Классификация систем управления оборудованием (на примере промышленных роботов). Упр-е дистанционное, интерактивное, командное, супервизорное, диалоговое.
Понятие о задачах управления. Функции систем управления. Основная терминология. Упр-е – ряд целенаправленных возд-й на объект упр-я, обеспеч-х безусловное выполнение возложенных на него функций. Упр-е может осуществляется по 3-м различным уровням: 1. От органа управления 2. От более сложного управляющего устройства 3. От Сист Упр-я, примен в особо сложных и ответств-х случаях Функцией систем управления является обеспечение автономной работы оборудования без непосредственного участия человека, а также обеспечение условий протекания техпроцесса мех обработки детали и сборки изделия. Конкретными задачами также являются: изменение режимов резания, траектории движения инстр, изменение послед-ти технол-х переходов и т.д. Как отдельная форма рассматривается ручное управление. Объект управления - широкий круг различного рода устройств различного назначения, а так же и сам процесс изготовления детали их транспортирования и сборки изделия. Виды объектов управления: 1. Устойчивые объекты управления – это такой ОУ который после снятия возмущающего воздействия стремится вернуться в исходное, состояние. Такие ОУ могут функционировать без прим-я специальных устройств так называемых “регуляторов”. 2. Нейтральный ОУ – их состояние зависит от момента прекращения возмущающего воздействия. 3. Неустойчивые ОУ - они остаются в том положении, которое было ими достигнуто при приложении возмущающего воздействия, независимо от времени снятия воздействия. Автоматическая система – это совокупность ОУ и управляющего им устройства. В свою очередь их делят на 2 разновидности: 1. Системы автоматического управления (САУ) – т.е. такие системы, которые обеспечивают управление данным объектом по заданному закону. 2. Системы автоматического регулирования (САР) – их назначение заключается в поддержании заданного параметра на требуемом определенном уровне 2. Основная терминология Техническая система – это замкнутая система, состоящая из нескольких взаимосвязанных элементов, находящихся в непосредственном взаимодействии с окружающей производственной средой. Технологическая система - совокупность механизмов, приспособлений и инструмента, самих обрабатываемых деталей и основного технологического оборудования, предназначенная для реализации того или иного этапа техпроцесса. Интерфейс - устройство сопряжения систем предназначенное для их взаимосогласованной работы. Сигнал - отображение информации с помощью специальных носителей, когда сигнал имеет собственный параметр. Аналоговый –когда указанный информационный параметр может в заданных границах принимать любые значения. Дискретный - когда указанные параметры в заданных пределах могут принимать ограниченное количество значений. Виды сигналов: - Входной сигнал X(x1;x2;…;xi) – возмущающие или управляющие воздействия, подаваемые на вход данного элемента или целой системы. - Выходной сигнал Y(y1;y2;…;yi) – управляемы параметры изменение, кот-х явл-ся следствием возд-вия входных сигналов. - Управляемый сигнал U-сигнал, подаваемый непосредственно от управляющего устройства на объект управления. - Возмущающий сигнал Z – Это воздействие, которое оказывается на элемент управления со стороны внешней среды. Это воздействие негативно и может заключаться в колебании температуры, наличии вибраций. Автоматическая система – это совокупность ОУ и управляющего им устройства. В свою очередь их делят на 2 разновидности: 1. Системы автоматического управления (САУ) – т.е. такие системы, которые обеспечивают управление данным объектом по заданному закону. 2. Системы автоматического регулирования (САР) – их назначение заключается в поддержании заданного параметра на требуемом определенном уровне Объект управления - широкий круг различного рода устройств различного назначения, а так же и сам процесс изготовления детали их транспортирования и сборки изделия. Виды объектов управления: 1. Устойчивые объекты управления – это такой ОУ который после снятия возмущающего воздействия стремится вернуться в исходное, состояние. Такие ОУ могут функционировать без применения специальных устройств так называемых “регуляторов”. 2. Нейтральный ОУ – их состояние зависит от момента прекращения возмущающего воздействия. 3. Неустойчивые ОУ - они остаются в том положении, которое было ими достигнуто при приложении возмущающего воздействия, независимо от времени снятия воздействия. 3. Управление разомкнутое и замкнутое. Регулирование. В производстве применяется два вида управления обектами: - разомкнутое. Преимущества: простота схемы управления, более высокое быстродействие. Недостаток – пониженная точность получаемых выходных параметров. - замкнутое. «+» повышенная точность параметров на выходе; «-» более сложная элементная база из-за наличия спец-х устройств (датчиков). Д – Датчик (первичный преобразователь информации) предназначен для определения величины контролируемого параметра и выработки соответствующего сигнала, который подается на вход системы на элемент сравнения ЭС. Несколько примеров принципиальных схем регулирования: 1. Регулирование давления воздуха в кабине: 1-камера, где регулируется давление воздуха; 2-датчик давление внутри камеры (электроконтактный манометр); 3-регулятор давления; W-информация о заданном значении давления, которая вводится заранее; 4-исполнительный механизм малых перемещений; 5-объект управления-регулируемый вентиль. 2. Регулирование давления жидкости в трубопроводе 1-трубопровод для подачи жидкости; 2-измерительная диафрагма; 3-манометр; 4-регулятор давления; 5-гидропривод, осуществляемый малые перемещения; 6-заслонка, регулируемая расход жидкости через трубопровод. 3. Центробежный регулятор (регулятор Уатта). Для регулирования частоты вращения w используется регулятор, содержащий вал1, муфту 2, перемещающуюся по валу вдоль его оси, имеется двуплечий рычаг позиция3 он связан с муфтой, а второй конец рычага используется для получения нужного перемещения i1 или i2 и для воздействия на какой либо регулируемый элемент (заслонки) 4 – система шарнирно закрепленных рычагов, 5 – груз заданной массы. При превышении заданного значения w возрастает частота вращения вала w1, в результате под действием центробежных сил грузы 5 поднимаются, перемещая муфту вверх, а рычаг 3 повернется в направлении i2, то есть происходит постоянное регулирование вращения выходного вала. 6. Разновидности САУ: программное, адаптивное, интеллектное. Их особенности и область применения в управлении производственными объектами üИнтеллектное управление – они предназначены для поддержания заданного значения управляемой величины. ü Системы программного управления - обеспечивают изменение заданного параметра во времени по заданной программе. üАдаптивные системы управления – позволяют управлять объектом или процессом в зависимости от накопления текущей информации, поступающей в СУ, как об изменении управляемого параметра, так и информации об изменении внешних условий (Пример: непостоянство механических свойств заготовки по длине обрабатываемой детали) ИМ – исполнительный механизм осуществляет малые поднастроечные перемещения УС – устройство синтеза требуемых поднастроек; УОВВ – устройство оценки внешних воздействий; УОП – устройство оценки процессов обработки (датчики); ОС – обратная связь. 4 Особ-ти современного произв-ва с точки зрения упр-я. Уровни в структуре произв-ва как в объекте упр-я.
|
|
|
|
|
|
|
|
|
|
|
|
Классификация систем управления оборудованием (на примере промышленных роботов). Упр-е дистанционное, интерактивное, командное, супервизорное, диалоговое.
В завис от сложн-ти разраб-мых систем существуют 3 уровня:
1. Каждая единица металлорежущего оборудования снабжается отдельным промышленным роботом, он выполняет простейшие движения по захвату, переносу заготовки на станок, а также производит аналогичные движения для снятия готовой детали.
 Для работы данного оборудования необходимо дополнительное устройство, называемое накопителем.
Для работы данного оборудования необходимо дополнительное устройство, называемое накопителем.
«+» простота системы управления, т.к. обычно используется готовое ЧПУ станка,
«-» управлению подвергаются только лишь 1 станок и 1 робот.
Получается ГПМ (гибкий производственный модуль).
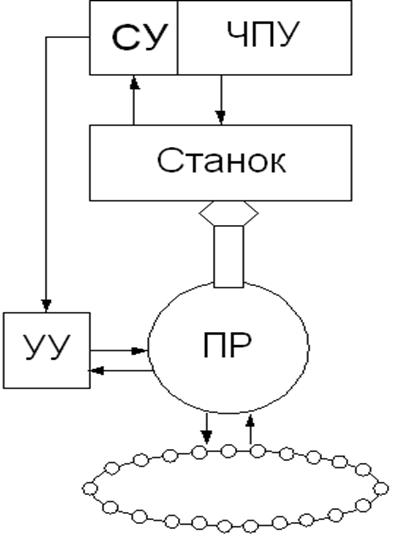
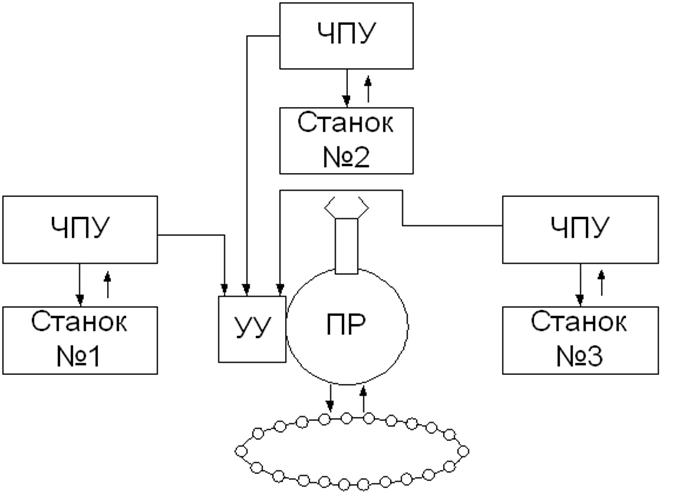
2. Управление группой технологического оборудования, которое объединяется в единую систему, где функции транспортировки деталей и их загрузки на станки возлагаются на единственный промышленный робот. Ему же передаётся функция транспортирования деталей между станками. В этом случае рекомендуется использовать робот с цилиндрической системой координат т.к. в этом случае можно использовать круговую компоновку расп-я станков.
«+» централизованное управление группой станков, используется 1 робот, что удешевляет проект.
«-» требуется увязка по времени работы всего оборудования.
3. Наиболее сложный вариант, когда в качестве управляющего устр-ва данного участка применяется ЭВМ.
В этом случае централизованное управление ЭВМ получает управление группой оборудования станков и самого робота, управление специальными транспортирующими устройствами, в этих условиях также производится автоматический контроль точности механической обработки, появляется функция диагностики состояния оборудования.
Упр-е дистанционное – вид упр-я обор-ем, кот-й производится на значительном удалении от самого исполнительного устройства. Применяется в случае наличия вредности или опасности на данном участке.

Управление интерактивное – такое управление, когда в работу САУ вмешивается оператор или наладчик данного участка. Это происходит в случае какой-либо необходимости, например при неопределённых условиях.
Командное упр-е – вариант управления, когда подаётся общая команда или указания к дальнейшим действиям объекта, упр-е происходит по собственному алгоритму.
Супервизорное упр-е – также является дистанционным, но базируется на примен соврем-х средств (камера слежения за объектом), а также применяют СТЗ (с-ма тех. зрения). Инф-ция передаётся на дисплей, где может находиться оператор.
Диалоговое упр-е – вид управления, когда между оператором и системой управления происходит взаимный обмен информацией в виде запросов и ответов.
9 Основные этапы функц-ния СУ общезаводского уровня
В масштабах всего машиностроительного предприятия можно выделить 4 этапа:
 Данная система управления предприятием носит сложный многоуровн-й характер. На уровне предприятия осуществляются межцеховые транспортные операции, функционируют отделы и службы (заводоуправле-ние), кроме того здесь же функционируют общезаводские склады и производится координация работы отдельных станочных модулей, производится управление транспортной системой участка, работой накопителей, постов контроля и т.д.
Данная система управления предприятием носит сложный многоуровн-й характер. На уровне предприятия осуществляются межцеховые транспортные операции, функционируют отделы и службы (заводоуправле-ние), кроме того здесь же функционируют общезаводские склады и производится координация работы отдельных станочных модулей, производится управление транспортной системой участка, работой накопителей, постов контроля и т.д.
Система оперативно-календарного планирования:
- Разработка стратегии всего предприятия с учетом изменяющейся внешней среды (снабжение материалами, энергией и т.п. на достаточно длительное время), а также учитываются вопросы сбыта готовой продукции;
- Учет и корректировка планов при поступлении “срочных заданий”
- Использование перспективного метода работы предприятия (точно вовремя), планирование поставок материалов, оборудования, чтобы исключить операции складирования.
В свою очередь планирование можно подразделить на:
- Перспективное планирование – планирование новых изделий, изменение объема выпуска продукции, а также возможное изменение ее номенклатуры.
- Текущее планирование – разрабатывается в соответствии с имеющимися возможностями (конкретные типы изделий, имеющееся техническое и кадровое обеспечение производства)
- Оперативное планирование – производится в зависимости от изменения конкретной ситуации под которую подстраивается производственный процесс).
Разрабатывается система связей между системой планирования и базой данных заводского уровня.
Система диспетчирования:
- Выполняется входной контроль материалов и заготовок;
- Проверяются поступающие комплектующие узлы
- Производится выходной контроль готовой продукции
- Производится испытание этой продукции с набором статистических данных
- Управление персоналом
- Диагностирование работы оборудования, выявление причин отказа
- Перераспределение различных материальных ресурсов между участками и цехами
Конечная цель – обеспечение ритмичного функционирования предприятия в соответствии с плановыми заданиями.
Система оперативного управления:
- Принятие заданий и команд на выполнение заданной работы оборудования
- Координация работы отдельных единиц оборудования
- Управление материальными потоками (распределение заготовок) в пределах данной станочной системы или участка.
Системы управления оборудованием:
- Непосредственное управление технологическим оборудованием
- Обоснованный выбор метода управления технологическим оборудованием.
Дата добавления: 2018-02-15; просмотров: 721; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!