Бипедализм: как обезьяны могли стать двуногими
Как наши далекие предки преодолели эволюционный разрыв между хождением на четырех и на двух ногах? Проблема в том, что животное, остановившееся в своем развитии на полпути между четвероногой и двуногой обезьяной, возможно, было уязвимее как своих четвероногих предков, так и своих двуногих потомков. Вероятно, этот переход мог осуществиться только в период, когда хищники не представляли существенной опасности.
То, что вы прочитаете далее, разумеется, не является реальными, засвидетельствованными фактами. Возможно, существует множество причин тому, что такой ход развития не мог иметь место. Однако мое изложение иллюстрирует, как теория периферийного видообразования могла бы объяснить одну из проблем нашего эволюционного происхождения.
Один из островов у побережья Восточной Африки мог некогда быть соединенным с континентом песчаной отмелью. Возможно, в то время на него перебралось небольшое количество шимпанзеобразных обезьян. Случилось так, что за ними не последовали крупные хищники. После этого произошел шторм или извержение вулкана, и остров вновь оказался отрезанным от суши
Основной пищей на острове являлись моллюски, которые можно было найти на берегу. Популяция обезьян увеличивалась, и становилось трудно найти моллюсков где-либо, кроме как на камнях под водой на некотором расстоянии от берега. За несколько миллионов лет обезьяны эволюционировали. Они проводили много времени, стоя на задних ногах на значительной глубине, собирая моллюсков.
|
|
|
Не всегда ситуация на острове была мирной. Действительно, крупных хищников не было, но в результате этого популяция обезьян стала расти, и запасов еды перестало хватать. Началась жесткая конкуренция за территорию, главным образом - за места залежей моллюсков. Население разделилось на мелкие конкурирующие группы. В каждой из этих групп самки и молодые особи занимались собирательством пищи под охраной самцов, отгонявших самок и детей конкурирующей группы. Самец, стоящий на скале с запасом булыжников, мог эффективнее охранять своих соплеменников, чем когда он сражался в воде. Таким образом, движение руки стало более специализированным - приспособленным для эффективного и точного броска.
На суше группы самцов также сражались за территорию. Общий генофонд обусловливал тот факт, что все они были на одинаковой ступени развития двуногого прямохождения. Но постепенно выделились те из них, кто предпочитал сражаться с помощью палок и камней, побеждая тех, кто по-прежнему ходил на четвереньках и использовал клыки.
Таким образом, когда остров вновь соединился с Африкой, и популяция обезьян столкнулась с континентальными хищниками, у нее уже были выработаны новые способы борьбы с этими хищниками.
|
|
|
Мы называем этих новых обезьян австралопитеками.
=
http://evolution-of-man.info/austrorus.htm
Австралопитеки
Около 4 миллионов лет назад, или несколько ранее, появилась группа прямоходящих обезьян, которых современная наука именует австралопитеками. Несмотря на то, что австралопитеки были двуногими, их мозг был не больше, чем у шимпанзе. Эти животные достигли весьма больших успехов на пути эволюции. Они жили в экваториальной Африке в течение по меньшей мере двух миллионов лет. Эпоха австралопитеков длилась примерно столько же, сколько эпоха их наследников рода Homo, из которого впоследствии вышел и наш вид.
За время своего существования австралопитеки разделились на ряд видов. Этот род оставил достаточно большое количество ископаемых свидетельств своего существования в этот период, в то время как останков шимпанзе и горилл, относящихся к этому периоду, до сих пор не найдено.
Чем объяснялся успех австралопитеков? Они не умели так же хорошо карабкаться по деревьям, как их предки - приматы и обезьяны. Они не умели так же быстро бегать, как львы и леопарды, которые, вероятно, охотились на них и их потомство. Они утратили острые, как кинжал, клыки, которые являются основными средствами обороны приматов и обезьян. В то же время, в отличие от последующих видов гоминидов, мозг австралопитеков не превышал размеров мозга шимпанзе, и они не умели изготовлять оружия из кремня и разжигать огонь.
|
|
|
Почему австралопитеки приобрели прямую осанку? Природа дает ключ к пониманию этого. С прямохождением как-то связан тот факт, что двуногие австралопитеки постепенно утратили острые и длинные клыки. У более ранних видов ископаемых животных мы еще находим достаточно длинные клыки, хотя и значительно менее опасные, чем клыки шимпанзе. Но у более поздних останков мы обнаруживаем такие же по размеру клыки, как у современного человека, который использует их как орган жевания, а не оружие.
Ниже представлен рисунок из Reconstructing Human Origins Гленна Конроя, на котором слева мы видим ископаемые зубы ранней человекообразной обезьяны Proconsul , в центре - зубы Australopithecus afarensis (около 3 млн. лет), справа - зубы Australopithecus africanus (около 2,6 млн. лет).
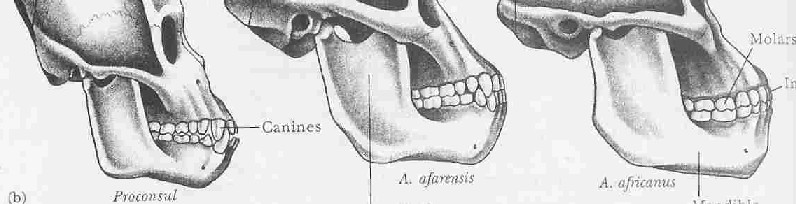
Клыки являются существенным элементом экипировки обезьян. Не имея ни рогов, ни когтей, ни копыт, приматы используют свои грозные клыки в качестве мощного оружия в борьбе против хищников и соперников внутри своего племени, а иногда для охоты на других животных. Если прямохождение обусловило то, что австралопитеки утратили это оружие, значит, взамен оно обеспечило их другими способами защиты.
|
|
|
Как сражаются шимпанзе? Майкл Лич, проницательный и опытный исследователь жизни в дикой природе, описывает сражение двух соперничающих групп шимпанзе так.
..может начаться кровавое побоище. Если одна группа имеет значительный численный перевес, шимпанзе сражаются маленькими группами; двое или трое животных сдерживают натиск врага, в то время как остальные кусают его и наносят ему удары... У шимпанзе острые и длинные клыки и коренные зубы, способные разрывать плоть, поэтому они могут нанести противнику ужасные раны. Шимпанзе быстро передвигаются, сильны и крайне агрессивны. При нападении на врага - представителя любого вида - они используют длинные ветки, орудуя ими, как дубинами, а также швыряют в животное камни, рассчитанные на его вес. Опытные самцы специально выбирают крупные камни, игнорируя камни мелких размеров... Таким же оружием они обороняются от любого хищника, который подходит на опасно близкое расстояние.
( Michael Leach The Great Apes )
Другие источники также подтверждают, что шимпанзе часто практикуют бросание палок и камней, хотя и не проявляют при этом особого умения и сноровки (смотрите Youtube).
Шимпанзе действительно умеют бросать камни, но их тело не слишком хорошо приспособлено для такого способа ведения боя. Их передние конечности являются органами общего назначения, приспособленными, прежде всего, для передвижения, особенно когда животному требуется двигаться быстро и проворно. В таких случаях шимпанзе едва ли может использовать передние конечности в других целях.
Если обычное четвероногое животное, сражаясь на задних лапах, действует медленно и может потерять равновесие, то австралопитеки - близкие родственники шимпанзе - полностью адаптировались к двуногому прямохождению и передвигались на ногах так же быстро, как и современный человек.
Поскольку для передвижения австралопитекам руки были не нужны, они могли позволить себе специализироваться на сугубо ручных манипуляциях - метании и нанесении ударов оружием, а также использовании орудий из природных материалов. Эти животные стали лучше метать камни, приспособились к тому, чтобы носить с собой несколько камней и научились более эффективно сражаться на близком расстоянии, используя палки. Будучи двуногими существами, способными большую часть времени держать врагов на безопасном расстоянии с помощью камней и дубин, австралопитеки все меньше нуждались в использовании зубов в качестве оружия. Клыки, приспособленные для еды, вероятно, приносили им больше пользы. C изменением функции клыков, изменились их форма и размер
Идея тесной связи между двуногостью и утратой клыков была предложена задолго до того, как были обнаружены первые останки австралопитеков. Автором этой идеи был никто иной, как Чарльз Дарвин:
Свободное использование рук и кистей, являвшееся отчасти причиной, а отчасти результатом прямохождения, по-видимому, косвенным образом повлияло на другие модификации структуры тела. Ранние предки человека мужского пола, как указывалось выше, вероятно, были оснащены крупными клыками. Но по мере того, как они приобретали навыки использования камней, дубин и другого оружия для сражения с врагами и соперниками, они все реже прибегали к использованию своих челюстей.
( Darwin : The Descent of Man )
Тем не менее, ученые обошли вниманием важность метания камней и использования других природных объектов в качестве оружия. Как пишет Барбара Айзек в своем блестящем труде, которому уже около двадцати лет (см. ссылку):
Способность к метанию, которая была, вероятно, выработана на ранней стадии человеческой эволюции, не получила достаточного внимания со стороны ученых. Хотя у обезьян эта способность развита слабо, анатомические исследования выявляют, что рука Australopithecus afarensis была приспособлена к точному и сильному броску.
В этой работе также отмечается:
Группа протогоминидов, вооруженная камнями весом по 200г, представляла собой грозных противников для хищников . Ведь хищники стремятся избегать ран и увечий, которые могут привести к потере дееспособности и, в конечном счете, голодной смерти... Камни обычно использовались гоминидами в целях самообороны, иногда - в целях нападения, а впоследствии они стали орудием охоты.
Доказательств того, что австралопитеки изготовляли каменное оружие, не существует, хотя, подобно шимпанзе, они наверняка умели изготовлять простые орудия труда из непрочных материалов (см.ссылку). Первые каменные артефакты появились лишь на следующей ступени эволюционного развития - в эпоху Homo. Но способность к метанию камней и ношение с собой запаса амуниции из натуральных материалов, вероятно, давало нашим далеким предкам - австралопитекам - преимущество, которого не имели другие виды животных. Это преимущество состояло в способности наносить удары на расстоянии, оставаясь при этом недосягаемыми для животных, вооруженных зубами, рогами, копытами и когтями.
Долгая борьба за выживание и господство человека над другими видами началась тогда, когда наши двуногие предки обрели прямохождение - научились ходить, бегать и сражаться на двух ногах. Это давало им возможность использовать свои передние конечности для того, чтобы держать оружие и бросать камни и таким образом убивать и ранить врагов, находясь на безопасном расстоянии от их клыков и когтей. Благодаря этому они и выжили.
=
https://ru.wikipedia.org/wiki/Неандерталец
https://ru.wikipedia.org/wiki/Люди_(род)
=
https://ru.wikipedia.org/wiki/Бипедализм
Бипедализм
[править | править вики-текст]
Материал из Википедии — свободной энциклопедии
Бипедали́зм (также бипедальность или двуногость) — способ локомоции (передвижения) по твёрдой поверхности при помощи двух парных конечностей (ног). Характерен, в первую очередь, для птиц, сумчатых млекопитающих и человека. Также был характерен для динозавров подотряда тероподов. Животные, передвигающиеся на двух конечностях, называются бипедами.
Содержание
[скрыть]
· 1В природе
o 1.1Пресмыкающиеся
o 1.2Птицы
o 1.3Млекопитающие
· 2В технике
· 3Примечания
· 4Ссылки
В природе[править | править вики-текст]
В природе бипедализм неоднократно возникал в ходе эволюции независимо у различных групп наземных хордовых животных. Различают факультативный (используемый животным лишь время от времени, как, например, у утконосых динозавров) и облигатный (постоянный, как у страуса или человека) бипедализм.
Пресмыкающиеся[править | править вики-текст]
У пресмыкающихся бипедализм впервые возник в среднетриасовом периоде у древних архозавров группы Ornithodira и получил дальнейшее развитие у динозавроморфов.
Протерозух, примитивный текодонт с «растопыренными» конечностями.
Примитивные группы древних амниот изначально передвигались на четырёх широко расставленных в стороны конечностях, которые при локомоции раздвигались медиалатерально и не были способны постоянно поддерживать туловище над землёй (отсюда — «пресмыкание»), что соответствовало характерному для них низкому уровню интенсивности обмена веществ и сравнительно малоподвижному образу жизни. Современные пресмыкающиеся в основном сохраняют подобный (примитивный в эволюционном плане) характер локомоции, однако у некоторых продвинутых групп древних рептилий её развитие пошло в ином направлении — их конечности стали перемещаться непосредственно под туловище, занимая более габитуально вертикальное (выпрямленное) положение, что соответствовало более подвижному образу жизни, связанному с бегом и активным преследованием добычи (из современных рептилий только у крокодилов конечности могут занимать положение под туловищем, причём исключительно при беге).
У зверозубых рептилий цинодонтов (предков млекопитающих) при этом хвост значительно уменьшается в размерах и перестаёт играть какую либо роль в локомоции (впоследствии у некоторых форм мог вторично появляться длинный хвост, однако он уже скорее напоминал крысиный и не имел мощной мускулатуры, характерной для хвоста других рептилий), позвоночник приобретает способность к вертикальному изгибу во время бега на четырёх ногах (при одновременном уменьшении способности к поперечному изгибу), лобковая и седалищная кости уменьшаются в размерах, а подвздошная — увеличивается, обеспечивая надёжную опору для сильных мышц конечностей. Эта группа рептилий стала специализироваться к бегу на четырёх ногах, аналогично современным хищным млекопитающим, и достигла большого эволюционного успеха на протяжении пермского периода, но по какой-то причине практически сошла со сцены в мезозое — все известные мезозойские формы зверозубых рептилий и млекопитающих имеют очень мелкие размеры.
Орнитозух, текодонт с предположительно бипедальной локомоцией.
У текодонтов, напротив, лобковая и седалищная кости начали удлиняться, передние ноги — укорачиваться, а тяжёлый длинный хвост, практически лишившийся подвижности из-за срастания тазовых костей, превратился в балансир, уравновешивающий массу вытянутого туловища. Задние конечности при ходьбе стали перемещаться в парасагиттальной плоскости, голеностопный сустав получил возможность пружинить при ходьбе, что способствовало более экономному расходу сил, а опора переместилась на средний (третий) палец. Это позволило многим группам текодонтов перейти к факультативной, или даже габитуальной, бипедальности, подобно современным бегающим птицам, специализировавшись на беге на двух ногах.
В обеих группах данные изменения должны были сопровождаться значительным повышением интенсивности обмена веществ, поскольку постоянное поддержание тела над землёй и длительная локомоторная активность требовали намного больших энергозатрат по сравнению с «пресмыканием». Однако проследить подобные изменения на палеонтологическом материале сложно. Достоверно известно, однако, что потомки данных групп рептилий — соответственно млекопитающие и птицы — имеют интенсивный обмен веществ и эндотермную систему терморегуляции (теплокровность).
Непосредственные потомки текодонтов — ранние динозавры, как ящеротазовые, так и птицетазовые — были активными хищниками, как минимум часть времени передвигавшимися на задних конечностях, что способствовало их быстрому прогрессу, особенно после вымирания большинства зверозубых рептилий на рубеже пермского и триасового периода. В юрском периоде почти все более-менее крупные наземные животные (свыше метра в длину) были динозаврами.
Постепенно часть динозавров переходит на растительную пищу, занимая освободившиеся экологические ниши. Большинство растительноядных видов вновь возвращается к передвижению на четырёх конечностях, эволюция же хищников продолжает идти по «двуногому» пути (у тираннозавра и тарбозавра передние конечности оказались практически редуцированны, а у манирапторов — напротив, развились в специализированную хватательную форму). В течение 140 млн лет, вплоть до конца мелового периода, основными наземными хищными позвоночными были бипедальные динозавры.
Бипедальными динозаврами были предки птиц (однако приспособление современных нелетающих птиц вроде страуса к похожему образу жизни является вторичным, их предки были летающими). Факультативный бипедализм предполагается и для некоторых сравнительно поздних видов крокодилов.
Среди современных рептилий бипедализм редок (если не рассматривать птиц как часть этой группы). В качестве примера рептилии с (факультативно) бипедальной локомоцией можно привести плащеносную ящерицу. В отличие от древних двуногих рептилий, у неё сохраняется «растопыренное» расположение конечностей, так что бег на задних ногах в её исполнении выглядит несколько неуклюже.
Птицы[править | править вики-текст]
Птицы произошли от хищных ящеротазовых динозавров. Бипедализм — изначальная черта птиц, покрытые перьями передние конечности которых превратились в крылья, а вся остальная анатомия адаптировалась к полёту.
Впоследствии часть птиц вновь вернулась к полностью наземному образу жизни, утратив способность летать, и утратила киль и их крылья утратили летательную функцию. Эти группа птиц известна как бескилевые птицы. У многих видов нелетающих птиц развилась способность к быстрому бегу. Так взрослый африканский страус способен развивать скорость до 70 км/ч.
Ещё одна группа птиц — пингвины, также утратила способность к полёту. Крылья этих птиц, ставших полуводными животными, трансформировались в ласты. Передвигаются по твёрдой поверхности они также на двух задних конечностях. При этом позвоночник пингвинов располагается практически вертикально.
Млекопитающие[править | править вики-текст]
См. также: Изменения скелета человека в результате перехода к прямохождению
Наибольшее распространение бипедализм получил среди сумчатых млекопитающих (кенгуру, кенгуровые крысы и др.). Судя по некоторым сообщениям очевидцев, недавно вымерший тилацин мог вставать на задние лапы во время преследования добычи, переходя с галопа на прыжки, подобно кенгуру.
Среди плацентарных млекопитающих бипедализм редок и является скорее исключением. Видимо, причиной этого является отсутствие у млекопитающих тяжёлого мясистого хвоста, способного служить при ходьбе на двух ногах в качестве балансира (утраченного ещё их давними предками, зверозубыми рептилиями, в ходе адаптации к бегу на четырёх ногах). Из-за этого большинство бипедальных млекопитающих перемещаются не бегом, а прыжками на задних лапах. Переход предков человека к облигатной бипедальности и быстрому бегу на двух ногах потребовал значительных изменений их анатомии.
В качестве примеров можно привести лептиктидий, тушканчиковых, некоторых неполнозубых и человека. Многие обезьяны в норме передвигаются на четырёх ногах, однако могут ходить и на двух, в неволе иногда даже переходя к облигатному бипедализму. Например, бонобо используют бипедальную локомоцию при переноске детёнышей или предметов, изредка для добычи пищи. Вставать на задние лапы могут, к примеру, медведи, однако в природе пользуются этим редко.
Переход предков человека к хождению на двух задних конечностях способствовал развитию передних конечностей (рук), с помощью которых было удобно пользоваться примитивными орудиями труда, переносить пищу из одного места в другое. Развитие ручного труда в свою очередь способствовало развитию головного мозга. Вместе с тем, переход гоминид к бипедальности имел и негативный побочный эффект[источник не указан 1507 дней] — человек стал фактически единственным млекопитающим, детёныши которого рождаются с не до конца сформированными черепной коробкой и головным мозгом. На самом деле именно «недоразвитый» в момент рождения мозг ребёнка позволяет ему освоить такой объём информации, который позволяет адаптироваться к жизни в сложном человеческом обществе, включая использование членораздельной речи, абстрактного мышления и сложных орудий труда (техники). Если бы человек рождался с более полно сформированным мозгом, как у детёныша обезьяны, он «пропустил» бы в утробе матери много времени, в норме уходящего на обучение, и со временем серьёзно отстал бы от «нормальных» детей в умственном развитии, в частности — скорее всего, не смог бы научиться говорить, как «дети-маугли».
В технике[править | править вики-текст]
Ввиду технических сложностей исполнения, механизмы, использующие бипедальный способ локомоции, пока не получили большого распространения. Из используемых на практике механизмов можно назвать шагающие экскаваторы. Также существуют проекты роботов, передвигающихся на двух ногах. Примерами роботов-шагоходов такого типа могут служить ASIMO[1], TOPIO[2] и другие.
Примечания[править | править вики-текст]
1. ↑ Статья о роботе ASIMO на сайте «Популярная механика»
2. ↑ Официальный сайт TOPIO, раздел «HISTORY», англ.
Ссылки[править | править вики-текст]
· Иорданский Н. Н. ГЛАВА 3. МЕЗОЗОЙСКАЯ ЭРА - ВЕК РЕПТИЛИЙ // Эволюция жизни. — М.: Академия, 2001. — 425 с.
· Гилёв А. Н. Латерализация моторных функций конечностей у сумчатых ( Marsupialia ). — С.-Пб.: Санкт - Петербургский Государственный университет., 2010. — 103 с.
· Журавлёв А. Ю. До и после динозавров. — М.: Вече, 2006. — 352 с. — (Великие тайны). — ISBN 5-9533-1258-X.
=
https://ru.wikipedia.org/wiki/Ходьба_человека
Ходьба человека
[править | править вики-текст]
Материал из Википедии — свободной энциклопедии
Сюда перенаправляется запрос « Прямохождение ». На эту тему нужна отдельная статья .
Ходьба человека — наиболее естественная локомоция человека.
1. Автоматизированный двигательный акт, осуществляющийся в результате сложной координированной деятельности скелетных мышц туловища и конечностей[1].
2. Разновидность двуногого передвижения, при котором опора на одну ногу циклично сменяется двуопорным периодом, а затем опорой на другую ногу. При ходьбе контакт с опорой не теряется, в отличие от бега, при котором двуопорные периоды заменяются отрывом от опоры обеих ног — периодом полета[источник не указан 211 дней].
3. Самый доступный вид физической нагрузки[2].
Содержание
[скрыть]
· 1Другие определения
· 2Виды ходьбы
· 3Задачи ходьбы
· 4Параметры ходьбы
· 5Биомеханика ходьбы
o 5.1Временна́я структура ходьбы
o 5.2Кинематика ходьбы
o 5.3Динамика ходьбы
§ 5.3.1Сила реакции опоры
o 5.4Иннервационная структура ходьбы
· 6Основные биомеханические фазы
· 7Эффективность ходьбы
· 8Интересные факты
· 9См. также
· 10Примечания
· 11Ссылки
Другие определения[править | править вики-текст]
Существуют и другие определения, характеризующие эту локомоцию:
· Череда рефлекторно контролируемых падений. Ходьбу образно описывают как «управляемое падение». При каждом шаге человек наклоняется вперед и начинает падение, которому препятствует выдвинутая вперёд нога. После того как она касается земли, на неё переносится вес тела, колено подгибается, амортизируя падение, и выпрямляется, возвращая тело на исходную высоту[источник не указан 211 дней].
· Ходьбу рассматривают с позиции модели прямого и обратного маятника, рассматривая сегменты конечностей и тело как систему физических маятников[источник не указан 211 дней].

Ходьба с позиции физического маятника
· По образному выражению Бернштейна, который объединил биомеханику и нейрофизиологию двигательного аппарата в единую науку физиологию движений, ходьба это:
· «…синергии, охватыващие всю мускулатуру и весь двигательный аппарат сверху донизу»[3];
· «…циклический акт, то есть движение, в котором периодически повторяются вновь и вновь одни и те же фазы»[4].
· Ходьба — это двигательное действие, результат реализации двигательного стереотипа, комплекса безусловных и условных рефлексов[источник не указан 211 дней].
· Ходьба — это двигательный навык, который представляет собой цепь последовательно закреплённых условно рефлекторных двигательных действий, которые выполняются автоматически без участия сознания[источник не указан 211 дней].
· Создатель аэробики Кеннет Купер[en] называл ходьбу разновидностью аэробной нагрузки, формой оздоровительной тренировки[источник не указан 211 дней].
=
https://ru.wikipedia.org/wiki/Локомоция
Локомоция
[править | править вики-текст]
Материал из Википедии — свободной энциклопедии
Локомо́ция (фр. locomotion «передвижение» от лат. locō mōtiō «движение с места») — перемещение животных (в том числе человека) в пространстве (в водной среде, воздушной среде, по твердой поверхности, в плотной среде), обусловленное их активными действиями. Локомоция играет важную роль в жизни животных: в отличие от большинства растений, они могут передвигаться для поиска пищи или для спасения от хищников[1][2].
В физиологии человека локомоция — вид двигательной деятельности, связанный с активным перемещением в пространстве[3]. Её результаты — двигательные акты.
Наряду с манипулированием, локомоция — одна из двух категорий поведения. Локомоция относится к инстинктивным движениям (является функцией ригидной опорно-двигательной системы организма, допускающей лишь минимальную индивидуальную изменчивость движений). Локомоторное решение задач (выбор верного пути в лабиринте при проведении эксперимента и т. д.) может привести к формированию сложных навыков, стать элементом интеллектуальных действий животных[4].
Содержание
[скрыть]
· 1Эволюция
· 2Виды (формы, способы) локомоции
o 2.1Наземная локомоция
§ 2.1.1Симметричная локомоция
§ 2.1.2Асимметричная локомоция
· 3Примечания
· 4Литература
· 5Ссылки
Эволюция[править | править вики-текст]
Эволюция животных (совершенствование двигательного аппарата, органов чувств, центральной нервной системы) определяла способы (типы) локомоции, меняя их от простейшего амёбоидного движения некоторых одноклеточных до сложных локомоторных актов[3].
Преимущественно у низших животных локомоция осуществляется путём сокращения мускулатуры (или её аналогов) при помощи органов передвижения (специальных эффекторов) — ресничек, жгутиков, щупалец, плавников, ног, крыльев, органов реактивного движения и др.)[4].
Наиболее сложная локомоция — у позвоночных (пример взаимосвязи формы и функции в эволюции): плавание, полёт, планирование, лазание, прыгание, брахиация (или качание на руках), хождение и бег на 4-х или 2-х конечностях. Различные аллюры , или походки (шаг, рысь, иноходь, четырёхногий или двуногий рикошет, галоп), в отличие от способов локомоции, определяются не строением двигательного аппарата, а различиями в координации работы конечностей. Исключительно важную роль сыграло изменение локомоции в эволюции человека. Лазание предков человека по деревьям способствовало формированию хватательных органов — рук, переход к прямохождению освободил их для использования в качестве органов труда.
Плавание путём изгибания тела в горизонтальной плоскости (перемещение в водном пространстве) — исходный способ локомоции позвоночных.
После выхода животных на сушу главным органом локомоции стали конечности.
Основа локомоции наземных позвоночных — хождение, а при скоростной локомоции — бег на 4-х или, реже, 2-х конечностях.
Первым наземным позвоночным присуща симметричная локомоция: шаги, когда все лапы работают поочерёдно с равными интервалами.
Потребность в более быстрой локомоции при несовершенстве самого аппарата движения привела к изменению ритма: интервал в работе диагональных конечностей уменьшился, а односторонних увеличился — появились рысеобразный шаг, а затем и рысь с её в унисон работающими диагональными конечностями. Лишь при коренном усовершенствовании двигательного аппарата (это совпало с появлением млекопитающих) развились иноходь, при которой в унисон работают конечности одной стороны, и асимметричная локомоция, более эффективная и скоростная, чем симметричная. Так возник четвероногий рикошет; от него произошёл галоп — наиболее прогрессивная локомоция, характерная для млекопитающих.
Виды (формы, способы) локомоции[править | править вики-текст]
К локомоции относятся[3]:
· плавание
· летание[5] (полёт)
· планирование
· лазание
· бурение почвы
· брахиация (качание на руках)
Наземная локомоция[править | править вики-текст]
· хождение (ходьба), см. также аллюр, походка
· бегание (бег) на 4-х или 2-х конечностях
· прыгание (прыжки в высоту)
Различают 2 главных типа наземной локомоции
Симметричная локомоция[править | править вики-текст]
· Поочерёдная работа конечностей: за передней лапой всегда следует диагональная от неё задняя, редко наоборот
· Попарная работа конечностей: в каждой паре одна передняя и одна задняя конечность
Асимметричная локомоция[править | править вики-текст]
За поочерёдной или синхронной работой передних лап в движение включаются задние.
Примечания[править | править вики-текст]

| локомоция в Викисловаре |

| Локомоция на Викискладе |
1. ↑ Локомоция // Энциклопедический словарь Брокгауза и Ефрона : в 86 т. (82 т. и 4 доп.). — СПб., 1890—1907.
2. ↑ Локомоция — статья из Большой советской энциклопедии.
3. ↑ Перейти к:123 Значение слова «Локомоция» в Большой советской энциклопедии
4. ↑ Перейти к:12 Психологический словарь: Локомоцмя
5. ↑ Локомоция
Литература[править | править вики-текст]
· Бернштейн Н. А., Очерки по физиологии движений и физиологии активности, М., 1966
· Суханов В. Б., Общая система симметричной локомоции наземных позвоночных и особенности передвижения низших тетрапод, М., 1966
· Гамбарян П. П., Бег млекопитающих. Приспособительные особенности органов движения, Локомоция, 1972
· Гранит P., Основы регуляции движений, пер. с англ., М., 1973
· HoweII А. В., Speed in animals, Chi., 1944; Gray J., Animal locomotion, L., 1968.
=
https://ru.wikipedia.org/wiki/Ходьба
Ходьба
[править | править вики-текст]
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 19 апреля 2014; проверки требуют 9 правок.
Сюда перенаправляется запрос Хождение. О жанре русской средневековой литературы см. Хождения.
Идущий мужчина.
Ходьба — один из способов локомоции человека и животных; осуществляется в результате сложной координированной деятельности скелетных мышц и конечностей.
Содержание
[скрыть]
· 1Общие представления
· 2Виды ходьбы
· 3Близкие по значению слова
· 4См. также
· 5Примечания
Общие представления[править | править вики-текст]
· Ходьба является видом локомоции человека и животных (кошки, лошади, собаки).
· Я. И. Перельман в книге "Занимательная физика", том 1 описывает ходьбу как «Последовательность управляемых падений». При каждом шаге человек наклоняется вперед и начинает падение, которому препятствует выдвинутая вперёд нога. После того как она касается земли, на неё переносится вес тела, колено подгибается, амортизируя падение, и выпрямляется, возвращая тело на исходную высоту. Таким образом, человек ненадолго выводит себя из состояния равновесия, смещая вперед свой центр тяжести и затем, посредством вытянутой вперед ноги, возвращается в исходное положение.
Ходьба с позиции физического маятника
· Ходьбу рассматривают[кто?] с позиции модели прямого и обратного маятника, рассматривая сегменты конечностей и тело как систему физических маятников.
· По образному выражению Бернштейна, который объединил биомеханику и нейрофизиологию двигательного аппарата в единую науку — физиологию движений, — ходьба это:
· «…синергии, охватыващие всю мускулатуру и весь двигательный аппарат сверху донизу»[1];
· «…циклический акт, то есть движение, в котором периодически повторяются вновь и вновь одни и те же фазы»[2].
· Наряду со стоянием, ходьба — двигательное действие (акт), результат реализации двигательного стереотипа, комплекса безусловных и условных рефлексов.
· Двигательный навык, который представляет собой цепь последовательно закреплённых условно рефлекторных двигательных действий, которые выполняются автоматически без участия сознания.
· Автоматизированный двигательный акт, осуществляющийся в результате сложной координированной деятельности скелетных мышц туловища и конечностей[3].
Виды ходьбы[править | править вики-текст]
· Многоногая ходьба, рассматриваемая как совокупность элементов, свойственных двуногой ходьбе[4].
· Двуногая ходьба (бипедализм).
Идущий слон, анимация.
· Ходьба робота
· Ходьба животных
· Ходьба человека
· Ходьба нормальная
· Патологическая ходьба
· Ходьба на протезе
· Ходьба с опорой на трость (на две трости)
· Ходьба при нарушении подвижности в суставах
· Ходьба при утрате или нарушении функции мышц
· Ходьба на протезе нижней конечности (после ампутации на уровне голени, бедра, таза)
Близкие по значению слова[править | править вики-текст]
· Походка — особенности поз и движений при ходьбе, характерный для конкретного человека.
· Осанка — привычное положение тела человека в покое и движении, в том числе при ходьбе.
См. также[править | править вики-текст]

В Викисловаре есть статья « ходьба »

| Изображения:Физкультура |
· Ходьба человека
· Хождение босиком
· Спортивная ходьба
· Походка
· Стояние
· Механизм Кланна — кинематический механизм, моделирующий походку животных.
Примечания[править | править вики-текст]
1. ↑ Бернштейн Н. А. Очерки по физиологии движений и физиологии активности. — М., 1966.
2. ↑ Бернштейн Н. А. Исследования по биодинамике ходьбы, бега, прыжка. — М.: Физкультура и спорт, 1940.
3. ↑ Дубровский В. И., Федорова В. Н. Биомеханика. Учебник для ВУЗов. — М.: ВЛАДОС, 2003. — ISBN 5-305-00101-3. — С. 388.
4. ↑ Ходьба // Экслибрис — Яя. — М. : Советская энциклопедия, 1978. — (Большая советская энциклопедия : [в 30 т.] / гл. ред. А. М. Прохоров ; 1969—1978, т. 30).
=
http://www.popmech.ru/technologies/7179-blizhe-k-lyudyam-preved/
Ближе к людям: Превед?
Создавая робота ASIMO по принципу Technology+Humanity, инженеры Honda стремятся объединить технологическое совершенство с человечностью.
Сергей Апресов
25 ноября 2007
9756

Работу над двуногим роботом компания Honda начала еще в 1986 году с постройки прототипа Е0. Робот мог ходить только прямо по идеально ровной поверхности и к каждому шагу готовился более пяти секунд. На создание механического гуманоида, способного ходить как человек, ушло двадцать лет

ASIMO способен распознавать людей не только если они стоят прямо перед ним, но и в движении. Если робот видел вас раньше, он узнает вас в лицо, подойдет и поздоровается. Кроме того, ASIMO разбирается в жестах: ему можно помахать рукой в знак приветствия или указать направление движения

Запястья нового ASIMO получили по две новые оси свободы, а кисти — по одной. Благодаря этому руки робота превратились в точный инструмент, способный выполнять полезную работу. Дополнительный сустав в шее сделал гуманоида более эмоциональным, а поворотный торс позволил ему бегать
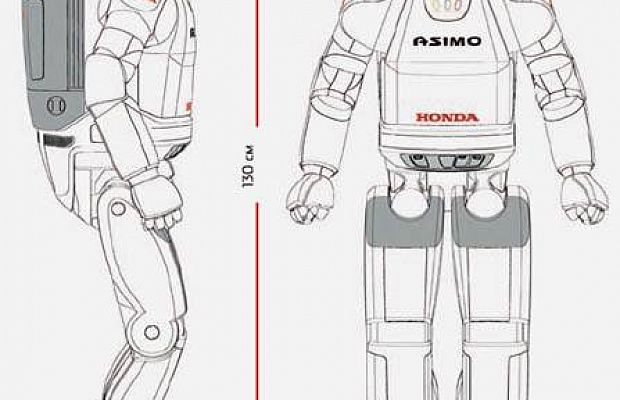
Рост ASIMO достаточен, чтобы доставать до столов и выключателей, катать тележки с напитками, брать вещи с относительно высоких полок, подниматься и спускаться по обычным лестницам

«Полный отрыв от поверхности доставил нам наибольшее количество проблем, — рассказывает главный конструктор ASIMO Шиничи Мацунага. — Мы научили робота контролировать положение центра масс, даже не касаясь ногами земли». Во время бега ASIMO отрывает от земли обе ноги одновременно. Его полет длится 0,08 секунды, примерно как у бегущего человека
Легко ли научить робота рукопожатию? «Велика забота, — воскликнет иной читатель, — если уж собака лапу подает, то робот и подавно справится: выставил руку вперед и жди, пока ее пожмут!» Да, пока что с роботами это работает — спрос с них невелик. Но рукопожатие ли это? Попробуйте сами поздороваться, выставив вперед неподвижную руку, — вряд ли вам ответят добром. Дальше все становится еще сложнее: протянете прямую руку — вас сочтут за невежу, подойдете слишком близко — посчитают агрессором, сожмете руку слабо — заподозрят в равнодушии, а стиснете изо всех сил — с вами вообще перестанут здороваться.
Мы познакомились с роботом ASIMO второго поколения, который умеет приветствовать человека по-человечески. Если вы были знакомы с ASIMO раньше, при встрече робот узнает вас в лицо, назовет по имени, подойдет и протянет руку. Благодаря встроенному в руку сенсору, следящему за ладонью человека, кисть робота будет двигаться точно навстречу вашей. Робот сам постарается взять вас за руку, а не будет ждать, пока это сделаете вы. Если вы подойдете слишком близко, робот отступит назад, если расстояние будет велико — сделает шаг навстречу. Точные сервомоторы пальцев ASIMO сожмут вашу руку с усилием, адекватным вашему собственному.
Зачем инженерам Honda понадобилось обучать машину, по определению лишенную чувств, столь тонкому эмоциональному жесту? Ответ прост: чтобы ASIMO мог органично вписаться в человеческое общество, жить среди людей и помогать им, общаясь с ними на самом доступном и понятном языке — человеческом.
Полет над землей
Впервые мы познакомились с ASIMO в прошлом году на Московском международном автосалоне («ПМ», № 11'2006). Робот демонстрировал свои необыкновенные двигательные способности: ходил, плавно ускоряя и замедляя шаг, поворачивал, не сбавляя хода, поднимался и спускался по лестнице и даже танцевал рок-н-ролл (ASIMO расшифровывается как Advanced Step in Innovative Mobility). После шоу оператор робота Серж Делю по секрету рассказал нам о разработке ASIMO следующего поколения, способного передвигаться бегом. И вот год спустя именно бег по прямой, по кругу и по слаломному курсу стал гвоздем программы презентации нового ASIMO на открытии конгресса II Jornades de Robotica в Барселоне.
Новый ASIMO может бегать со скоростью до 6 км/ч, что примерно соответствуют быстрому человеческому шагу. Это очень важный навык. Раньше, идя рядом с роботом, нужно было ограничивать скорость ходьбы примерно до 2,7 км/ч. Теперь человек может идти в удобном для себя темпе, а маленький робот будет семенить рядом. Инженеры Honda считают, что 130-сантиметровый рост ASIMO оптимален для работы в окружении людей. Робот достаточно велик, чтобы доставать до столов и выключателей, катать тележки с напитками, брать вещи с относительно высоких полок, подниматься и спускаться по обычным лестницам. В то же время ASIMO имеет совершенно не устрашающий вид. Хотя, даже несмотря на крайне дружелюбный облик робота, есть немало людей, которым становится не по себе при близком знакомстве с механическим гуманоидом.
Напомним, что в основе стабильной ходьбы ASIMO лежит контроль поверхности, центра масс и положения. Робот ощущает поверхность с помощью специальных сенсоров на ступнях (поэтому ему не страшны неровности или наклонный пол), отслеживает ускорения центра тяжести и подбирает положение конечностей так, чтобы уравновесить все действующие на него силы. Каждая нога ASIMO содержит шесть сервоприводов: два в голеностопном суставе, три в тазобедренном и один в коленном. Главным ориентиром при создании робота послужила человеческая анатомия, поэтому, чтобы научить его бегать, в конструкции не пришлось ничего менять. Нужно было лишь решить несколько технических проблем.
Во время бега ASIMO отрывает от земли обе ноги одновременно. Его полет длится 0,08 секунды, примерно как у бегущего человека. «Полный отрыв от земли доставил нам наибольшее количество проблем, — рассказывает главный конструктор ASIMO Шиничи Мацунага. — Мы научили робота контролировать положение центра масс, даже не касаясь ногами земли». Необходимость подбрасывать робота в воздух и плавно принимать его вес при приземлении предъявила новые требования к мощности сервомоторов и прочности ступней, в том числе сенсоров поверхности. Все это пришлось заменить. Если во время медленной ходьбы человек полностью переносит вес тела с ноги на ногу, то на бегу он этим пренебрегает, полагаясь на быструю смену ног. Из-за смещенного центра тяжести робота поначалу разворачивало в сторону при сильном толчке. Поэтому в его торсе появился дополнительный сервомотор, чтобы компенсировать вращательный момент поворотом корпуса, опять же по-человечески. Разумеется, робота научили не только бегать по прямой, но и поворачивать, наклоняя корпус для компенсации центробежной силы.
Всегда начеку
Пожалуй, бег — это самый зрелищный навык нового ASIMO, однако вряд ли его можно считать главным. Судите сами: у первой модели робота было 26 осей свободы, у новой — 34, не считая приводов десяти гибких пальцев на руках. И лишь один новый мотор необходим для бега — тот, который отвечает за поворот торса. Дополнительный сервопривод появился в шее ASIMO — теперь робот может не только поворачивать, но и наклонять голову в стороны. И главное, по одной новой оси свободы получил каждый локоть робота и по две — каждое запястье. Это означает, что руки ASIMO стали гораздо более точными, умелыми и деликатными и робот научился выполнять множество новых бытовых задач. Во время шоу гуманоид показал, что он умеет не только танцевать и играть в футбол, но и работать — например, официантом. ASIMO принял заказ клиента, отправился на воображаемую кухню, сообщил о заказе повару, взял поднос с напитками, аккуратно пронес его через всю сцену и поставил на стол, не расплескав ни капли. В заключение робот засвидетельствовал свое почтение клиенту уважительным поклоном.
Чтобы выполнять повседневные поручения, робот должен уметь свободно перемещаться не только по пустой сцене, но и в обычном домашнем или офисном окружении. Для этого ему необходима мощная система планирования и коррекции маршрута в реальном времени. Рассчитывая свои передвижения, ASIMO основывается на показаниях сенсора поверхности, визуального и ультразвукового сенсоров. Визуальный сенсор — это не что иное, как две видеокамеры. Робот может не только распознавать отдельные объекты на видеоизображении, но и определять расстояние до них благодаря стереоэффекту. Сенсор поверхности состоит из лазерного и инфракрасного сканеров. С его помощью робот получает детальное представление о рельефе поверхности, на которую ему предстоит ступить, поэтому он никогда не упадет с лестницы и не поскользнется на банановой кожуре.
Ультразвуковые дальномеры, установленные примерно на уровне пояса ASIMO, сообщают роботу о точном расстоянии до объектов, которые могла не заметить камера: это предметы из стекла, объекты, расположенные за пределами обзора камеры (в том числе по бокам и за спиной робота), и препятствия, внезапно возникшие на пути. В отличие от видеоизображений, сигналы дальномера не требуют сложной вычислительной обработки, поэтому робот реагирует на них мгновенно. Это было продемонстрировано на примере: ASIMO попросили пройти из одного конца сцены в другой, после чего на его пути внезапно встал человек. Робот мгновенно остановился, хотя и не потерял привычной плавности движений, и торжественно объявил: «Вы преградили мне путь!» Разумеется, ASIMO может разработать альтернативный маршрут движения и обойти препятствие, если оно не будет ликвидировано.
Ученик и учитель
Самое вкусное всегда оставляют напоследок. Ближе к концу презентации ASIMO пригласил на сцену своего «учителя». На сцену вышел профессор Эдгар Кернер, специалист в области биомедицины и электротехники, и робот вежливо поклонился своему сенсею. Кернер вкратце рассказал о том, что разработчики искусственного интеллекта ASIMO стремятся воссоздать человеческий мозг так же, как создатели ног робота опирались на знания о человеческом скелете. На экране промелькнуло несколько забавных картинок, проводящих аналогии между долями мозга и блоками процессора ASIMO. Но следующий видеоролик действительно поразил воображение присутствующих. Оказывается, ASIMO назвал профессора Кернера учителем отнюдь не в фигуральном смысле. Человек на экране обращался к ASIMO на английском языке, жестами предлагал пройти в то или иное место, показывал предметы, просил запомнить их названия и произвести определенные действия. Робота не программировали на компьютере, а учили, как ребенка.
В основе общительности ASIMO лежит сложнейшая система распознавания человека по видеоизображению. Робот не только может отличить человека от шкафа, но и хорошо представляет себе, где у него голова, глаза и руки, в каком положении он находится, какой жест показывает. ASIMO может распознать и узнать в лицо не только стоящего, но и движущегося человека, поэтому он всегда готов к общению. Если помахать роботу рукой, он ответит тем же. Если жестом показать ему, куда следует отправиться, он проанализирует положение руки и головы человека в трехмерном пространстве, точно определит точку, на которую он указывает, и направится туда. «ASIMO, это чашка», — говорит человек, обращаясь к роботу, и повторяет слово несколько раз. ASIMO умеет формулировать и запоминать характерные особенности незнакомых объектов. Если в следующий раз попросить его принести чашку, он найдет ее независимо от положения и ракурса, в котором она предстанет перед его камерами. «ASIMO, помести ложку в чашку», — просит человек и показывает роботу пример. ASIMO не столь силен в пространственном моделировании, чтобы сразу понять, как это делается. Зато он умеет учиться на собственных ошибках. Робот пробует пронести ложку сквозь стенку чашки, но отступает, ощутив препятствие. Затем пробует еще. После нескольких попыток команду удается выполнить. ASIMO запоминает, как это делается, и в следующий раз может выполнить задачу правильно с первого раза. Обучение происходит без единого специального термина, исключительно простым языком, жестами и наглядными примерами.
Согласитесь, робот, исполняющий лишь стандартный набор команд, скорее приходится родственником микроволновке, нежели человеку, даром что стоит на двух ногах. Программируемый робот, функции которого может расширить специалист или продвинутый пользователь, — это хороший помощник, но далеко не для всех. А вот ASIMO, с которым можно договориться простыми словами, в будущем сможет оказать помощь каждому, кто в этом нуждается. По прогнозам Эдгара Кернера, такое светлое будущее наступит не ранее чем через 20 лет. На сегодняшний день ASIMO не только баснословно дорог, но и не совсем готов к жизни среди людей.
Сам себе хозяин
После прошлогоднего шоу в Москве оператор ASIMO Серж Делю рассказал нам, что показательные выступление робота на публике проходят по заранее записанной программе, с отключенными сенсорами и с минимальным участием искусственного интеллекта. Большое скопление людей, фотовспышки, громкие аплодисменты могут сбить ASIMO с толку, поэтому на шоу приходится демонстрировать лишь имитацию самостоятельной работы робота в лабораторных условиях.
Во время презентации в Барселоне мы были уверены, что ASIMO находится в управляемом режиме. Удивляло лишь то, что Серж Делю на этот раз находился среди публики, хотя и был всецело погружен в происходящее на операторском мониторе. После шоу Серж разрешил наши сомнения: оказывается, шоу было абсолютно честным! Чтобы ASIMO не мог видеть вспышки камер и зрителей, по периметру сцены установили обманные световые рампы. В качестве ориентира на полу нарисовали пару меток. Робот выполнял команды, танцевал, бегал, играл в футбол, ходил по лестнице и приветствовал гостей (среди которых был мэр Барселоны) исключительно по воле своего собственного искусственного интеллекта. ASIMO совершил колоссальный прогресс по сравнению с первой моделью, особенно в плане общительности, интеллекта, человечности. Если так пойдет и дальше, то следующее интервью о проекте мы будем брать у самого ASIMO.
Бесценный кадр
· 
ASIMO — это не коммерческий продукт. Робота нельзя купить ни за какие деньги, и он не поступит в продажу в обозримом будущем, хотя уже сегодня нашлось бы немало состоятельных людей, готовых предложить за японское чудо техники любую цену. «Мы попали в очень непростую ситуацию на представлении в одной из арабских стран, — рассказывает координатор шоу Жан-Люк де Краэ. — Какой-то местный шейх хотел купить ASIMO и был готов выложить за него любую сумму, а отказать таким людям очень непросто».
Зачем же компания Honda занимается постоянным совершенствованием человекоподобного робота? Прежде всего, ASIMO — это универсальная исследовательская платформа для самых разных технологий. Искусственный интеллект и решение логических задач, согласованное управление точной механикой, ориентация в пространстве, надежное автономное питание — все это находит применение не только в робототехнике, но и в автомобилестроении. Яркий пример передовых компьютерных технологий в автомобилях — система курсовой стабилизации, радарный круиз-контроль, системы автоматической парковки, гибридные силовые установки. ASIMO — это далекий взгляд в будущее технологий, без которого современная автомобильная компания обречена на провал.
Кроме того, ASIMO играет важную образовательную роль. С момента публичного дебюта робота в 2003 году с ним успели познакомиться тысячи детей в разных странах Европы. Робот побывал на множестве крупных выставок, посетил ведущие музеи естественных наук. Дружелюбный, высокотехнологичный, невероятный и в то же время реальный ASIMO способен заинтересовать детей и продемонстрировать им, что наука — это вовсе не скучно. Возможно, именно робот Honda поможет будущим ученым, конструкторам, изобретателям и исследователям выбрать свой жизненный путь.
Статья опубликована в журнале «Популярная механика» (№62, декабрь 2007).
=
https://ru.wikipedia.org/wiki/Шагоход
Шагоход
[править | править вики-текст]
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 22 ноября 2015; проверки требуют 12 правок.

Четвероногий шагоход — экспонат Военно-транспортного музея Армии США.
Шагоходы, или шагающие машины — разнообразные машины, передвигающиеся при помощи сгибающихся или вращающихся на шарнире опорных конструкций («ног»), методом их синхронизированной поступательной перестановки (внешне напоминающей шаг человека или животного, т. е. машины на «шагающем» ходу) с гидравлическими, механическими, электрическими и другими приводами указанных конструкций и их комбинациями — электромеханическими, гидромеханическими и т. д. Ввиду конструктивной сложности исполнения, неясности целевого предназначения, и как следствие, неопределённости сферы практического применения с одной стороны, а с другой стороны — дешевизны, надёжности и простоты в эксплуатации сухопутных машин на традиционных вариантах подвижной платформы (в первую очередь, колёсной, гусеничной, рельсовой, канатно-тросовой, а также фрезерно-кольцевой, магнитно-левитационной и др.), шагающие машины пока не получили в реальной жизни большого распространения. Из используемых на практике механизмов можно назвать шагающие экскаваторы. Другими немаловажными факторами, препятствующими внедрению их в промышленность и народное хозяйство (как, впрочем, и внедрению в качестве военной техники) и требующими решения, являются энергозатраты, относительно высокие сами по себе и возрастающие по мере увеличения массы перемещаемого тела машины, длины подвижных опорных конструкций (шагающих «конечностей») и амплитуды шага, а также вестибулярные нагрузки на человека-оператора (водителя) ввиду неустойчивого положения кабины оператора в «двуногих» и «четвероногих» моделях (поэтому основное направление работ, реализующее такие варианты конфигурации шагающих опорных конструкций — робототехника, не требующая нахождения человека в машине и управляемая дистанционно или бортовым компьютером с заложенным алгоритмом действий).
Шагоходы весьма популярны в научной фантастике как возможные примеры наземной техники (в том числе боевой), — в частности встречаются в аниме и манге, где активно используются в качестве жанровой особенности меха-сэнтай. В сравнении с колёсной и гусеничной техникой шагоходам свойственна повышенная проходимость по пересеченной местности. Главной проблемой в создании шагоходов является соотношение цены и эффективности (в том числе маршевой скорости движения), а также отсутствие достаточно энергоемких и при этом компактных источников энергоустановки и быстродействующих приводов для ходовых ног. Однако сейчас уже ведутся разработки по созданию полноценных шагающих машин.
Содержание
[скрыть]
· 1Шагоходы в робототехнике
· 2Шагоходы в фантастике
o 2.1Компьютерные игры
· 3Шагоходы в кино
· 4См. также
· 5Примечания
· 6Ссылки
Шагоходы в робототехнике[править | править вики-текст]

| Этот раздел не завершён . Вы поможете проекту, исправив и дополнив его. |

Роботы BigDog
В настоящий момент шагоходы (также часто называемые «ме́хи») разрабатываются американской фирмой «Mechanized Propulsion Systems». Представители фирмы обещают создать образец, пригодный для боевого применения, к 2025 году.
В 2005 году фирмой Boston Dynamics был создан четырёхногий шагающий транспортный робот BigDog[1].
Шагоходы в фантастике[править | править вики-текст]
Основная статья: Мех (бронетехника)
Одно из первых появлений шагающих машин состоялось в книгах классиков фантастики: Жюля Верна, в его романе «Паровой Дом», и у Герберта Уэллса «Война миров» (словосочетание «боевые треножники» стало нарицательным).
Компьютерные игры[править | править вики-текст]
· В компьютерных играх Chrome и Chrome SpecForce есть возможность управлять несколькими видами двуногих шагоходов.
· Во вселенной Warhammer 40,000 шагоходы широко представлены в виде киборгов-дредноутов Космического Десанта, машин-разведчиков часовых Имперской Гвардии, боевыми мехами Эльдар и Тау, Титанов-Гаргантов орков и шагающих вариантов огромных машин Титанов
· Различные вариации шагоходов присутствуют в качестве юнитов в стратегиях «StarCraft», «BattleZone», «Command & Conquer 2», «War Front: Turning Point», «Emperor: Battle for Dune», «Command & Conquer 3», «Warhammer 40,000: Dawn of War», «Earth 2140», «Earth 2150», «Earth 2160».
· В шутерах «Quake IV», «Chrome», «Unreal Tournament 3», «Battlefield 2142», «F.E.A.R. 2: Project Origin», «F.E.A.R. 3», «Combat Arms», «Black Ops 2» имеется возможность управлять шагающими роботами.
· В онлайн-игре «RF Online» специалисты расы Беллато могут управлять шагающими роботами MAU.
· В играх по вселенной «Star Wars».
· В серии игр MechWarrior это основное устройство, которым управляет игрок. В серии игр MechCommander, а также на любительском MMO MegaMek игрок управляет подразделением подобных устройств в комбинации с другой техникой.
· Сюжеты компьютерных игр серии Metal Gear основаны на захвате террористами шагающих танков Metal Gear, которые являются ходячими платформами для запуска ядерных ракет. В конце почти каждой игры серии игрок должен уничтожить Metal Gear.
· В игре Warcraft III: Reign of Chaos и её адд-оне Warcraft III: The Frozen Throne в гоблинских лабораториях за деньги можно нанять механического дровосека — Резака, которым управляет гоблин. Данные машины в некотором роде являются мехами. Эти механизмы присутствуют также и в MMORPG World of Warcraft
· В играх серии Half life 2 на вооружении Альянса стоят страйдеры (англ. strider — «шагун»), боевые шагоходы, похожие на описанные Гербертом Уэллсом треножники марсиан.
· В игре Dishonored присутствуют патрульные в шагающих костюмах, которые также являются мехами.
· Игра Titanfall почти полностью построена на управлении титаном, являющимся шагоходом.
Шагоходы в кино[править | править вики-текст]
· Робот ED-209 противостоит Робокопу на протяжении трилогии Робот-полицейский.
· В киновселенной «Звёздных Войн» на вооружении войск Империи стоят гигантские шагоходы AT-AT и лёгкие AT-ST. В распоряжении Республики — тяжёлые AT-TE.
· В фильме «Война миров» используют гигантские боевые треножники.
· Шагоход использовался в одной из вымышленных сцен-мечтаний главной героини фильма «Запрещённый приём».
См. также[править | править вики-текст]
· Бипедализм
· Экзоскелет
· Шагающий экскаватор
· Меха (жанр)
· Мех (бронетехника)
Примечания[править | править вики-текст]
1. ↑ Boston Dynamics: Changing Your Idea of What Robots Can Do
Ссылки[править | править вики-текст]
· Membrana.ru : Молодые инженеры ставят на ноги шагающего монстра
· Membrana.ru : Двуногий робот Land Walker — не ходок, а каток
· http://www.mechaps.com (англ.)
· http://www.sakakibara-kikai.co.jp (яп.)
· Шуточное подражание — шагоход на базе «Оки»
· Видео John Deere walking tractor
· Видео Menzi Muck A91
· Шагоход в вики-проекте, посвященному вселенной «Звёздных войн»
=
https://ru.wikipedia.org/wiki/BigDog
BigDog
[править | править вики-текст]
Материал из Википедии — свободной энциклопедии
| BigDog | |
|
| |
| Страна-производитель |  США США
|
| Тип робота | Боевой робот |
| Разработан в | 2005 г. |
| Разработчик | Boston Dynamics, Foster-Miller, Лаборатория реактивного движения, Harvard University Concord Field Station |
| Реализация | опытный образец |
| Сайт | http://www.bostondynamics.com/robot_bigdog.html |

BigDog — четырёхногий робот с адаптивным управлением, созданный в 2005 году фирмой Boston Dynamics совместно с Foster-Miller, Лабораторией реактивного движения (NASA) и Harvard University Concord Field Station[1].
Содержание
[скрыть]
· 1Описание
· 2Устройство
· 3См. также
· 4Примечания
· 5Ссылки
Описание[править | править вики-текст]
Проект BigDog финансируется Defense Advanced Research Projects Agency с надеждой на то, что он сможет переносить снаряжение и помогать солдатам на территории, где не способен передвигаться обычный транспорт. Вместо колёс и гусениц BigDog использует четыре ноги. В ногах находится большое количество разнообразных сенсоров. Также у BigDog имеется лазерный гироскоп и система бинокулярного зрения[источник не указан 428 дней].
Длина робота BigDog — 0,91 метра, высота 0,76 метра, вес 110 килограммов. В настоящее время он способен передвигаться по труднопроходимой местности со скоростью 6,4 км в час, перевозить 154 кг груза и подниматься на 35 градусную наклонную плоскость[1]. Его передвижение контролирует компьютерная система, которая получает данные от различных сенсоров. Навигация и равновесие также управляются этой системой.
18 марта 2008 года Boston Dynamics выпустила видео о новом поколении робота BigDog. Видео показывает возможность робота ходить по ледяной поверхности и возможность восстанавливать равновесие после удара сбоку[источник не указан 428 дней].
В конце ноября 2015 года компания заявила, что прекращает дальнейшие работы по развитию BigDog[2]. Были названы две главные причины: ограниченные возможности робота и слишком громкий демаскирующий шум, с которым так и не удалось справиться разработчикам. В связи с этим компания переключилась на робота Spot — это меньший вариант BigDog, который работает на тихом электродвигателе и, как заявляется, более ловкий.
Устройство[править | править вики-текст]
BigDog приводится в движение двухтактным одноцилиндровым двигателем от карта со скоростью вращения 9000 об/мин, из-за чего слышен громкий звук мотора. В последующих версиях робота планировалось исправить этот демаскирующий недостаток, но этого сделать так и не удалось. Мотор служит приводом для гидронасоса, который в свою очередь питает гидродвигатели ног. В каждой из ног установлено по 4 гидродвигателя (два для бедренного сустава и по одному для коленного и голеностопного суставов), общее их число — 16. Каждый из гидродвигателей состоит из гидроцилиндра, сервоклапана, а также датчиков положения и усилия. Робот обладает хорошей устойчивостью: во время испытаний он не падал при проходе по льду и при сильных толчках[источник не указан 428 дней].
Бортовой компьютер робота представляет собой упрочнённый вариант платформы PC/104 с процессором класса Pentium под управлением ОС QNX[3].
См. также[править | править вики-текст]
· Walking Truck
Примечания[править | править вики-текст]
1. ↑ Перейти к:12 Boston Dynamics(недоступная ссылка — история). Проверено 19 марта 2008. Архивировано из первоисточника 10 мая 2006.
2. ↑ Компания Boston Dynamics прекращает работу по дальнейшему развитию роботов серии BigDog
3. ↑ BigDog Overview. Boston Dynamics (22 ноября 2008). Архивировано из первоисточника 11 марта 2012.
Ссылки[править | править вики-текст]
· Boston Dynamics’s BigDog site
· Boston Dynamics Big Dog на YouTube (Video demonstration)
=
https://www.youtube.com/watch?v=W1czBcnX1Ww
Boston Dynamics Big Dog (new video March 2008)
=
https://www.youtube.com/watch?v=wE3fmFTtP9g
Introducing WildCat
=
https://www.youtube.com/watch?v=0Y-FSW6u_oA
3 SUPER COOL robotic animals you must see!
=
https://www.youtube.com/watch?v=L-s8Q600WRQ
7 ANIMAIS ROBÔS REALISTAS MAIS IMPRESSIONANTES
=
https://ru.wikipedia.org/wiki/Андроид
Андроид
[править | править вики-текст]
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 14 февраля 2013; проверки требуют 99 правок.
Основная статья: Робот
Эта статья — о человекоподобных роботах. Об операционной системе для портативной электроники см. Android .
У этого термина существуют и другие значения, см. Андроид (значения) .
Андро́ид (от греч. корня ἀνδρ- слова ἀνήρ — «человек, мужчина» и суффикса -oid — от греч. слова εἶδος — «подобие») — человекоподобный. В современном значении обычно подразумевается робот.
Содержание
[скрыть]
· 1Этимология
· 2История
o 2.1Современные человекоподобные роботы
§ 2.1.1Андроиды в научной фантастике
· 3См. также
· 4Примечания
Этимология[править | править вики-текст]
В некоторых русскоязычных источниках выдвигается гипотеза, что слово «андроид» произошло от имени Анри-Луи Жаке-Дро (фр.)русск. (1752—1791)[1][2], сына и помощника создателя первых механических игрушек — Пьера Жаке-Дро (фр.)русск.. Однако французское имя Henri-Louis Jaquet-Droz (произносится как Анри-Луи Жаке-Дро) имеет мало общего со словом «androïde» (звучит примерно как «андроид», где «н» произносится в нос). К тому же слово «андроид» (англ. Androides) и его этимология приводятся в «Циклопедии» Эфрейма Чэймберса, изданной ещё в 1728 году. В языковых словарях данная версия происхождения термина также не поддерживается.
Слово «дроид» (робот из эпопеи «Звёздные войны») Джордж Лукас получил путём сокращения от «андроид».
С понятием андроида также соприкасается значение слова «киборг», переводящееся как кибернетический организм. Тут делается смысловой акцент на самом симбиозе биологических и электронно-механических систем.
В советской научной фантастике часто фигурирует слово «кибер», приблизительно соответствующий по смыслу слову «андроид».
История[править | править вики-текст]
Создание первого андроида приписывается Альберту Кельнскому[3]. Значительную роль в популяризации термина сыграл французский писатель Филипп Огюст Матиас Вилье де Лиль-Адам, использовав его в своём романе «Будущая Ева» (фр. L'Ève future) для обозначения человекоподобного робота, описывая искусственную женщину Адали (Hadaly). Созданная Томасом Эдисоном Адали разговаривала с помощью фонографа, выдающего одну за другой классические цитаты.
Одним из первых человекообразных стал George американского изобретателя Тони Сейла (1949).
Современные человекоподобные роботы[править | править вики-текст]

Гиноид «Актороид», продемонстрированный Осакским университетом совместно с корпорацией Kokoro на выставке Экспо-2005 (Япония)
· Aiko — гиноид с имитацией человеческих чувств: осязание, слух, речь, зрение[4].
· TOPIO — андроид, разработанный для игры в настольный теннис против человека[5].
· ASIMO — андроид, созданный корпорацией Хонда, в Центре Фундаментальных Технических Исследований Вако (Япония)[6].
· Einstein Robot — голова робота с внешностью Эйнштейна. Модель для тестирования и воспроизведения роботом человеческих эмоций[7].
· EveR-1 — робот, похожий на 20-летнюю кореянку: её рост 1,6 метра, а вес — около 50 килограммов. Ожидается, что андроиды вроде EveR смогут служить гидами, выдавая информацию в универмагах и музеях, а также развлекать детишек[8].
· HRP-4C — робот-девушка, предназначенная для демонстрации одежды. Рост робота составляет 158 см, а вес вместе с батареями — 43 кг. Что касается степеней свободы, их 42, к примеру, в области бёдер и шеи их по три, а в лице — восемь, они дают возможность выражать эмоции[9].
· Repliee R-1 — человекоподобный робот с внешностью японской пятилетней девочки, предназначенная для ухода за пожилыми и недееспособными людьми[10].
· Repliee Q2 — робот-девушка под рабочим названием Repliee Q1expo был показан на международной выставке World Expo, проходившей в Айти (Aichi), Япония. На демонстрациях он исполнял роль телевизионного интервьюера, при этом постоянно взаимодействуя с людьми. В роботе были установлены всенаправленные камеры, микрофоны и датчики, которые позволяли Repliee Q2 без особых трудностей определять человеческую речь и жестикуляцию[11].
· Ибн Сина — андроид, названный в честь древнего персидского философа и врача Ибн Сины. Один из самых продвинутых современных (2010 год) андроидов. Говорит на арабском языке. Способен самостоятельно найти своё место в самолёте, общаться с людьми. Распознаёт выражение лица говорящего и прибегает к соответствующей ситуации мимике. Его губы двигаются довольно монотонно, однако отмечается, что особенно хорошо у него получается поднимать брови и прищуривать глаза[12].
· Франк (Франкенштейн) — первый биоробот, созданный в 2011 году Бертольтом Мейером из Цюрихского университета[13].
Андроиды в научной фантастике[править | править вики-текст]
Тему человекоподобных роботов поддерживали произведения, печатавшиеся в Pulp-журналах на рубеже 1890-1910 гг. В одних научно-фантастических произведениях андроиды описаны как имеющие человеческую внешность электромеханические роботы. В других произведениях авторы называли андроидами полностью органические, но искусственные создания. Существовало также и множество промежуточных значений. Поскольку андроиды — это человекоподобные роботы, то часто, для увеличения сходства с человеком, в научной фантастике в конструкцию андроидов добавляют различные органические элементы (кожа, ткани, кровь и т.д.).
Также во многих научно-фантастических произведениях андроидам стирают память, в результате чего они живут, не зная о своём истинном происхождении.
См. также[править | править вики-текст]
· Android
· Гиноид
· Киборг
· Гуманоид
· Первые Олимпийские игры роботов-андроидов
· Зловещая долина
Примечания[править | править вики-текст]
1. ↑ История технической игрушки. Автоматы. Герон. Театр автоматов. Музей. Кукла. Писец. Механика. Дро. Андроиды. Робот
2. ↑ Отряшенков Ю. М. Юный кибернетик. — Детская литература, 1978
3. ↑ Чэймберс, Эфрейм (англ.)русск.. Циклопедия, или универсальный словарь искусств и наук (англ.)русск.
4. ↑ Aiko — женский робот-андроид с искусственным интеллектом. Фото и видео.
5. ↑ Официальный сайт робота TOPIO
6. ↑ Официальная страница робота ASIMO на сайте компании Хонда
7. ↑ Робот Эйнштейн на службе науки. Фото и видео.
8. ↑ Корея обнародовала девушку-андроида
9. ↑ Новый робот-женщина усердно уподобляется человеку
10. ↑ Фото и видео человекоподобного робота Replie R-1
11. ↑ Repliee Q2 — самый «человечный» андроид
12. ↑ Андроид-путешественник
13. ↑ Woollaston V. Meet Frank, the world's first walking, talking bionic man complete with artificial limbs and a beating HEART (англ.) // Daily Mail : газета. — 2013. — 18 October.
=
https://ru.wikipedia.org/wiki/Биомеханика
Биомеханика
[править | править вики-текст]
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 29 апреля 2016; проверки требуют 14 правок.
У этого термина существуют и другие значения, см. Биомеханика (театральная) .

| Вводный раздел этой статьи слишком длинный. Пожалуйста, переместите избыточную информацию из преамбулы в тело статьи. Преамбула должна содержать доступный сжатый пересказ ключевых положений. |
Биомеха́ника — раздел естественных наук, изучающий на основе моделей и методов механики механические свойства живых тканей, отдельных органов и систем, или организма в целом, а также происходящие в них механические явления.
Содержание
[скрыть]
· 1Биомеханика человека — составная часть прикладных наук, которая изучает статику и движения человека
o 1.1Клиническая биомеханика
o 1.2Задачи и содержание спортивной биомеханики (биомеханика спорта)
o 1.3Инженерная биомеханика
o 1.4Спортивная биомеханика (Биомеханика спорта)
o 1.5Биомеханика трудовых действий и рабочих поз
o 1.6Теоретическая биомеханика
§ 1.6.1Компьютерная биомеханика
o 1.7Театральная биомеханика
· 2История
o 2.1Истоки биомеханики
o 2.2Возникновение биомеханики как науки
o 2.3Современный этап развития биомеханики
· 3Примечания
· 4См. также
· 5Ссылки
Биомеханика человека — составная часть прикладных наук, которая изучает статику и движения человека[править | править вики-текст]

| Возможно, этот раздел содержит оригинальное исследование . Добавьте ссылки на источники, в противном случае он может быть удалён. Дополнительные сведения могут быть на странице обсуждения. (5 июля 2013) |
Биомеханические исследования охватывают различные уровни организации живой материи: биологические макромолекулы, клетки, ткани, органы, системы органов, а также целые организмы и их сообщества.
Чаще всего объектом исследования этой науки является движение животных и человека, а также механические явления в тканях, органах и системах. Под механическим движением понимается движение всей биосистемы в целом, а также движение отдельных частей системы относительно друг друга — деформация системы. Все деформации в биосистемах связаны с биологическими процессами, которые играют решающую роль в движениях животных и человека. Это сокращение мышцы, деформация сухожилия, кости, связок, фасций, движения в суставах.
Отдельным направлением биомеханики является биомеханика дыхательного аппарата, его эластичное и неэластичное сопротивление, кинематика (то есть геометрическая характеристика движения) и динамика дыхательных движений, а также другие стороны деятельности дыхательного аппарата в целом и его частей (лёгких, грудной клетки); биомеханика кровообращения изучает упругие свойства сосудов и сердца, гидравлическое сопротивление сосудов току крови, распространение упругих колебаний по сосудистой стенке, движение крови, работу сердца и др.
Биомеханика человека — наука комплексная, она включает в себя самые разнообразные знания других наук, таких как: механика и математика, функциональная анатомия и физиология, возрастная анатомия и физиология, педагогика и теория физической культуры.
Движения частей тела человека представляют собою перемещения в пространстве и времени, которые выполняются во многих суставах одновременно и последовательно. Движения в суставах по своей форме и характеру очень разнообразны, они зависят от действия множества приложенных сил. Все движения закономерно объединены в целостные организованные действия, которыми человек управляет при помощи мышц. Учитывая сложность движений человека, в биомеханике исследуют и механическую, и биологическую их стороны, причём обязательно в тесной взаимосвязи.
Поскольку человек выполняет всегда осмысленные действия, его интересует, как можно достичь цели, насколько хорошо и легко это получается в данных условиях. Для того чтобы результат движения был лучше, и достичь его было бы легче, человек сознательно учитывает и использует условия, в которых осуществляется движение. Кроме того, он учится более совершенно выполнять движения. Биомеханика человека учитывает эти его способности, чем существенно отличается от биомеханики животных.
Таким образом, биомеханика человека изучает, какой способ и какие условия выполнения действий лучше и как овладеть ими. Общая задача изучения движений состоит в оценке эффективности приложения сил для достижения поставленной цели. Всякое изучение движений, в конечном счете, направлено на то, чтобы помочь лучше выполнять их. Прежде, чем приступить к разработке лучших способов действий, необходимо оценить уже существующие. Отсюда вытекает общая задача биомеханики, сводящаяся к оценке эффективности способов выполнения изучаемого движения. Биомеханика исследует, каким образом полученная механическая энергия движения и напряжения может приобрести рабочее применение. Рабочий эффект измеряется тем, как используется затраченная энергия. Для этого определяют, какие силы совершают полезную работу, каковы они по происхождению, когда и где приложены. То же самое должно быть известно о силах, которые производят вредную работу, снижающую эффективность полезных сил. Такое изучение дает возможность сделать выводы о том, как повысить эффективность действия. При решении общей задачи биомеханики возникают многочисленные частные задачи, не только предусматривающие непосредственную оценку эффективности, но и вытекающие из общей задачи и ей подчиненные.
Метод биомеханики — системный анализ и системный синтез движений на основе количественных характеристик, в частности кибернетическое моделирование движений. Биомеханика, как наука экспериментальная, эмпирическая, опирается на опытное изучение движений. При помощи приборов регистрируются количественные характеристики, например траектории скорости, ускорения и др., позволяющие различать движения, сравнивать их между собой. Рассматривая характеристики, мысленно расчленяют систему движений на составные части — устанавливают её состав. В этом — суть системного анализа.
Система движений как целое — не просто сумма её составляющих частей. Части системы объединены многочисленными взаимосвязями, придающими ей новые, не содержащиеся в её частях качества (системные свойства). Необходимо представлять это объединение, устанавливать способ взаимосвязи частей в системе — её структуру. В этом — суть системного синтеза. Системный анализ и системный синтез неразрывно связаны друг с другом, они взаимно дополняются в системно-структурном исследовании.
При изучении движений в процессе развития системного анализа и синтеза в последние годы все шире применяется метод кибернетического моделирования — построение управляемых моделей (электронных, математических, физических и др.) движений и моделей тела человека.
Клиническая биомеханика[править | править вики-текст]
Клиническая (медицинская) биомеханика является составной частью медицинских наук: ортопедии, травматологии, протезирования, (реабилитологии (лечебной физкультуры), педиатрии, физиологии и мн. других.
Клиническая биомеханика — научное направление, в котором с позиций механики и общей теории управления с помощью специализированных методов исследования изучается двигательная активность человека в норме и патологии[1].
Основные разделы:
· Биомеханика нормальной и патологической ходьбы .
· Биомеханика скелетной травмы
· Биомеханика крупных суставов.
· Биомеханика позвоночника[2]
· Биомеханика стопы
Изучаемые явления:
· Ходьба человека — филогенетически древняя хорошо автоматизированая и цикличная локомоция. Изучение анализа ходьбы удобно тем, что в её осуществлении участвует весь опорно-двигательный аппарат. Это дает возможность исследовать функцию любых его отделов, включая верхние конечности и позвоночник.
· Основная стойка — положение и движения общего центра массы тела (при стоянии обследуемого на специальной платформе — метод стабилометрии).
· Статические положения. Информация о конечных положениях позволяет оценить взаимоположение сегментов тела и определить амплитуду движений. Например, оценка формы позвоночника производится в трёх плоскостях — фронтальной, сагиттальной и горизонтальной. Оценивается наклон таза в сагиттальной и фронтальной плоскостях, наклон надплечий во фронтальной плоскости. Соотношение тазового и плечевого пояса оценивается во фронтальной и горизонтальной плоскостях. Кроме того, во фронтальной плоскости оценивается наклон надплечий относительно таза, а в горизонтальной — разворот надплечий относительно таза. Другим примером статического положения является лежачее положение.[3]
Основные методы исследования:
· ихнометрия — измерение пространственных характеристик шага;
· подометрия — измерение временных характеристик шага;
· гониометрия — измерение кинематических характеристик движений в суставах;
· динамометрия — регистрация реакций опоры;
· электромиография — регистрация поверхностной ЭМГ;
· стабилометрия — регистрация положения и движений общего центра давления на плоскость опоры при стоянии.
Задачи и содержание спортивной биомеханики (биомеханика спорта)[править | править вики-текст]
Как самостоятельная научная дисциплина биомеханика физических упражнений обогащает теорию физического воспитания, исследуя одну из сторон физических упражнений— технику. Вместе с тем, биомеханика физических упражнений непосредственно используется в практике физического воспитания. Как учебный предмет биомеханика содержит главные положения учения о движениях, обобщённый и систематизированный опыт изучения общих объективных закономерностей. Объект познания биомеханики — двигательные действия человека как системы взаимно связанных активных движений и положений его тела. Задачами спортивной биомеханики являются:
· изучение особенности техники выдающихся спортсменов;
· определение рациональной организаций действий;
· разработка методических приёмов освоения движений, методы технического самоконтроля и совершенствования техники.
Биомеханика физических упражнений делится на общую, дифференциальную и частную.
· Общая биомеханика решает теоретические проблемы и помогает узнать, как и почему человек двигается. Этот раздел биомеханики очень важен для практики физического воспитания и спорта.
· Дифференциальная биомеханика изучает индивидуальные и групповые особенности двигательных возможностей и двигательной деятельности. Изучаются особенности, зависящие от возраста, пола, состояния здоровья, уровня физической подготовленности, спортивной квалификации и т. п.
· Частная биомеханика рассматривает конкретные вопросы технической и тактической подготовки в отдельных видах спорта и разновидностях массовой физкультуры. В том числе в оздоровительном беге и ходьбе, общеразвивающих гимнастических упражнениях, ритмической гимнастике на суше (аэробика) и в воде (акваробика) и т. п. Основной вопрос частной биомеханики — как научить человека правильно выполнять разнообразные движения или как самостоятельно освоить культуру движений.
Биомеханика занимает особое положение среди наук в физическом воспитании и спорте. Она базируется на анатомии, физиологии и фундаментальных научных дисциплинах — физике (механике), математике, теории управления. Взаимодействие биомеханики с биохимией, психологией и эстетикой дало жизнь новым научным направлениям, которые, едва родившись, уже приносят большую практическую пользу. В их числе «психобиомеханика», энергостатические и эстетические аспекты биомеханики.
Инженерная биомеханика[править | править вики-текст]
Составная часть медико-биологической науки Протезостроение
Спортивная биомеханика ( Биомеханика спорта )[править | править вики-текст]
Спортивная биомеханика - раздел биомеханики, изучающий технику выполнения спортивных двигательных действий.
Биомеханика трудовых действий и рабочих поз[править | править вики-текст]
Составная часть науки эргономика (гигиена труда).
Теоретическая биомеханика[править | править вики-текст]
Теоретическая биомеханика — наука, основанная на применении математической методологии и математического аппарата.
Компьютерная биомеханика[править | править вики-текст]
Одним из ответвлений теоретической биомеханики является компьютерная биомеханика, компьютерное моделирование. Она интенсивно развивается, пополняя теоретическую биомеханику новыми знаниями.
Театральная биомеханика[править | править вики-текст]
Как театральный, термин был введен В. Э. Мейерхольдом в его режиссёрскую и педагогическую практику в начале 1920-х гг. для обозначения новой системы подготовки актера. «Биомеханика стремится экспериментальным путём установить законы движения актера на сценической площадке, прорабатывая на основе норм поведения человека тренировочные упражнения игры актера». (В. Э. Мейерхольд.) Театральная биомеханика в своей теоретической части, с одной стороны, опиралась на психологическую концепцию У. Джемса (о первичности физической реакции по отношению к реакции эмоциональной), на рефлексологию В. М. Бехтерева и эксперименты И. П. Павлова. С другой стороны, биомеханика представляла собой применение идей американской школы организации труда последователей Ф. У. Тейлора в сфере актёрской игры (т. н. «тейлоризацию театра»): «Поскольку задачей игры актера является реализация определенного задания, от него требуется экономия выразительных средств, которая гарантирует точность движений, способствующих скорейшей реализации задания». (В. Э. Мейерхольд.) Биомеханика Мейерхольда тесно переплелась с научной биомеханикой, которую создавал в Центральном институте труда А. К. Гастев[4]. В практической части разработки биомеханических упражнений для актёра использовался опыт прошлого театра: сценическая техника комедии дель арте, методы игры Э. Дузе, С. Бернар, Дж. Грассо, Ф. Шаляпина, Ж. Коклена и др. Биомеханическая техника противопоставлялась другим школам актёрской игры: «нутра» и «переживания», вела от внешнего движения к внутреннему. Актёр-биомеханист по Мейерхольду должен был обладать природной способностью к рефлекторной возбудимости и физическим благополучием (точным глазомером, координацией движения, устойчивостью и т. д.). Созданные Мейерхольдом тренировочные биомеханические этюды имели общую схему: «отказ» — движение, противоположное цели; «игровое звено» — намерение, осуществление, реакция. «Биомеханика есть самый первый шаг к выразительному движению» (С. М. Эйзенштейн)[5].
История[править | править вики-текст]
История биомеханики неразрывно связана с историей техники, физики, биологии и медицины, а также с историей физической культуры и спорта. Многие достижения этих наук определяли развитие учения о движении живых существ.
Современную биомеханику нельзя представить без законов механики, открытых Архимедом, Галилеем, Ньютоном, без физиологии Павлова, Сеченова, Анохина, так как и без современных компьютерных технологий.
Истоки биомеханики[править | править вики-текст]
|
| В этой статье или разделе имеется избыток цитат либо слишком длинные цитаты. Излишние и чрезмерно большие цитаты следует обобщить и переписать своими словами. Возможно, эти цитаты будут более уместны в Викицитатнике или в Викитеке. |
Биомеханика — одна из самых старых ветвей биологии. Её истоками были работы Аристотеля, Галена, Леонардо да Винчи[6].
В своих естественнонаучных трудах «Части движения и перемещение животных», Аристотель заложил основу того, что в дальнейшем, спустя 2300 лет назовут наукой биомеханикой. В своих научных трактатах он свойственной ему мышлением описывает животный мир и закономерности движения животных и человека. Он писал о частях тела, необходимых для перемещения в пространстве (локомоции), о произвольных и непроизвольных движениях, о мотивации движений животных и человека, о сопротивлении окружающей среды, о цикличности ходьбы и бега, о способности живых существ приводить себя в движение…
Величайшим ученым-медиком античного времени (после Гиппократа) был Клавдий Гален (131—201 гг. н. э.). В соответствии с мировоззрением античного времени, Гален понимал целостность организма. Он писал:
«В общей совокупности частей, все находится во взаимном согласии и … все содействует деятельности каждой из них».
Изучение нервов позволило Галену сделать вывод о том, что нервы по своей функциональной особенности делятся на три группы: те, что идут к органам чувств, выполняют функцию восприятия, идущие к мышцам ведают движением, а идущие к органам охраняют их от повреждения. Основной его труд — О назначении частей человеческого тела. Гален экспериментально показал, что конечность попеременно то сгибается внутренними, то разгибается наружными мышцами. Так, описывая пятую мышцу, самую большую, по его мнению, из всех мышц тела, приводящую бедро и состоящую из большой, средней и малой мышц, прикрепляющихся к внутренним и задним частям бедренной кости и нисходящей вниз почти до коленного сочленения, он, анализируя её функцию, писал:
«Задние волокна этой мышцы, идущие от седалищной кости, укрепляют ногу, напрягая сустав. Не менее сильно это действие производится нижней порцией волокон, идущих от лобковой кости, к чему присоединяется еще легкое вращательное движение внутрь. Выше их лежащие волокна приводят бедро внутрь точно так же, как самые верхние приводят и в то же время несколько поднимают бедро»
[7]. На развитие механики в средние века оказали существенное влияние исследования Леонардо да Винчи (1452—1519 г.) по теории механизмов, трению и другим вопросам. Изучая функции органов, он рассматривал организм как образец «природной механики». Впервые описал ряд костей и нервов, особое внимание уделял проблемам сравнительной анатомии, стремясь ввести экспериментальный метод и в биологию. Этот великий художник, математик, механик и инженер впервые высказал важнейшую для будущей биомеханики мысль:
«Наука механика потому столь благородна и полезна более всех прочих наук, что все живые тела, имеющие способность к движению, действуют по её законам».
Его успех как великого художника также немало зависит от биомеханической направленности его картин, — в них детально прорисована техника движения. Его наблюдения, очевидные в наши дни, в средние века были революционными. Например,
«Мускулы начинаются и оканчиваются всегда в соприкасающихся костях, и никогда они не начинаются и не оканчиваются на одной и той же кости, так как они ничего не могли бы двигать, разве только самих себя»
[8]. Леонардо, безусловно, является основоположником функциональной анатомии, составной части биомеханики. Он не только описал топографию мышц, но и значение каждой мышцы для движения тела.
Возникновение биомеханики как науки[править | править вики-текст]
Рисунок из книги Дж. Борелли De motu animalium Система рычагов, схема прикрепления мышц при сгибании в суставе и при разгибании. Скелетно-мышечная схема двух человек, по-разному удерживающих различный груз.
Основателем науки биомеханики по праву считается Джованни Борелли, итальянский натуралист. Профессор университетов в Мессине (1649) и Пизе (1656). Помимо работ в области физики, астрономии и физиологии, он разрабатывал вопросы анатомии и физиологии с позиций математики и механики. Он показал, что движение конечностей и частей тела у человека и животных при поднятии тяжестей, ходьбе, беге, плавании можно объяснить принципами механики, впервые истолковал движение сердца как мышечное сокращение, изучая механику движения грудной клетки, установил пассивность расширения лёгких.
Наиболее известный труд ученого «Движение животных» («Dе Motu Animalium»). Его учение основано на твердых биомеханических принципах, в своей работе он описал принципы мускульного сокращения и впервые представил математические схемы движения. Он впервые использует биомеханическую модель для объяснения движения в биомеханической системе.
Новый толчок развития биомеханики был связан с изобретением метода кинофотосъемки движения человека. Французский физиолог, изобретатель и фотограф. Этьенн Марей(1830—1904) впервые применил кинофотосъемку для изучения движений человека. Так же впервые им был применен метод нанесения маркеров на тело человека — прототип будущей циклографии. Важной вехой в истории биомеханики явились исполненные Э. Майбриджем (1830—1904)(США) циклы фотографий, снятых несколькими камерами с разных точек зрения. Серия фотографий («Галопирующая лошадь», 1887), показала необычайную красоту пластики реальных движений. С тех пор кинофотосъемка применяется для анализа движений как один из основных методов биомеханики. Начало анализа движения человека было положено братьями Вебер (1836) в Германии. Первый трёхмерный математический анализ человеческой походки проведен Вильгельмом Брауном и его студентом Отто Фишером в 1891 году. Методология анализа ходьбы не изменилась по сегодняшний день. Кроме того, Браун и Фишер впервые изучили массу, объём и центр масс человеческого тела, (проведя исследования на трупах), и получили данные, которые длительно использовали как биомеханический стандарт. Ими был также предложен метод определения массы сегментов тела и его объёма, используя погружение частей тела в воду. Так были получены данные возрастных изменений центров масс. Исследования Брауна и Фишера положили начало новой эпохи биомеханики — биомеханики ходьбы, а период со второй половины XIX столетия стали называть столетием ходьбы.
Современный этап развития биомеханики[править | править вики-текст]
Создателем теоретической основы современной биомеханики — учения о двигательной деятельности человека и животных можно по праву считать Николая Александровича Бернштейна (1896—1966)[9]
Созданная Бернштейном теория многоуровневого управления движениями, в том числе локомоциями человека, положила начало развитию новых принципов понимания жизнедеятельности организма. Поставив в центр внимания проблему активности организма по отношению к среде, Бернштейн объединил биомеханику и нейрофизиологию в единую науку физиологию движений[10]. Понятие Н. А. Бернштейна о двигательной задаче как психической основе действий человека открыло пути изучения высших уровней сознания в двигательной деятельности человека. Подверглись подробной разработке вопросы формирования, строения и решения двигательной задачи. Эти вопросы стали рассматриваться в тесной связи со строением двигательного состава действия как системы движений[11]. Ряд работ Бернштейна посвящён изучению динамики мышечных сил и иннервационной структуры двигательных актов. Он внёс коренные усовершенствования в технику регистрации и анализа движений (кимоциклограмма, циклограмметрия). Некоторые идеи, высказанные Бернштейном в 30-х гг., предвосхитили основные положения кибернетики. Бернштейну принадлежит одна из первых чётких формулировок понятия обратной связи в физиологии, а также идея по-уровневой организации движений. В связи с недостаточностью понятия «рефлекторной дуги» для объяснения двигательных актов Бернштейн ввёл понятие «рефлекторного кольца», основанное на трактовке всей системы отношений организма со средой как непрерывного циклического процесса.
В 1926 г. Н. А. Бернштейном на основе исследований в биомеханической лаборатории Центрального института труда было издано «Общая биомеханика» как первая часть «Основ учения о движениях человека». Важно отметить, что в учебнике «Физиология человека»[12], изданном в 1946 г. (под ред. М. Е. Маршака), уже полностью представлено учение Н. А. Бернштейна о координации движений, без которого невозможно и представить современную биомеханику[13].
В последние десятилетия уникальные исследования биомеханики и нейрофизиологии нормальной походки и ходьбы больных с различными заболеваниями опорно-двигательной и нервной системы провел А. С. Витензон[14]. На основе этих исследований он выдвинул концепцию компенсации двигательных дефектов и регуляции мышечной деятельности при патологической ходьбе[15].
Примечания[править | править вики-текст]
↑ Показывать компактно
1. ↑ Клиническая биомеханика/Под ред. В. И. Филатова. — Л.: Медицина, 1980.— 200 с.
2. ↑ Гладков А. В., Черепанов Е. А. Клиническая биомеханика в диагностике патологии позвоночника. Хирургия позвоночника 1 / 2004 (c. 103—109) http://www.spinesurgery.ru/netcat_files/383/271/h_84c9202b01cf195304641c61c23fc703
3. ↑ Янсон Х. А. Биомеханика нижней конечности человека. — Рига: Зинатне, 1975. — 324 с.
4. ↑ Сироткина И. Е. Биомеханика между наукой и искусством // Вопросы истории естествознания и техники. — 2011. — № 1. — С. 46—70.
5. ↑ Биомеханика театральная // Энциклопедия «Кругосвет».
6. ↑ Александер Р. — Биомеханика. Перевод с англ. И-во: МИР, М., 1970, с. 5
7. ↑ Гален К. О назначении частей человеческого тела: Пер. с древнегреч. — М.: Медицина, 1971 кн. XV, гл. VIII;, с. 885
8. ↑ http://www.vinci.ru/3/tezaurus/9/index.html Леонардо да Винчи. Тетради по анатомии
9. ↑ В. Левин. Человек, разгадавший тайну живого движения. «Наука и жизнь» № 10, 2005 http://www.geneticsafety.orgwww.nkj.ru/archive/articles/2099/
10. ↑ Н. А. Бернштейн. Физиология движений и активность. М.: Наука, 1990. С. 373—392. http://flogiston.ru/library/bernstein
11. ↑ Донской Д. Д., Дмитриев С. В. Психосемантические механизмы управления двигательными действиями человека // Теория и практика физ. культуры. 1999, № 9, с. 2-6.
12. ↑ Маршак М. Е. Физиология человека.-М.: Медгиз,1946.-345с.
13. ↑ Донской Д. Д. Н. А. БЕРНШТЕИН И РАЗВИТИЕ ОТЕЧЕСТВЕННОЙ БИОМЕХАНИКИ Теория и практика физической культуры, 1996, № 11 http://lib.sportedu.ru/press/tpfk/1996n11/p4-9.htm
14. ↑ Витензон А. С. Закономерности нормальной и патологической ходьбы человека. — М.: ЦНИИПП, 1998. — С. 271. — ISBN 5-89853-006-1
15. ↑ Витензон А. С. От естественного к искусственному управлению локомоцией. — М.: ПБОЮЛ Т. М. Андреева, 2003. — С. 448. — ISBN 5-94982-004-5
См. также[править | править вики-текст]
· Бионика
· Биомедицина
Ссылки[править | править вики-текст]
· Биомеханика в России
=
http://ic.pics.livejournal.com/tol39/33684220/231241/231241_640.jpg

=
http://o.aolcdn.com/hss/storage/midas/57e933487a315f99484f98646fb20219/203757464/e3dbedd4-e805-4867-8438-1a6b921de4e2-lede.jpg
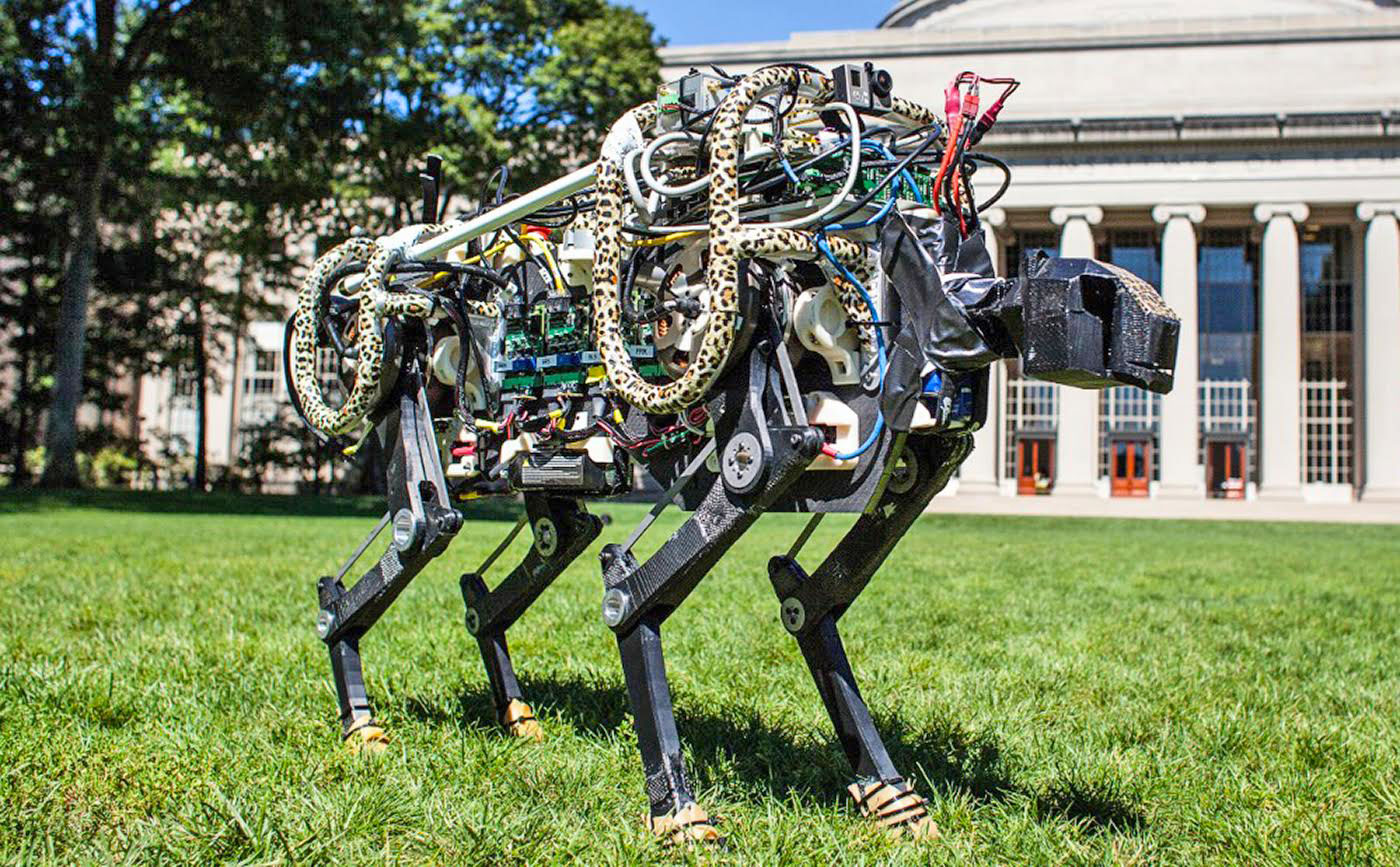
=
https://s-media-cache-ak0.pinimg.com/originals/8c/97/da/8c97da7f1b82f7cdc1c1f6a6786f5ca8.jpg

=
http://www.nunax.ru/uploads/images/roboj2.jpg


=
http://mobbit.info/media/5/Trionic_3.jpg

=
http://cyberclock.cc/forum/imagehosting/2011/04/30/2474dbb76d442279.jpg

=
http://www.facepla.net/images/stories2/391/Andrew_Chase/Steampunk-Sculpture-T-Rex-Rrrrr-by-Andrew-Chase.jpg

=
http://tbnews.org/wp-content/uploads/2014/11/ps_cheetah_boston_dynamics_1363093272.jpg
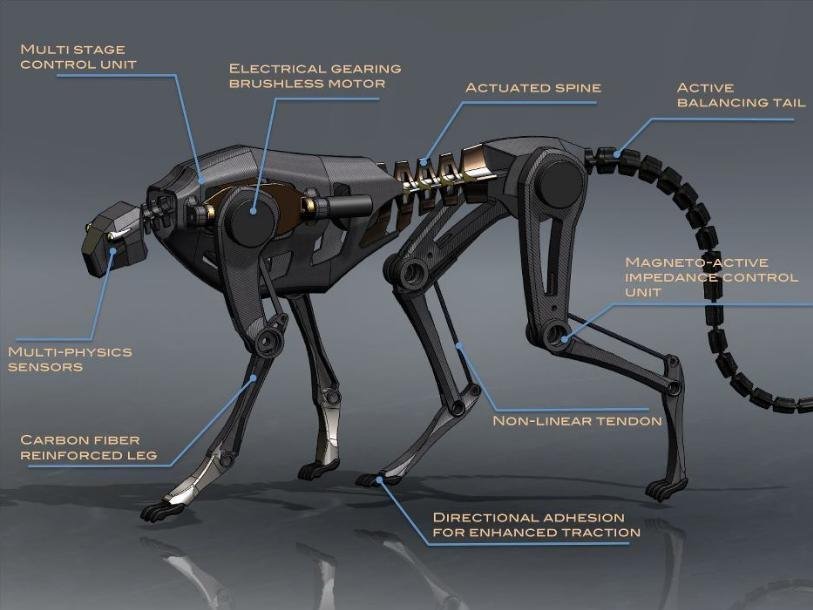
=
http://androbots.ru/roboty_budushego/Big_Dog/BigDog_ustroistvo.JPG
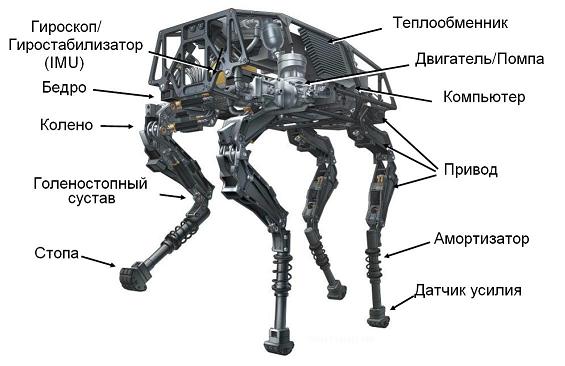
=
https://static.turbosquid.com/Preview/2014/07/10__05_24_24/BigDogMilitaryRobot_1.jpgc2216b82-822e-4c50-9257-fb6935397486Original.jpg
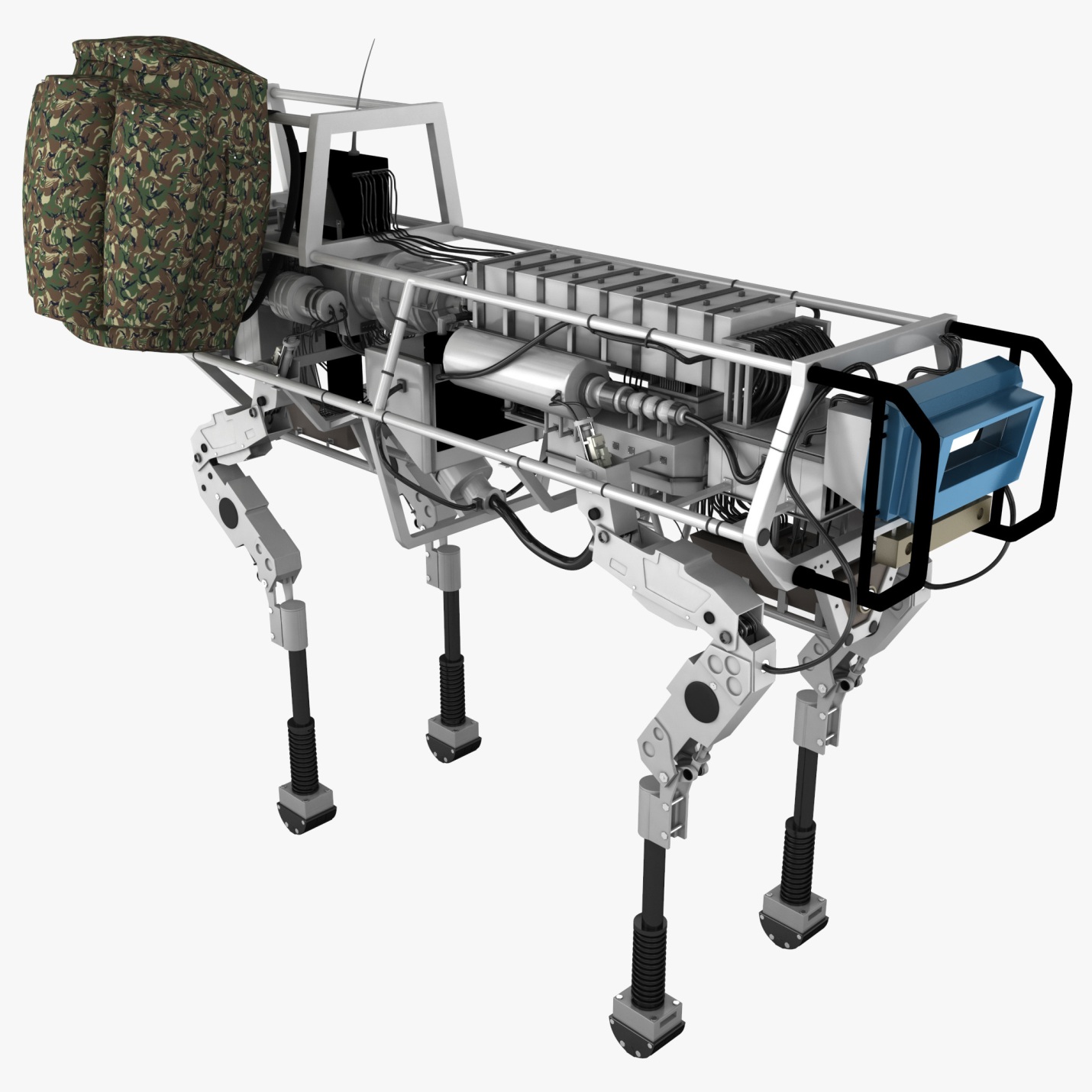
=
http://www.prorobot.ru/22/darpa_atl/robot-atlas.jpg

=
http://www.dailytechinfo.org/uploads/images2/20110418_4_3.jpg

=
http://insiderblogs.info/wp-content/uploads/2013/12/Boston-dynamics-google-BigDog_LS3.jpg
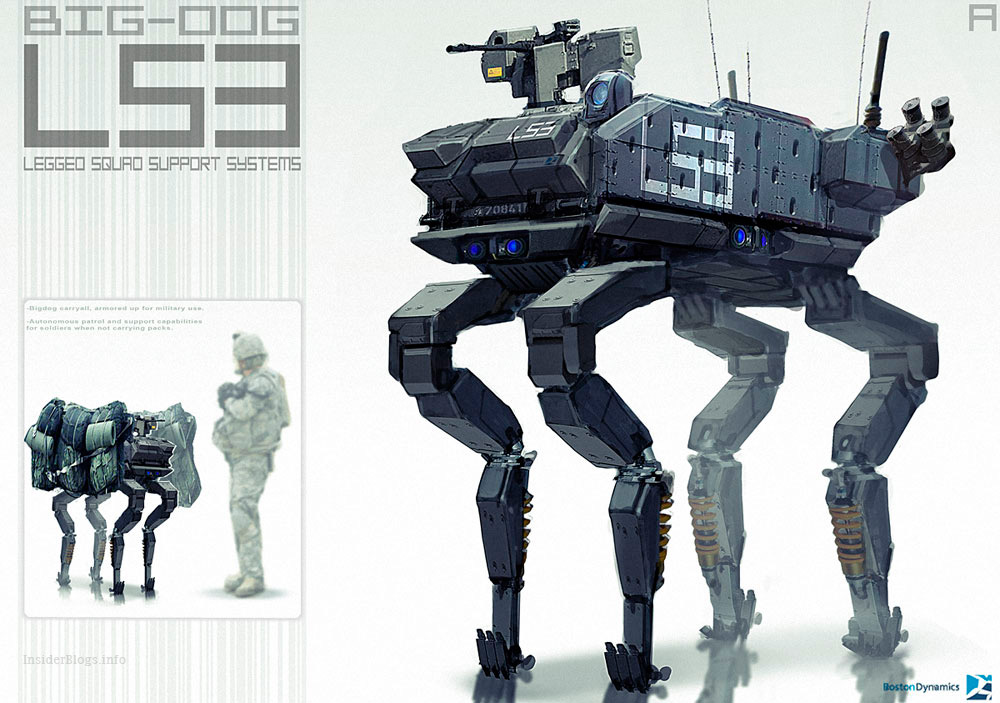
=
http://robomaniac.com.ua/images/1198_550.jpg

=
Евгений Никитин
Дата добавления: 2021-06-02; просмотров: 230; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!