СТРУКТУРА ПРОГРАММЫ ДЛЯ МОДЕЛИРОВАНИЯ МЕХАНИЗМА 3-ГО КЛАССА
Реализация алгоритма моделирования механизма 3-го класса осуществлена в программе, приведенной в приложении Д. Программа имеет следующую структуру. После имени программы приводится перечень используемых модулей: стандартных Crt, Graph и модуля Mpf0. tpu. Последний содержит следующие процедуры:
Procedure Kr (xo, yo, loa, fioag, q : Real; var xa, ya : Real);
Procedure As1 (xa, ya, xc, yc, lab, lcb, j, q : Real; var fiabg, ficbg : Real);
Procedure As2 (xa, ya, xn, yn, fing, l, lab, h, lcc, j, q : Real; var fiabg : Real);
Procedure As3 (xa, ya, xb, yb, h1, h2, lcc, q : Real; var fikg : Real);
Procedure As4 (xn, yn, fing, hn, xm, ym, fimg, hm, ldiag, q : Real; var xk, yk : Real);
Procedure As5 (xa, ya, h, xn, yn, fing, alfag, ldiag, q : Real; var xk, yk : Real);
Procedure Zveno (x, y, fig, l,q : Real);
Procedure Zveno_ (x, y, x1, y1, q : Real);
Procedure Opora (x, y, l, q : Real; ori : Integer);
Procedure Poi (xa, ya, fiabg, las, alfasg, q : Real; r : Integer; var xs, ys : Real);
Заметим, что процедуры для расчета ПФ элементов структурных групп Ассура 2-го класса с целью упрощения обращения к ним являются укороченными, то есть позволяют определить только ПФ0 элементов группы, так как ПФ1 и Пф2 фиктивного и действительного механизма не одинаковы.
Процедура Zveno служит для отрисовки на экране звена при известных значениях координат одной из его крайних точек, угла, определяющего положение его оси, а также его длине. Процедура Zveno_ служит для отрисовки звена по координатам крайних точек.
Рассмотрим структуру процедуры Mech, приведенной в приложении Д и разработанной для фиктивного механизма, представленного на рис. 9.5. Входным параметром этой процедуры является угол фиктивного кривошипа j AB. Сначала с помощью процедуры Kr определяем координаты xB и yB точки B фиктивного кривошипа. Далее с помощью процедуры As2 определяем угол j BC и, дважды используя процедуру Poi, определяем координаты точек E и C.
|
|
|
С помощью процедур Zveno и Zveno_ проводим отрисовку отрезков BE, BC, CD и EC.
Процедура Opora служит для отрисовки опор О и D.
Функция С F служит для расчета целевой функции, определяемой по формуле (9.11). При этом координаты точек D и C определяют с помощью процедуры Mech по величине входного параметра j AB.
Далее в приложении Д приводится тело программы, начинающееся оператором Begin и заканчивающееся оператором End с точкой.
Тело программы содержит процедуру InitG, служащую для инициализации графики и содержащуюся в модуле MPF0.
Далее следует задание численных значений параметров механизма и цикл, включающий определение оптимального значения j AB для каждого положения кривошипа, определяемого углом j OA.
Определение оптимального значения j AB выполняет функция Find, которая основана на методе половинного деления и приведена в приложении E. При этом отрисовка звеньев механизма не обязательна, поэтому q=0. Иногда при отладке программы приходится выполнять отрисовку механизма в процессе оптимизации, и тогда q=1. Далее с помощью процедур Kr и Mech определяются координаты элементов механизма и выполняется его отрисовка.
|
|
|
Заметим, что рассмотренная программа служит только для получения движущейся модели механизма и не формирует массивы ПФ0 элементов механизма.
В приложении Ж приведена программа для моделирования механизма чушколомателя для схемы фиктивного механизма, представленного на рис. 9.6. При этом направляющая ползуна принята горизонтальной, и целевая функция принимает вид
СF = yN – yE.
В приложении И приведена программа для моделирования механизма чушколомателя для схемы фиктивного механизма, представленного на рис. 9.5. Тогда в качестве начального звена фиктивного механизма принят ползун 4. Рассмотренные программы могут быть использованы не только для получения движущегося изображения механизма выше второго класса, но и для определения ПФ0 элементов механизма. Для этого необходимо только изменить тип выходных параметров и сформировать их массивы, которые и представляют собой передаточные функции нулевого порядка.
ОПРЕДЕЛЕНИЕ ПФ1 И ПФ2 ЭЛЕМЕНТОВ МЕХАНИЗМОВ ВЫШЕ ВТОРОГО КЛАССА
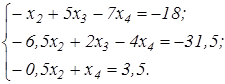
После определения координат и углов звеньев для достаточного количества положений начального звена (например, 48) можно определить ПФ1 и ПФ2 этих точек и звеньев, продифференцировав систему уравнений (9.1) по обобщенной координате (углу поворота кривошипа j1). Получим систему линейных уравнений для определения ПФ1 точек В, С и Е:
|
|
|
 (11.1)
(11.1)
Последнее из этих шести уравнений записано в предположении, что направляющая ползуна неподвижна.
Эта система уравнений содержит шесть неизвестных ПФ1 внутренних кинематических пар:  ,
,  ,
,  ,
,  ,
,  ,
,  . Таким образом, эта система уравнений является линейной и может быть решена, например методом Гаусса. Рассмотрим идею этого метода на примере решения системы четырех уравнений с четырьмя неизвестными.
. Таким образом, эта система уравнений является линейной и может быть решена, например методом Гаусса. Рассмотрим идею этого метода на примере решения системы четырех уравнений с четырьмя неизвестными.

 (11.2)
(11.2)
Разделим коэффициенты первого уравнения системы (а) на коэффициент при х1 – 2:
 .
.
Используя это уравнение, можно исключить из системы (11.2) неизвестную х1. Для этого полученное уравнение умножаем на коэффициент при х1 в уравнении (b) и вычитаем из этого уравнения. То же самое выполняем для уравнений (с) и (d):

Тогда получим систему трех уравнений с тремя неизвестными
 (11.3)
(11.3)
Далее из системы (11.3) исключаем неизвестную х2:
|
|
|

Получим
 (11.4)
(11.4)
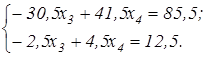
Теперь из системы (11.4) исключаем неизвестную х3. Для этого первое уравнение делим на коэффициент -30,5:
 .
.
Умножаем это уравнение на коэффициент при х3 во втором уравнении и вычитаем из него полученное выражение:
-2,5х3+4,5х4+2,5(х3 –1,3606х4)=12,5-2,8033×2,5;
х4=5.
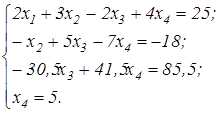
Таким образом, процесс решения линейной системы по методу Гаусса сводится к построению системы, имеющей треугольную матрицу:
 (11.5)
(11.5)
Процесс получения эквивалентной системы (11.5) называется прямым ходом. Затем выполняется обратный ход, в результате которого из уравнений (с), (b) и (а) последовательно определяют х3, х2 и х1.
Для определения ПФ2 точек В, С и Е следует продифференцировать систему линейных уравнений (11.1):
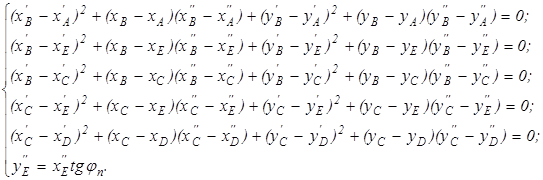 (11.6)
(11.6)
Эта система линейных уравнений содержит шесть неизвестных  ,
,  ,
,  ,
,  ,
,  ,
,  и может быть также решена методом Гаусса.
и может быть также решена методом Гаусса.
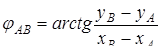
Рассмотрим методику определения угловых ПФ звеньев. На рис. 11.1 представлены схемы звеньев, для которых известными являются  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , , .
, , .
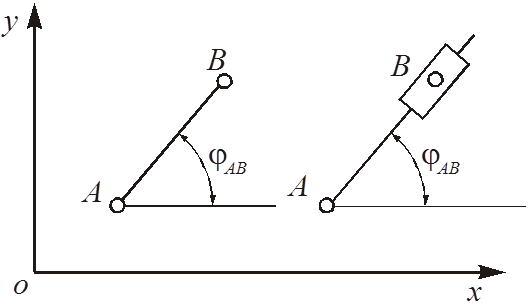
Рисунок 11.1 – Схемы звеньев механизма
Тогда
 . (11.7)
. (11.7)
Кроме того
 , (11.8)
, (11.8)
 (11.9)
(11.9)
Для определения угловой ПФ1 звеньев продифференцируем выражение (11.8) и получим
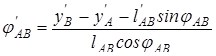 , (11.10)
, (11.10)
где
 . (11.11)
. (11.11)
Дважды продифференцировав выражение (11.8), получим
 , (11.12)
, (11.12)
где
 (11.13)
(11.13)
Для определения угловых ПФ предназначена процедура UPF. Её описание:
UPF ( Xa, Ya, Xa_1, Ya_1, Xa_2, Ya_2, {входные параметры}
Xb, Yb, Xb_1, Yb_1, Xb_2, Yb_2 : Real;
var Fiabg, Fiab_1, Fiab_2 : Real). {выходные параметры}
Дата добавления: 2018-10-26; просмотров: 229; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!