Расчет деталей механизма подъема и опускания
Конструктивная разработка тележки для перевозки аккумуляторных батарей.
Назначение приспособления
При проведении ТО сельскохозяйственной техники приходиться заниматься ремонтом и обслуживанием аккумуляторов. Аккумуляторы имеют большой вес, а механизаторам приходиться поднимать и перемещать их в ручную. Для удобства осуществления технического обслуживания аккумуляторов и облегчения труда рабочих возникает необходимость в устройстве для перевозки аккумуляторных батарей. Существующие конструкции различных захватов для аккумуляторов решают лишь часть задачи, они облегчают перемещение батареи, но наиболее сложный момент это снятие батареи с машины, где приходиться с большой высоты перемещать их на землю. В данном проекте предложена конструкция тележки с подъемной платформой.
Тележка предназначена для перевозки батарей на большие расстояния, например из зоны ТО в аккумуляторный участок и обратно. Тележка, также, может быть использована для перевозки бутылей с серной кислотой.
Подъемная платформа тележки предназначена для поднятия и удержания аккумуляторных батарей (двух) на определенной высоте, при установке и снятии с автомобиля или трактора. Подъемная платформа также может быть использована для постановки и снятия аккумуляторных батареи со стеллажей для зарядки, хранения, а также верстаков.
Устройство и работа тележки
|
|
|
Тележка состоит из рамы, подъемной платформы, механизма подъема и опускания платформы, колес передней и задней оси.
Колеса одной оси являются поворотными. Поворотные колеса закреплены в вилках, которые вращаются на упорных подшипниках.
 Каркас платформы изготовлен из стальных гнутых равнополочных швеллеров, связанных между собой еще одним. Обвязка платформы выполнена из равнополочного уголка 2.5×2.5 мм.
Каркас платформы изготовлен из стальных гнутых равнополочных швеллеров, связанных между собой еще одним. Обвязка платформы выполнена из равнополочного уголка 2.5×2.5 мм.
Площадка платформы – стальной лист, который закреплен на каркасе прерывистым сварным швом.
К поперечному уголку приварен палец, за который поднимается платформа.
Все элементы платформы свариваются между собой ручной дуговой сваркой (электродом Э-42А).
Рама представляет собой сварную конструкцию из стальной холоднодеформированной трубы диаметром 28 мм и толщиной стенки 5мм. Балка рамы – равнополочный уголок 45 х 45 мм., к которому с концов приварены оси колес. В состав рамы входят верхний и нижний ролики цепи с корпусами. Корпус нижнего ролика является подвижным.
Механизм подъёма состоит из основания (поз. 1, см. спецификацию в приложении), блока колес (поз.2), вращающиеся втулки, которая притянута осью (поз. 5) и гайкой (поз.20) к основанию.
|
|
|
Ведущая шестерня (поз.6) фиксируется на валу (поз.10) с помощью сегментной шпонки. ОТ осевого смещения шестерню удерживает буртик вала и втулка (поз.8) на которой свободно вращается звездочка (поз.9).
Вал вращается в бронзовой втулке основания. На него на призматической шпонке (поз.28) посажены храповик (поз.13) и ступица (поз. 12). К последней с помощью двух болтов (поз.18) крепится рукоятка (поз.3).
Механизм подъема и опускания платформы через 4 штыря основания и гайки крепится к двум стяжкам рамы. Колеса тележки состоит из двух ступиц, между которыми зажата массивная резиновая шина. В одну из ступиц запрессована бронзовая втулка – подшипник скольжения.
Основная работа тележки состоит в перемещении и поднимании аккумуляторных батарей. Перемещается тележка следующим образом
исполнитель прикладывает физическую силу к ручкам рамы в продольном направлении относительно оси рамы, при прикладывании силы в поперечном направлении происходит поворот вилок задних колес вокруг оси вращения. Поднятие аккумуляторных батарей на определенную высоту будет выглядеть так:
Ø аккумуляторная батарея устанавливается на площадку платформы,
Ø исполнитель прикладывает усилие к рукоятке механизма подъема и опускания платформы в направлении движения часовой стрелки,
|
|
|
Ø усилие через вал (поз.10) передается на ведущую шестерню (поз.6),
Ø через зубчатое зацепление усиление передается блоку колес (поз.2) и через звездочку блока колес – приводной роликовой цепи.
Ø через связь, к которой прикреплены концы цепи, усилие передается на палец рамы (поз.1) за который и происходит поднятие платформы.
При опускании рукоятка вращается против часовой стрелки переведя защелку механизма в нижнее положение.
4.3 Выбор деталей тележки
Расчет деталей платформы
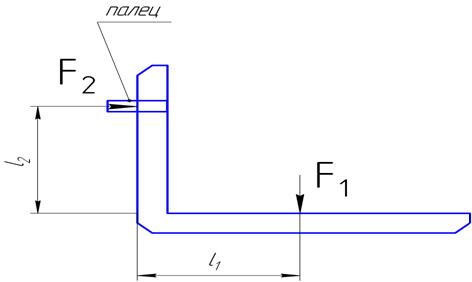

Рисунок 4.1 Силы действующие на платформу.
Сила F1 рассчитывается по формуле [6]:
F1= 2Ма g, (3.1)
где 2 – количество аккумуляторов,
Ма – масса аккумуляторных батарей 6 ст.78 с электролитом [ 8 ], кг;
g=10м/с – ускорение свободного падения,
F=2 ∙ 21,5∙10= 1430 Н
Условие прочности при изгибе продольной балки – стального равнополочного швеллера
σизг=10-6 Мх max/Wx≤[σизг] , (3.2)
где σизг – направление изгиба, Мпа;
|
|
|
Мх max – наибольший изгибающий момент, Н∙м;
Wx - популярный момент сопротивления при изгибе, м3;
[σизг] – допускаемое напряжение при изгибе [6, табл.14].
Положение нейтральной линии для сечения определяется по формуле из [6, стр. 73]
V0= 
Осевой момент инерции для сечения определяется по формуле[6, стр. 73]

Полярный момент сопротивления изгиба равен [6, стр. 73]

Наибольший изгибающий момент равен
Мx max=F1∙l1, (3.3)
где l1 – плечо действия силы F (см. рис. 3.1)
 Мx max=1430∙0,72=1030 Н∙м
Мx max=1430∙0,72=1030 Н∙м
Момент сопротивления увеличивается в два раза, так как две балки.
Тогда подставив значения в формулу (3.2) получим
σизг= 
Условие прочности на изгиб выполняется.
Из-за относительно большого плеча l1 действие силы необходимо произвести расчет на жесткость.
Условие жесткости балки
Vmax ≤ [V] , (3.4)
где Vmax – наибольший прогиб балки;
[V] = (1/500)∙l1 – допускаемая величина прогиба, устанавливается на основании эксплуатационных данных [6, стр.309]
Vmax =F1l1/3EJx , (3.5)
где Jx – осевой момент инерции, м4;
Е – модуль упругости [6, табл.1], Па
Vmax= 
Полученные значения Vmax и [V] подставляются в неравенство (3.4), тогда 0,68∙10-3≤1,44∙10-3 условие выполнено.
 Уголок №4 (поз.3) рассчитывается исходя из условия прочности при изгибе, по формулам описанным выше, момент сопротивления определяется по табл. 3.9 [3, том1]
Уголок №4 (поз.3) рассчитывается исходя из условия прочности при изгибе, по формулам описанным выше, момент сопротивления определяется по табл. 3.9 [3, том1]
Максимальный изгибающий момент Мx max по схеме 14 [6, том1] равен
Мx max=F2l2/8, (3.6)
где l2 – пролет уголка, м.
Сила F2 (Н) определяются по формуле
F2=(2Ма+Мп)∙g, (3.7)
где Мп – масса платформы, подсчитана по спецификации, кг
F2=(2∙21,5+24,0)∙10=1670 Н
Мx max=1670∙0,41/8=85,59 Н∙м
Известные величины подставляются в формулу (3.2)
σизг=10-6 ∙85,59/10-6 ∙1,6=53,5≤150мПа
Палец 4 (см. рис.7) рассчитывается из условия прочности на изгиб
Wx=πdп3/32, (3.8)
где dп – диаметр пальца.
Wx=3,14∙0,0173/32=0,48∙10-6м3
Мx max=1670∙0,035=58,45 Н∙м
σизг=  мПа
мПа
Условие прочности выполнено.
4.3.2Расчет деталей рамы
Ось верхнего ролика испытывают на напряжении среза по двум плоскостям.
Условие прочности на срез
τср=  [τср], (3.9)
[τср], (3.9)
где К – число плоскостей среза;
Sср – площадь среза, м2;
[τср] – допускаемое напряжение среза [6, стр.86], MПа.
При диаметре оси 10 мм площадь среза равна
Sср= 
τср= 
Условие прочности на срез выполнено.
Верхняя поперечная балка рассчитывается из условия максимального прогиба. (формула 23)
По схеме 14 [6, стр.84] максимальный прогиб равен:
Vmax=F2L3/192EJx,
где L3- длина балки, м.
Jх- основной момент сопротивления поперечного сечения трубы, м4.
Jx=  ,
,
где dт- наружный диаметр трубы, м;
S- толщина стенки трубы, м;
Jx= 
Vmax= 
 [V]=
[V]= 
Получение значение Vmax и [V] подставляются в неравенство (3.4)
0,115  условие жесткости выполнено.
условие жесткости выполнено.
Расчет деталей механизма подъема и опускания
Платформы
По суммарному весу платформы и поднимаемых аккумуляторных батарей – 1670 Н по табл. 1 [6, стр.427] выбирается однорядковая роликовая цепь типа: ПР – 12,7 – 120 – 1.
Платформа с аккумулятором батареей передвигается по цепи 2 на тянущую звездочку 9, которая тремя винтами притянута к зубчатому колесу 8. Зубчатое колесо через шестерню 3 связана с рукояткой 5

Рисунок 4.2 Схема механизма подъема и опускания платформы.
1 – верхний ролик; 2 – цепь; 3 – ведущая шестерня; 4 – промежуточная звездочка; 5 – рукоятка; 6 – связь; 7 – натяжной ролик; 8 – зубчатое колесо;
9 – тянущая звездочка.
Момент на тянущей звездочке должен быть больше величины
МтF2  /2, (3.10)
/2, (3.10)
где - диаметр делительной окружности звездочки, м.
Мт=1670  Н
Н 
Сила в зацеплении зубчатого колеса и шестерни будет равна:
F3=  (3.11)
(3.11)
где  k- диаметр делительной окружности зубчатого колеса
k- диаметр делительной окружности зубчатого колеса
F3= 
Момент на валу ведущей шестерни и рукоятке равен
Мв=F3  (5.13)
(5.13)
где  - диаметр ведущей шестерни, м.
- диаметр ведущей шестерни, м.
Мв=904,58 
Минимальное усилие на рукоятке, которое должен приложить исполнитель для поднятия платформы с аккумуляторной батареей равно:
Fp=Mв/l, (3.12)
где l - расстояние между осями вала и ручки рукоятки, м.
 FP= 10,85/0,28=38,8 Н.
FP= 10,85/0,28=38,8 Н.
т.к. срок службы цепной передачи ограничивается чаще всего долговечностью цепи, то необходимо провести проверку цепи по допустимой полезной силе, которую может передать цепь с шарниром скольжения.
F=  (3 .13)
(3 .13)
где [p] – допускаемое давление в шарнире цепи, MПа. [12, стр.257];
А – проекция опорной поверхности шарнира [12, стр.292];
Кэ – коэффициент эксплуатации [12, стр.256].
F= 
Полученное значение F меньше усилия в цепи F2, значит, цепь способна передавать данное усилие.
Усилие, передаваемое сегментной шпонкой на шестерню 3 равно:
Fшп= 
где dв – посадочный диаметр вала под шестерню, м;
Fшп=  .
.
Условие прочности шпонки на смятие
σст=  σсм ,
σсм ,
где Sсм – площадь смятения, выступающая из вала часть шпонки, м2.
[σсм] – дополнительное напряжение смятия [6, стр. 86] MПа.
Размеры выступающей части шпонки известен из таблицы 10 [6]
Sсм= k  (3.14)
(3.14)
где k – высота шпонки над валом, м.
l – длина выступающей части шпонки, м.
Д – диаметр шпонки, м.
Sсм= 0,0012 
σсм=  σсм]
σсм] 
Сегментная шпонки проверяется также на срез:
τср=  τср], (3.15)
τср], (3.15)
где Sср – площадь среза, м2.
[τср] – допуск напряжения среза
Sср=b 
где b – ширина шпонки, м.
Sср=0,003  .
.
τср=  [τср]=75 MПа
[τср]=75 MПа
Оба условия выполнены.
Зубчатое зацепление рассчитывается из условия контактной прочности зубьев [6, стр. 166]
σн=zеzεzн  [σн], (3.16)
[σн], (3.16)
где Ze - коэффициент, учитывающий механизм свойства материалов шестеренки и колесах [12], MПа.
Zε - коэффициент, учитывающий суммарную длину контактных линий [12, стр 166]
Zн – коэффициент, учитывающий форму сопряженных поверхностей зубьев [12, стр.167];
Кн – коэффициент нагрузки [6, стр.177];
bш – ширина зубчатого венца, м;
U – передаточное число;
[σн] – допускаемое контактное напряжение [6, стр.185], МПа
[σн]=  , (3.17)
, (3.17)
где √Кн – множитель, характеризующий увеличение номинальных напряжений;
σнlim – предел контактной выносливости [6, стр.185], МПа;
Sн – коэффициент запаса прочности;
ZR – коэффициент, учитывающий шероховатость сопряженных поверхностей;
ZV – коэффициент, учитывающий влияние скорости [6, стр.185]
 [σн]=
[σн]=  МПа
МПа
σн= 
Условие контактной прочности зубьев выполнено.
Зубья передачи также проверяются на изгибную прочность по формуле
σF=  [σF] , (3.18)
[σF] , (3.18)
где КF – коэффициент нагрузки;
YFS – коэффициент формы зубьев;
М – модуль зубьев
[σF]=  , (3.19)
, (3.19)
где σFlim – предел выносливости при работе зубьев одной стороной [13, табл.109, стр.187];
YR – коэффициент, учитывающий шероховатость переходной
поверхности [13, стр.186];
Yx – коэффициент размеров;
Yb – коэффициент, учитывающий чувствительность материалов к концентрации напряжений [13, стр.188];
SF – коэффициент запаса прочности
[σF]= 
σF= 
Условие прочности выполняется.
4.3.4 Расчет подшипника скольжения колеса тележки
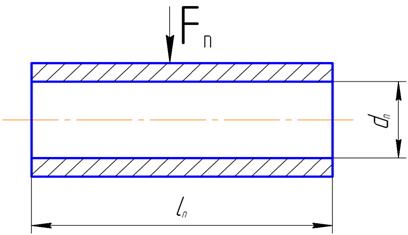
Рисунок 4.3Схема расчета подшипников колеса тележки.
Для определения давления, испытываемого подшипника, используются рисунок 3.3 и формула
Р=  , (3.20)
, (3.20)
где dn – внутренний диаметр подшипника, м;
ln – длина подшипника, м;
Fn – сила, действующая на подшипник, определяется по формуле
Fn=  , (3.21)
, (3.21)
Суммарная сила, действующая на передние ролики платформы, находим по формуле
FΣ=  , (3.22)
, (3.22)
где mnл – масса платформы, кг;
FΣ= 
Тогда
Fn= 
Известные значения подставляются в формулу (3.20) получим
Р=676/0,024∙0,09=0,313 МПа
Полученное значение Р сравнивается с допускаемым [Р]
Р ≤ [Р] (3.23)
0,113 ≤ 1 МПа
Удельные давления на подшипниках колеса тележки в пределах нормы.
Дата добавления: 2018-02-18; просмотров: 1747; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!