Кинематические уравнения движения
ВВЕДЕНИЕ
Основная задача физики – это установление устойчивых связей между физическими величинами, измеренных с помощью приборов в принятых единицах.
Для построения системы физических единиц произвольно выбирают единицы для нескольких не зависящих друг от друга физических величин. Эти единицы называются основными. Остальные же величины и их единицы выводятся из законов, связывающих эти величины и их единицы с основными. Они называются производными.
Мы будем использовать систему физических единиц интернациональную (система СИ).
В СИ выбраны семь величин (длина, масса, время, сила тока, температура, количество вещества, сила света) и для них установлены основные единицы измерения физических величин: метр, килограмм, секунда, ампер, кельвин, моль, кандела.
В механике мы будем использовать пять основных единиц:
Масса - килограмм (кг) - масса, равная массе международного прототипа килограмма (платиноиридиевого цилиндра, хранящегося в Международном бюро мер и весов в Севре, близ Парижа).
Длина пути - метр (м) - длина пути, проходимая светом в вакууме за 1/299792458 с.
Время - секунда (с) - время, равное 9.192  109 периодам излучения, возникающего между уровнями основного состояния атомов Cs-133 .
109 периодам излучения, возникающего между уровнями основного состояния атомов Cs-133 .
Радиан (рад) - угол между двумя радиусами окружности, длина дуги между которыми равна радиусу.
Стерадиан (ср) - телесный угол с вершиной в центре сферы, вырезающий на поверхности сферы площадь, равную площади квадрата со стороной, равной радиусу сферы.
|
|
|
Пример производной единицы измерения скорости: из формулы равномерного прямолинейного движения V = s / t единица скорости получается равной 1 м/с (здесь V - скорость, s - пройденный путь, t - время).
Используемые в физике величины бывают двух видов:
Скаляр - величина, характеризуемая числовым значением (она может быть положительной и отрицательной).
Вектор - величина, характеризуемая как числовым значением (модуль вектора, положительное число), так и направлением.
МЕХАНИКА
Механика - раздел физики, изучающий закономерности механического движения.
Механическое движение - это изменение с течением времени взаимного расположения тел или их частей.
Классическая механика (механика Ньютона) - изучает законы движения макроскопических тел, скорости которых малы по сравнению со скоростью света в вакууме (с ≈ 3 108 м/с).
Релятивистская механика - изучает законы движения макроскопических тел со скоростями, сравнимыми со скоростью света в вакууме.
Квантовая механика - изучает законы движения микроскопических тел (отдельных атомов, элементарных частиц)
Классическая механика делится на три раздела:
|
|
|
Кинематика - изучает движение тел, не рассматривая причины этого движения.
Динамика - изучает причины движения тел.
Статика - изучает законы равновесия системы тел.
КЛАССИЧЕСКАЯ МЕХАНИКА
Кинематика материальной точки
Материальная точка - тело, обладающее массой, размерами которого в данной задаче можно пренебречь.
Произвольное макроскопическое тело или систему тел можно условно разбить на малые части, каждая из которых рассматривается как материальная точка, а изучение произвольной системы сводится к изучению системы материальных точек.
Кинематические уравнения движения
Движение тела происходит в пространстве и во времени.
Положение материальной точки определяется в система отсчета - совокупность системы координат и часов.
Мы будем использовать декартову систему координат, в которой положение точки в данный момент времени задается тремя координатами x, y, z или радиусом-вектором  , проведенным из начала системы координат в данную точку (см. рис. 1).
, проведенным из начала системы координат в данную точку (см. рис. 1).

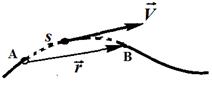
Рис. 1. Рис. 2.
При движении материальной точки ее координаты с течением времени изменяются и ее движение определяется либо скалярными кинематическими уравнениями движения
|
|
|
x = x(t), y = y(t), z = z(t),
либо векторными кинематическим уравнением движения  .
.
Исключая в этих уравнений время, получим уравнение траектории - линии, описываемой материальной точкой в пространстве.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
Плоская траектория – если она располагается в одной плоскости.
Мы будем рассматривать только плоские траектории.
Длина пути s – это длина участка траектории, пройденного материальной точкой с момента начала движения (на рис. 2 она показана пунктиром), она является скалярной функцией времени s(t).
ds – бесконечно малый путь. Единица измерения пути [s, ds] = [м].
Перемещение  - это вектор, проведенный из начального положения движущейся точки в положение ее в данный момент времени.
- это вектор, проведенный из начального положения движущейся точки в положение ее в данный момент времени.
Модуль перемещения: | | = r, dr – бесконечно малое перемещение.
Единица измерения перемещения [r, dr] = [м]
При прямолинейном движении модуль перемещения r равен пройденному пути s.
1.2. Скорость
Скорость  - это векторная величина,характеризующая как быстроту движения, так и его направление в данный момент времени.
- это векторная величина,характеризующая как быстроту движения, так и его направление в данный момент времени.
Мгновенная скорость (скорость в данный момент времени) 
|
|
|
и вектор мгновенной скорости направлен по касательной к траектории в сторону движения (для прямолинейного движения вектора и сонаправлены).
Модуль мгновенной скорости  . Единица измерения скорости [V] = [м/с].
. Единица измерения скорости [V] = [м/с].
Для равномерного движения (V = const) V = s/t, где s – путь, пройденный за время t.
При неравномерном движении вводится скалярная величина - средняя скорость <V> = Ds/Dt, где  – длина пути, пройденного материальной точкой за время
– длина пути, пройденного материальной точкой за время  , si – длина пути, пройденного материальной точкой за время t i
, si – длина пути, пройденного материальной точкой за время t i
Правило сложения скоростей: если система отсчета 1, в которой движется тело с постоянной скоростью V1, сама движется относительно системы отсчета 2 со скоростью V2, то скорость тела относительно системы отсчета 2 равна векторной сумме векторов V1 и V2.
Ускорение
Ускорение  - векторная величина, характеризующая быстроту изменения скорости по модулю и направлению. Мгновенное ускорение
- векторная величина, характеризующая быстроту изменения скорости по модулю и направлению. Мгновенное ускорение  .
.
При ускоренном прямолинейном движении вектора скорости и ускорения сонаправлены, при замедленном прямолинейном движении эти вектора противонаправлены.
При криволинейном движении точки вектор ускорения отклонен от касательной к траектории в сторону ее вогнутости: при ускоренном движении угол между векторами скорости и ускорения острый, а при замедленном движении – тупой (рис. 3).


Рис. 3 Рис. 4.
Модуль ускорения  , единица измерения [a] = [м/с2].
, единица измерения [a] = [м/с2].
Для равноускоренного движения:  ,
,
где Vо и V – скорости в начальный и конечный момент движения, t – время движения.
Для плоской траектории можно выделить два направления – касательную к траектории (орт  ) и главную нормаль (орт
) и главную нормаль (орт  ). Тогда вектор можно разложить на два вектора, направленных вдоль этих направлений:
). Тогда вектор можно разложить на два вектора, направленных вдоль этих направлений:
Вектор  называется тангенциальным (касательным) ускорением, он направлена по касательной к траектории (как и скорость) и характеризует быстроту изменения скорости по модулю. При ускоренном движении вектор сонаправлен с вектором скорости, а при замедленном движении эти векторы противонаправлены (рис. 4).
называется тангенциальным (касательным) ускорением, он направлена по касательной к траектории (как и скорость) и характеризует быстроту изменения скорости по модулю. При ускоренном движении вектор сонаправлен с вектором скорости, а при замедленном движении эти векторы противонаправлены (рис. 4).
Вектор  называется нормальным (центростремительным) ускорением, он направлена по нормали к траектории к центру кривизны траектории и характеризует быстроту изменения скорости по направлению
называется нормальным (центростремительным) ускорением, он направлена по нормали к траектории к центру кривизны траектории и характеризует быстроту изменения скорости по направлению  , здесь r – радиус кривизны траектории (если траектория окружность, то r – радиус окружности). Естественно
, здесь r – радиус кривизны траектории (если траектория окружность, то r – радиус окружности). Естественно  .
.
Правило сложения ускорений
Если тело движется с постоянным ускорением а1 в системе отсчета 1, а система 1 движется с постоянной скоростью относительно системы 2, то ускорение тела относительно системы отсчета 2 равна а1.
Виды движения
В зависимости от величин a t и an может быть девять видов движения.
Наиболее важные виды движения:
1.4.1. Прямолинейное равномерное движение: a t = 0, an = 0,
кинематическое уравнение движения s = Vt, V = s / t
s – путь, пройденный за время t.
1.4.2. Прямолинейное равноускоренное (равнозамедленное) движение: a = const, an= 0, кинематические уравнения движения
V = V o ± at, 
здесь Vo - скорость в начальный момент времени, V – скорость в момент времени t, s – пройденный путь, t – время движения.
1.4.3. Равномерное движение по окружности: a t = 0, an = сonst
(хотя an = сonst, но направление вектора изменяется, т.е. это ускоренное движение).
Угловая скорость есть векторная величина, модуль которой  (здесь d j - бесконечно малый угол поворота материальной точки за бесконечно малый промежуток времени dt).
(здесь d j - бесконечно малый угол поворота материальной точки за бесконечно малый промежуток времени dt).
Вектор  направлен вдоль оси вращения по правилу правого винта (рис. 5).
направлен вдоль оси вращения по правилу правого винта (рис. 5).


Рис. 5. Рис. 6.
Единица измерения угловой скорости [ω] = [рад/с] .
Период вращения Т – время одного полного оборота.
Частота вращения ν – число оборотов за 1 секунду, единица измерения частоты [ν, ω] =[c-1] = [Гц].
Имеет место соотношения:  .
.
Для равномерного движения по окружности w = const
и кинематическое уравнение j = wt.
1.4.4. Равноускоренное движение по окружности: a t = const, an = сonst;
Угловое ускорение − векторная величина, модуль которой  ,
,
причем вектор углового ускорения cонаправлен вектору угловой скорости при ускоренном движении и противонаправлен ему при замедленном движении (рис. 6).
Единица измерения [ε] = [рад/с2].
Кинематические уравнения равнопеременного движения по окружности: ω = ωo ± εt,  ,
,
где wo - начальная угловая скорость.
Связь между линейными и угловыми величинами: 
1.5. Тело, брошенное под углом α к горизонту с начальной скоростью Vo [Для самостоятельной работы]

 ;
; 
 ,
, 
Vx = Vocosα, V x не зависит от t,
Vy = Vosinα – gt = Voy – gt, ввершине параболы Vy = 0,
 ,
, 
в точке падения скорость тела равна по абсолютной величине скорости тела в точке бросания, а направление ее составляет тот же угол, что и в точке бросания (взятый с противоположным знаком);
время подъема (= времени падения)  ,
,  ,
,
 , .
, .
Тело, брошенное горизонтально, будет двигаться по одной из ветвей параболы с вершиной в точке бросания.
Дата добавления: 2019-02-26; просмотров: 3158; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!