Прямое и косвенное описание процессов; некоторые модели источников сообщений; модели речевого сообщения; модели стохастического дискретного источника
Способы представления как случайных так и детерминированных процессов можно разделить на прямые и косвенные. К прямым способам описания относится аналитическое представление реализаций процесса временными функциями на основе функциональной связи значений сигнала в данный момент с его значениями в прошлом. То же относится к различным функциональным преобразованиям, отображаемым алгебраическими, разностными, интегро-дифференциальными уравнениями, в которых функциями времени являются детерминированные или случайные процессы. Так, задача исследования переходного процесса в линейной стационарной системе классическим методом с использованием дифференциального уравнения системы является типичной для прямого способа описания сигналов. Спектральное описание колебаний — характерный пример косвенного описания. К косвенным способам описания процесса можно отнести такие параметры сигналов, как эквивалентная ширина спектра, эквивалентная длительность. При описании случайных процессов в предыдущих параграфах мы пользовались косвенными характеристиками случайного процесса: интегральной функцией распределения, плотностью вероятностей, моментами первого и второго порядка, дисперсией, функцией корреляции, интервалом корреляции и другими усредненными статистическими характеристиками. При косвенных способах описания вероятностные закономерности отражают устойчивость средних результатов. Косвенное описание СП находит основное применение в задачах анализа.
|
|
|
В задачах синтеза СП прямой способ сводится к определению алгоритма воспроизведения его реализаций по заданным вероятностным характеристикам (косвенному описанию). При этом СП можно представить на основе описания поведения динамической порождающей системы на вход которой воздействует белый шум N(t), а на выходе формируется процесс X(t) с требуемыми характеристиками. Иначе говоря, прямой способ задаёт алгоритм генерирования процесса, а косвенный — вероятностные характеристики процесса. Как прямые, так и косвенные способы описания случайных процессов широко применяются в задачах теории связи.
Модели речевого сообщения. Под речевым сообщением b(t) будем понимать электрическое колебание, наблюдаемое на выходе электроакустического преобразователя при действии на его входе акустической речевой волны. К преобразователю отнесем микрофон вместе с фильтром, формирующим спектр выходного колебания в заданной полосе частот, а также устройство регулировки уровня. b(t) является речевым сообщением (первичным сигналом) в непрерывном времени t, его спектр сосредоточен в определённой полосе частот, например, для стандартного телефонного канала 300...3400 Гц.
|
|
|
Смысловое содержание акустической речевой волны априорно неизвестно в общем случае одному смысловому содержанию в разных экспериментах могут соответствовать различные электрические колебания, отличающиеся временной структурой, длительностью, формой и т.д. Поэтому речевое сообщение следует рассматривать как случайный процесс, реализации которого наблюдаются на выходе формирующего источника — источника речевых сообщений (сигналов). Случайный процесс как совокупность случайных величин задаётся вероятностными характеристиками — функциями распределения вероятностей, плотности вероятностей, моментными характеристиками. Эти характеристики часто включаются в состав вероятностных моделей речевых сигналов.
На практике априорные сведения о речевом сигнале не всегда оказываются достаточно полными, чтобы можно было явно задать его вероятностную модель. Поэтому приходится описывать процесс статистическими характеристиками, которые определяются опытным путём. Оценки интегральных функций распределения вероятностей, плотности вероятностей, КФ, СПМ дают приближённое представление о речевом сигнале. Они получаются усреднением за сравнительно большой промежуток времени в предположении стационарности и эргодичности речевого сигнала и вследствие этого не дают полного представления о его мгновенных свойствах.
|
|
|
Экспериментальные данные показывают, что если исключить паузы длительностью свыше 350 мс, то одномерная плотность речевого сигнала хорошо аппроксимируется двусторонним гамма-распределением

где а — среднеквадратическое значение;  – гамма-функция, а > 0 — параметр, зависящий от качества (главным образом, полосы пропускания) абонентского тракта, в основном от качества микрофона — для высококачественного микрофона а = 0,5 и более. При
– гамма-функция, а > 0 — параметр, зависящий от качества (главным образом, полосы пропускания) абонентского тракта, в основном от качества микрофона — для высококачественного микрофона а = 0,5 и более. При
а =1 переходит в распределение Лапласа (экспоненциальное распределение)

Распределение сигнала речи в паузах с учётом шумовых напряжений аппроксимируется гауссовским распределением

где 0 < а < 1 – параметр, характеризующий поведение функции плотности вероятности (при
а -> 0 он стремится к δ-функции). Распределение речевого сигнала в целом может аппроксимироваться взвешенной суммой распределенийс учётом вероятности появления пауз речи.
|
|
|

Рисунок 12 – Спектральная плотность мощности (а) и нормированная корреляционная функция (б) речевого сигнала
На рисунке 12, а показана экспериментальная зависимость нормированной спектральной плотности мощности речевого сигнала

где П2(f) – спектральная плотность среднего квадрата звукового давления речи, П0=20 Па – порог слышимости (минимальное звуковое давление, которое начинает ощущаться человеком с нормальным слухом на частотах 600…800 Гц). На рисунке 12, б дана зависимость коэффициента корреляции речи  соответствующая СПМ на рисунке 12, а.
соответствующая СПМ на рисунке 12, а.

Рисунок 13 – Вариант порождающей системы (фильтра) для речевого сигнала (а) и график СПМ на положительных частотах процесса на выходе порождающего фильтра (б)
В последние годы всё большее распространение находят модели речевых сигналов в виде динамических порождающих систем. Например выбирая в качестве динамической системы последовательно соединенные RC-фильтры нижних и верхних частот (рисунок 13,а), получают описание речевого сигнала двухкомпонентным марковским процессом. В этом случае СП представляется системой стохастических уравнений состояния.
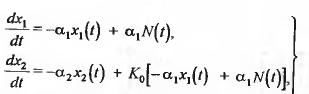
где x1(t) и x2(t)=b(t) – соответсвенно напряжение на емкости С1 и на нагрузке R2, K0 – коэффициент передачи устройства развязки; N(t) обладает свойством (2); 
 - постоянные коэффициенты. СПМ и ФК случайного процесса B(t); определяемые на основе (10) будут:
- постоянные коэффициенты. СПМ и ФК случайного процесса B(t); определяемые на основе (10) будут:


Модель стохастического дискретного источника. В качестве модели многих двоичных источников сообщений (например, данных на выходе ЭВМ) можно использовать модель случайного стационарного синхронного двоичного сигнала XKB(t). Будем полагать, что процесс Xm(t) с вероятностью 0,5 принимает в дискретных точках, кратных 7, значения ±h (сохраняя эти значения на интервале Т) независимо от значений процесса на предыдущих тактовых интервалах. Очевидно, что

Зафиксируем момент t0. Интервал  , отделяющий точку t0 от ближайшей точки, в которой может произойти изменение знака процесса
, отделяющий точку t0 от ближайшей точки, в которой может произойти изменение знака процесса  , распределён в нашей модели равномерно на отрезке [0, 7]:
, распределён в нашей модели равномерно на отрезке [0, 7]:

Возьмём сечение процесса XДB(t) в моменты t0 и t0 +τ (τ>0). Если τ < Δ, то усредненное значение произведения рассматриваемых сечений равно h2, если т >Δ, оно равно 0,25(h2 - h2) = 0 (произведение (-h)h получается, если знаки посылок в отдельных сечениях не совпадают, h2 — если знаки этих посылок совпадают. Поэтому ФК процесса XДВ(t)

Ввиду чётности ФК по аргументу τ окончательно запишем выражение для ФК:

Взяв прямое преобразование Фурье, получаем СПМ для процесса XДВ(t):


Рисунок 14 – ФК (а) и СПМ (б) случайного процесса

Рисунок 15 – Две реализации случайного синхронного двоичного стационарного сигнала
Дата добавления: 2018-02-15; просмотров: 1003; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!