к дисковому кулачку и, с другой стороны, благодаря легкому давлению подпора устраняется зазор из набора фрикционных дисков.
Гидроаккумулятор наряду с поддержанием давления подпитки имеет еще одну задачу – выравнивать колебания давления в системе. При отсутствии давления в питающей магистрали пружина аккумулятора максимально разжата и масло через аккумулятор из питающей магистрали не сбрасывается. Повышение давления в питающей магистрали ограничивается на заданном уровне за счет перепуска масла из нее через аккумулятор в резервуар для его сбора. При понижении давления пружина аккумулятора разжимается, уменьшая или полностью прекращая сброс масла в емкость.
Предохранительный клапан предотвращает подъем управляющего давления свыше 100 кгс/см2, защищая детали муфты от перегрузок. Клапан открывается, если действующее на его запорный орган давление преодолевает усилие предварительно сжатой пружины. При повышении давления до 100 кгс/см2 клапан открывается, перепуская масло в питающую магистраль и в резервуар через гидроаккумулятор, в результате чего давление масла в системе снижается до заданного уровня.
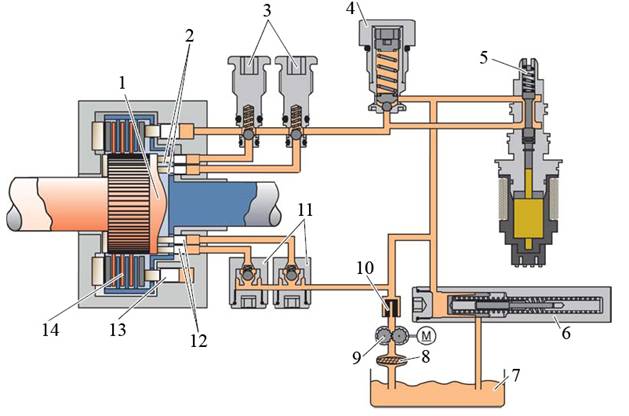
Рис. 10.37. Гидравлическая часть муфты Haldex:
1 – кулачковая шайба; 2 – толкающие ролики насосных поршней; 3 – нагнетательные клапана; 4 – предохранительный клапан; 5 – регулятор давления управления муфтой; 6 – гидроаккумулятор; 7 – резервуар рабочей жидкости; 8 – сетчатый масляный фильтр; 9 – электронасос; 10 – фильтр; 11 – впускные клапана; 12 – насосные поршни; 13 – рабочий поршень; 14 – пакет дисков
Основной элемент гидравлики – регулировочный клапан регулятора давления (рис.10.38), определяет величину давления на диски и управляется от исполнительного двигателя, который в свою очередь работает по сигналам блока управления.

Рис. 10.38. Регулировочный клапан:
1 – сливное отверстие;2 – регулировочный клапан; 3 - регулировочный штифт; 4 – приводной двигатель; 5 – зубчатое колесо
Когда регулировочный клапан закрыт (рис.10.39, а), то при разнице в частоте вращения между входным и выходным валами создается рабочее давление, величина которого ограничивается предохранительным клапаном. Крутящий момент через муфту передается на задний мост.

Рис. 10.39. Работа регулировочного клапана:
а) клапан закрыт; б) клапан открыт частично; в) клапан открыт полностью
При частично открытом регулировочном клапане (рис. 10.39, б) муфта допускает определенное проскальзывание, т.е. крутящий момент на задние колеса передается лишь частично. Когда регулировочный клапан открыт полностью (рис. 10.39, в), рабочее давление создаваться не может, и крутящий момент через муфту не передается. Однако давление понижается не полностью, а частично благодаря гидроаккумулятору до уровня давления подпитки.
Блок управления через шину данных (CAN-Bus) получает от ABS информацию о частоте вращения колес, продольном ускорении, сигнале торможения и включении ручного тормоза. Если автомобиль дополнительно оснащен ESP, то регулировка ESP имеет преимущественное право перед функцией привода всех колес. Блок управления двигателя также через CAN-Bus выдает информацию о частоте вращения двигателя и положении педали акселератора. Наряду с входными сигналами через CAN-Bus блок управления Haldex получает также дополнительные сигналы непосредственно от выключателя сигнала торможения ручного тормоза (муфта размыкается при включенном ручном тормозе) и от датчика температуры муфты. Чтобы предотвратить перегрев, функции муфты отключаются при температуре масла свыше 100 °С.
Выходные сигналы блока управления муфты – это напряжение питания для масляного насоса и возбуждение исполнительного двигателя регулировочного клапана. Блок управления может имеет функцию самодиагностирования. Если отсутствует какой-либо сигнал, блок управления рассчитывает резервное значение этого сигнала для включения аварийного функционирования.
Вискомуфта
Вискомуфта получила свое название от латинского viscosus - вязкий.
Основными элементами вискомуфты (рис.10.40) являются:
- корпус 6 и валы 1 и 5, герметизированные с помощью уплотнений;
- диски 4, соединенные шлицами с корпусом, диски 3 соединенные с ведомым валом. Диски имеет каналы и отверстия для увеличения вязкости трения жидкости;
- силиконовая (кремнийорганическая) жидкость, которая обладает высокой вязкостью и заполняет корпус на 80-90%.

Рис. 10.40. Вискомуфта:
1– ведомый вал; 2 – втулка; 3 – диски, соединенные с ведомым валом; 4 – диски, соединенные с корпусом; 5 – ведущий вал; 6 – корпус
Вискомуфта передает подводимый к ней крутящий момента за счет внутреннего трения в жидкости, находящейся между дисками. Когда их скорости одинаковы, муфта передает небольшую часть усилия (5…7%). При отставании ведомых дисков от ведущих, жидкость перемешивается, температура и вязкость ее растут, она расширяется и сжимает воздух. Когда он почти полностью сжат, давление в муфте резко возрастает, что вызывает осевое перемещение дисков по шлицам до их механического контакта. В результате этого вращение ведущего и ведомого валов производится за счет механического трения. При равной скорости вращения дисков температура и соответственно давление жидкости постепенно снижаются и они выходят из механического контакта. Передаваемый момент зависит от характеристик муфты и от разности скоростей вращения ее валов.
Вискомуфта может устанавливаться как самостоятельный узел между ведущими осями или «встраиваться» в конический дифференциал.
Основным недостатком вискомуфты является ее несовместимость с ABS.
Вискомуфта не пригодна к ремонту, так как количество и вязкость жидкости определяют характеристики вискомуфты и строго контролируются при ее изготовлении. При утечке части жидкости муфта подлежит замене.
10.4.5. Дифференциал Torsen
Дифференциал Torsen (TORque SENsing — чувствующий крутящий момент) представляет собой механический самоблокирующийся дифференциал, в котором используется сложный набор червячных шестерен (рис. 10.41).
На полый приводной вал 2 корпуса дифференциала передается крутящий момент от коленчатого вала через элементы трансмиссии. На общей оси сателлитов расположены прямозубые шестерни 5 и червячные сателлиты 6.
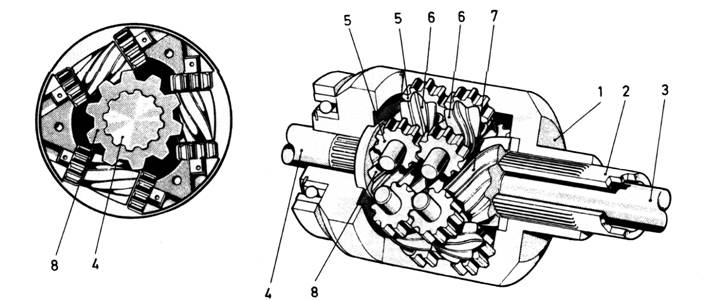
Рис. 10.41. Межосевой дифференциал Torsen:
1 – корпус дифференциала; 2 – полый приводной вал корпуса дифференциала; 3 – вал привода передней оси; 4 – вал привода задней оси; 5 – прямозубые шестерни; 6 – червячные сателлиты; 7 – червячная шестерня привода передней оси; 8 – червячная шестерня привода задней оси
Набор шестерен внутри дифференциала состоит из ведомых червячных шестерен привода передней оси 7, задней 8 и ведущих (сателлитов) червячных шестерен 6. Основной особенностью такой конструкции является то, что червячные шестерни могут приводить во вращение другие шестерни, но сами не могут приводиться во вращение. Такая особенность приводит к появлению некоторой степени блокирования дифференциала.
При вращении приводного вала вращается и корпус дифференциала, толкая оси сателлитов. При движении по асфальту дифференциал Torsen распределяет крутящий момент между осями поровну. При низких значениях входного крутящего момента, передаваемого от коленчатого вала (движение по асфальту), шестерни дифференциала вращаются свободно и его действие напоминает работу обычного симметричного дифференциала. Когда входной крутящий момент увеличивается (колеса одной оси начинают проскальзывать), набор червячных шестерен нагружается и в определенный момент два выходных вала привода передней и задней оси блокируются. Но стоит только колесам одной оси начать проскальзывать, крутящий момент перебрасывается на ту ось, колеса которой имеют лучшее сцепление с покрытием.
В зависимости от величины передаточного числа и конструкции дифференциала, крутящий момент может распределяться по осям автомобиля в соотношении от 2,5:1 (60 % : 40 %) до 6:1 (84 % : 16 %) или даже до 7:1 (86 % : 14 %), а также распределяться в любых промежуточных значениях.
Дифференциал Torsen имеет линейную характеристику, перераспределение крутящего момента происходит практически мгновенно и он не оказывает влияния на процесс торможения, в отличие от вязкостной муфты, где на разогрев силиконового вещества и его застывание требуется некоторое время. Эти свойства механизма обусловили его широкое использование в качестве межколесных и межосевых дифференциалов автомобилей. Основным недостатком является сложность его изготовления и сборки и, как следствие, высокая стоимость.
Дата добавления: 2018-02-28; просмотров: 1759; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!