Приведение структурной схемы к рабочему виду
Nbsp; МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ВЯТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Факультет автоматики и вычислительной техники
Кафедра автоматики и телемеханики
КУРСОВАЯ РАБОТА
по дисциплине
«Теория автоматического управления»
на тему
«Расчет динамической системы автоматического управления
с заданными показателями качества»
ТПЖА 220421.016.001 ПЗ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Разработал студент гр. У-31 _______________ /./
(подпись)
Руководитель к.т.н., доцент __________________ /./
(подпись)
Проект защищен с оценкой «_____________» «__»_______ 201 г.
Члены комиссии _____________________ /_________________/ (подпись)
_____________________ /_________________/
(подпись)
Киров 201
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РФ
ВЯТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Факультет автоматики и вычислительной техники
Кафедра автоматики и телемеханики
Задание на курсовую работу студента гр. У-31
Ф.И.О.
Вариант № 16
1. Тема работы:
Расчет динамической системы автоматического управления с заданными показателями качества.
2. Исходные данные к работе:
Структурная схема системы управления:

Параметры системы управления:

Значения параметров системы:
K1=120, K2=8, K3=1, T2=0.02, T3=1.3, tp=1.0 c, σ =10%.
|
|
|
3. Пояснительная записка:
3.1. Введение.
3.2. Приведение структурной схемы к стандартному виду.
3.3. Построение ЛАЧХ исходной, желаемой систем и устройства коррекции.
3.4. Техническая реализация аналогового корректирующего устройства.
3.5. Построение передаточной характеристики скорректированной системы.
3.6. Реализация передаточной функции и алгоритма работы ЭВМ как дискретного корректирующего устройства.
3.7. Получение дискретных передаточных функций цифровой системы.
3.8. Построение передаточной характеристики дискретной системы.
3.9. Заключение.
3.10. Приложения.
4. Оформление пояснительной записки и чертежей ведется согласно ЕСКД и ГОСТов.
5. Дата выдачи задания: . .201. Руководитель___________(подпись)
6. Дата получения задания: . .201. Студент________________(подпись)
РЕФЕРАТ
Ф.И.О. Расчет динамической системы автоматического управления с заданными показателями качества. ТПЖА 220421.016.001 ПЗ: Курсовая работа / ВятГУ, каф. АТ; рук. Семеновых В.И.. - Киров, 201. ПЗ 27., 17 рис., 5 источников.
Z – ПРЕОБРАЗОВАНИЕ, АНАЛОГОВЫЙ ФИЛЬТР, ВРЕМЯ РЕГУЛИРОВАНИЯ, ДИНАМИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ, ДИСКРЕТНЫЙ ФИЛЬТР, ДИФФЕРЕНЦИАТОР, ЖЕЛАЕМАЯ СИСТЕМА, ЗАМКНУТАЯ СИСТЕМА, ИНТЕГРАТОР, КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО, ЛОГАРИФМИЧЕСКАЯ АМПЛИТУДНО–ЧАСТОТНАЯ ХАРАКТЕРИСТИКА, МАКСИМАЛЬНОЕ ПЕРЕРЕГУЛИРОВАНИЕ, ОШИБКА СИСТЕМЫ, ПЕРЕДАТОЧНАЯ ФУНКЦИЯ, ПЕРЕХОДНАЯ ФУНКЦИЯ, ПЕРЕХОДНЫЙ ПРОЦЕСС, ПРЕОБРАЗОВАНИЕ ЛАПЛАСА, РАЗОМКНУТАЯ СИСТЕМА, СТРУКТУРНАЯ СХЕМА, ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА, ЧАСТОТА СРЕЗА., ЭКСТРАПОЛЯТОР.
|
|
|
Объект исследования – следящая система с асинхронным двухфазным двигателем.
Цель работы – освоить методы расчета систем управления, соответствующих заданным значениям качественных показателей, получения и анализа основных их характеристик и параметров, синтеза корректирующих устройств.
Оглавление
| Оглавление | 4 |
| 1. Введение | 5 |
| 2. Синтез линейной непрерывной части системы управления | 6 |
| 2.1 Преобразование исходной схемы к стандартному виду | 6 |
| 2.2 Построение ЛАХ исходной САУ | 8 |
| 2.3 Построение желаемой ЛАХ САУ | 11 |
| 2.4 Техническая реализация аналогового корректирующего устройства | 14 |
| 2.5 Передаточная функция разомкнутой САУ | 19 |
| 2.6 Передаточная функция замкнутой САУ | 19 |
| 2.7 Построение переходного процесса | 19 |
| 3. Синтез дискретной системы | 21 |
| 3.1 Дискретная передаточная функция непрерывной части | 21 |
| 3.2 Дискретная передаточная функция корректирующего звена | 21 |
| 3.3 Дискретная передаточная функция замкнутой системы | 22 |
| 3.4 Исследование устойчивости | 22 |
| 3.5 Построение переходного процесса | 24 |
| Заключение | 26 |
| Приложение А (справочное). Библиографический список литературы | 27 |
|
|
|
Введение
Для того чтобы различные технические устройства и системы выполняли требуемые функции, необходимо организвать тот или иной процесс управления. Процесс управления может быть реализован «ручным» способом или с помощью совокупности технических средств, которые, вобщем случае, называют системами автоматического управления. Теория управления является в настоящее время одной из важнейших технических наук общего применения. Она даёт основную теоретическую базу для исследования и проектирования любых автоматических и автоматизированных систем во всех областях техники и деятельности человека.
Теория автоматического управления и регулирования изучает процессы управления, методы их исследования и основы проектирования автоматических систем и входит в науку под общим названием кибернетика.
Теория управления прошла значительный путь своего развития. На начальном этапе были созданы методы анализа устойчивости, качества и точности регулирования непрерывных линейных систем. Затем получили развитие методы анализа дискретных и дискретно-непрерывных систем. Можно отметить, что способы расчёта непрерывных систем базируются на частотных методах, а расчёта дискретных и дискертно-непрерывных – на методах z-перобразования.
|
|
|
В настоящее время развиваются методы анализа нелинейных систем автоматического управления. Нарушения принципа суперпозиции в нелинейных системах, наличие целого ряда чередующихся, в зависимости от воздействия, режимов устойчивого, неустойчивого движений и автоколебаний затрудняют их анализ. Ещё с большими трудностями встречается проектировщик при расчёте экстремальных и самонастраивающихся систем регулирования.
Дальнейшее развитие методы синтеза получили на основе принципов максимума и динамического программирования, когда оперделяется оптимальный с точки зрения заданного критерия качества закон регулирования. Оптимальный закон характеризует верхний предел качества системы, к которому можно стремиться при её проектировании.
Метод пространства состояний в теории управления способствует совершенствованию методов проектирования сложных систем. Последнее требует значительного увеличения объёма перерабатываемой информации и более сложных методов формирования законов управления.
Синтез линейной непрерывной системы
Приведение структурной схемы к рабочему виду
Наряду с базовой структурной схемой нам будет необходима другая, которую мы примем за рабочую, она имеет вид:
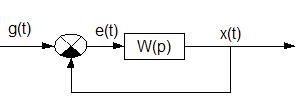
Рис. 1. Рабочая структурная схема
Где W(p) передаточная функция разомкнутой системы. Переход от структурной схемы к рабочей осуществляется путем применения правил структурных преобразований.
Рис. 2. Исходная структурная схема
Рассматриваем разомкнутую систему:
 Рис. 3. Разомкнутая исходная схема
Рис. 3. Разомкнутая исходная схема


Рабочая структурная схема системы и каноническая запись передаточной функции разомкнутой системы является исходными для дальнейших расчётов частотным методом.
Корни характеристического полинома: p1= -50; p2= -0.76923; p3= 0.
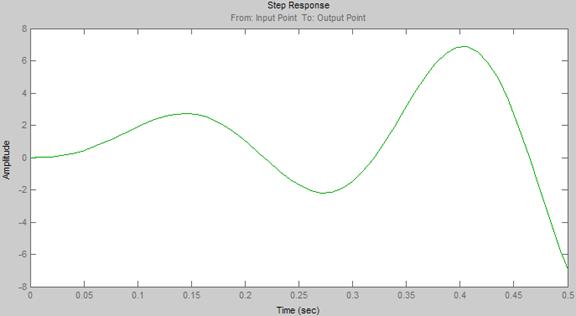
Рис.4. Вид переходного процесса в исходной (нескорректированной) замкнутой системе
2.2 Построение ЛАХ исходной САУ
По каноническому виду передаточной функции можно определить примерный вид логарифмической амплитудно-частотной характеристики.
Найдем коэффициент усиления и постоянные времени из выражения для передаточной функции разомкнутой системы:
Найдем сопрягающиеся частоты из соотношения  :
:
Определим коэффициент усиления на частоте  :
:

Прежде чем заниматься построением следует выбрать и разместить систему координат. Здесь нужно иметь в виду следующее:
· по оси ординат разбивка идёт равномерно, в децибелах:
0 дБ, 20 дБ, 40 дБ и т.д. вверх и -20 дБ, -40 дБ, ... – вниз.
· по оси абсцисс разбивка идёт логарифмическая, но
оцифровка в обычном виде ...0.1 c-1, 1с-1, 10 с-1, 100 с-1 и т.д.
· начало оси координат рекомендуется поместить в точку, отстоящую на 2-3 декады влево от самой наименьшей сопрягающей частоты (которая соответствует максимальной постоянной времени в канонической записи передаточной функции разомкнутой системы).
· при построении фазовой характеристики ось абсцисс остаётся той же самой: ось ординат из начала системы координат направляется вниз, разбивка её равномерная в градусах(отрицательных): 0 град, -90 град, -180 град и т.д.
Подставим в передаточную функцию p = jω запишем её в виде:

Построение ЛАХ проводится следующим образом:
На частоте ω =1 c-1 откладываем значение 20lg(960)=60 дБ и через эту точку проводим прямую с наклоном  ,до частоты ω3= 0.769 c-1, соответсвующей звену
,до частоты ω3= 0.769 c-1, соответсвующей звену  . Далее проводим прямую с наклоном
. Далее проводим прямую с наклоном  до частоты ω2=50 c-1, соответствующей звену
до частоты ω2=50 c-1, соответствующей звену  . Затем прямая с наклоном
. Затем прямая с наклоном  .
.
Выполним построение ЛАЧХ по каноническому виду передаточной функции (см. рис. №3).
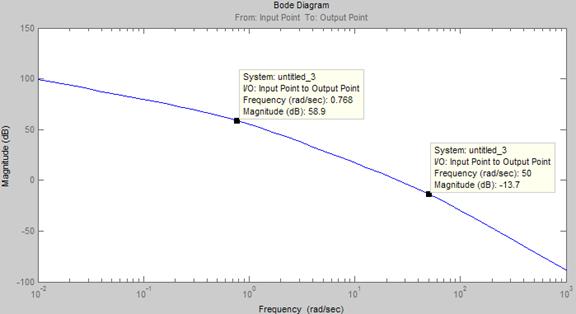
Рис. 5. Логарифмическая амплитудно-частотная характеристика нескорректированной САУ
Так как была найдена передаточная функция нескорректированной системы в канонической форме
 ,
,
то фазовая характеристика системы управления определяется при помощи формулы

Таким образом, получим:
 .
.
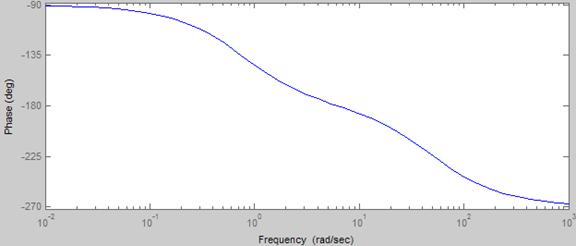
Рис. 6. Логарифмическая фазо-частотная характеристика нескорректированной САУ
2.3 Построение желаемой ЛАЧХ САУ
При постороении желаемой ЛАЧХ необходимо обратить внимание на следующие моменты:
· Низкочастотная часть ЖЛАХ должна проходить не ниже точки с координатами {w=1, L(w)=20lg(K)};
· Наклон ЛАЧХ в этой части должен быть таким же, как и ЛАЧХ исходной системы;
· Сопряжение среднечастотной части ЖЛАХ с низкочастотной её частью рекомендуется проводить прямой наклоном -40 дб/дек либо прямой, параллельной ЛАЧХ исходной системы, с учётом предыдущего замечания;
· Высокочастотную часть желаемой ЛАЧХ следует проводить параллельно ЛАЧХ исходной системы вплоть до сопряжения со средним участком.
Общая рекомендация при построении ЖЛАХ:
Желаемая ЛАЧХ должна как можно меньше отличаться от исходной ЛАЧХ, т.е. надо стремиться к тому, чтобы точки излома обеих ЛАЧХ совпадали. В связи с этим протяженность среднего участка можно увеличивать в обе стороны до первичных сопрягающих частот, а в низкочастотной и высокочастной частях ЖЛАХ должна проходить параллельно исходной (с учётом сделанных выше замечаний).
Исходя из выше сказанного получим:
Среднечастотная часть характеристики определяет запас устойчивости системы и однозначно связанное с ним перерегулирование d. Она проводится с наклоном
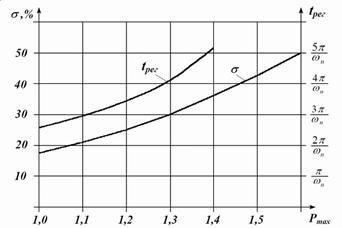 -20 дб/дек и пересекает ось абсцисс на частоте wcp=(0.6÷0.9)wп, которая в свою очередь зависит от перерегулирования d и определяется по номограмме Солодовникова(см. рис. 7). Т.к. в нашем случае d=10%, то придётся мысленно продлить оба графика. В итоге получим при d=10% wп=2.2π/tр. Подставляя заданное значение времени переходного процесса tр =1с, получим частоту среза wcp=(0.6÷0.9) ·2.2π/tр=6.217 (с-1). Среднечастотная часть продолжается в обе стороны от оси абсцисс до тех пор, пока её значение не достигнет Lуст., которое определяется по аналогичной справочной зависимости (см. рис. 8): Lуст.=35дб.
-20 дб/дек и пересекает ось абсцисс на частоте wcp=(0.6÷0.9)wп, которая в свою очередь зависит от перерегулирования d и определяется по номограмме Солодовникова(см. рис. 7). Т.к. в нашем случае d=10%, то придётся мысленно продлить оба графика. В итоге получим при d=10% wп=2.2π/tр. Подставляя заданное значение времени переходного процесса tр =1с, получим частоту среза wcp=(0.6÷0.9) ·2.2π/tр=6.217 (с-1). Среднечастотная часть продолжается в обе стороны от оси абсцисс до тех пор, пока её значение не достигнет Lуст., которое определяется по аналогичной справочной зависимости (см. рис. 8): Lуст.=35дб.
Рис. 7 Номограмма Солодовникова для выбора wcp.
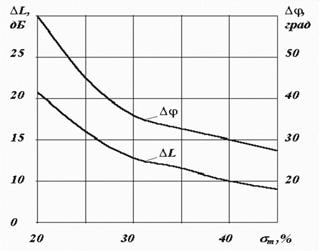
Рис. 8 Номограмма Солодовникова для избытка фазы γ и предельных значений L.
Резюмируя всё выше сказанное:
· Низкочастотная часть проводится с наклоном -20 дб/дек.
· Сопряжение низкочастотной и среднечастотной частей характеристики осуществляется асимптотой с наклоном -40 дб/дек на частоте w1
· Выскочастотная часть желаемой ЛАЧХ проводится с наклоном -60 дб/дек (таким же наклоном какой имеет высокочастотная асимптота ЛАЧХ) и сопрягается со среднечастотной частью на частоте w5.
Вычислять наклоны ЛАЧХ корректирующего устройства будем по формуле:
Lтреб=Lисх+Lкорр
Lкорр = Lтреб - Lисх
Данная формула получена исходя из свойства логарифмической функции:
lg(W1·W2)=lgW1+lgW2
ЛАЧХ корректирующего устройства имеет наклоны 0:-20:0:+20:+40:0 Дб/дек. Все характеристики строились для разомкнутой динамической системы управления.
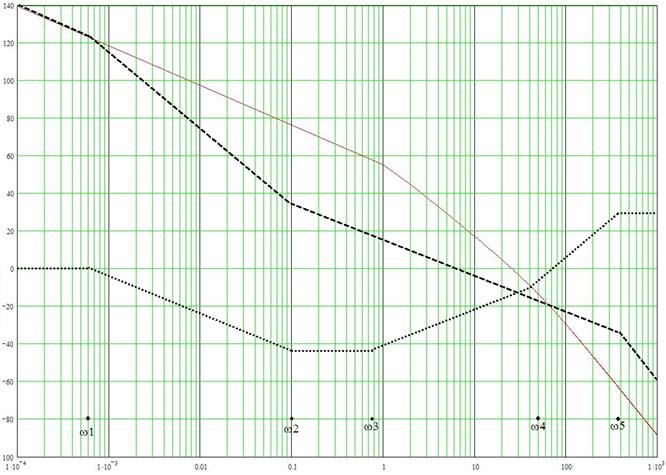
 - ЛАЧХ незамкнутой системы
- ЛАЧХ незамкнутой системы
 - ЖЛАЧХ
- ЖЛАЧХ
 - ЛАЧХ корректирующего звена
- ЛАЧХ корректирующего звена
Рис. 9. Графическое изображение ЛАЧХ, ЖЛАЧХ и ЛАЧХ корректирующего звена
ω1=0.0006(с-1); ω2=0.1(с-1); ω3=0.769(с-1); ω4=50(с-1); ω5=390(с-1).
 (с);
(с);  (с);
(с);  (с);
(с);
 (с);
(с);  (с);
(с);
2.4 Техническая реализация аналогового корректирующего устройства
ЛАЧХ корректирующего устройства получается как разность желаемой ЛАЧХ и ЛАЧХ исходной системы. При этом передаточная функция корректирующего устройства, определяемая по его ЛАЧХ имеет вид:
 Воспользовавшись графиком корректирующей ЛАЧХ синтезируем электронную схему корректирующего устройства (КУ). Схема КУ составлена из отдельных звеньев преобразовательных элементов – пассивных четырёхполюсников. В корректирующем устройстве между звеньями пассивных четырёхполюсников следует установить усилительные каскады. Они предназанчены для устранения затуханий, вносимых пассивными элементами звеньев КУ, и для устранения влияния одного четырёхполюсника на другой.
Воспользовавшись графиком корректирующей ЛАЧХ синтезируем электронную схему корректирующего устройства (КУ). Схема КУ составлена из отдельных звеньев преобразовательных элементов – пассивных четырёхполюсников. В корректирующем устройстве между звеньями пассивных четырёхполюсников следует установить усилительные каскады. Они предназанчены для устранения затуханий, вносимых пассивными элементами звеньев КУ, и для устранения влияния одного четырёхполюсника на другой.
Рассмотрим первое корректирующее звено - оно обеспечит излом на -20 дБ/дек.
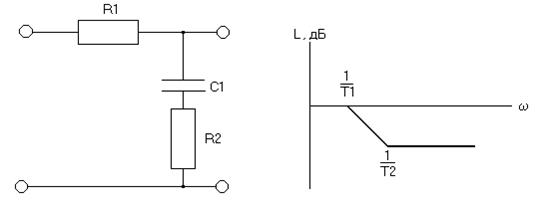
Рис. 10. Интегрирующее звено и его ЛАХ
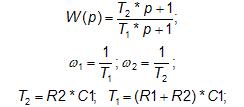 Рассчитаем параметры интегрирующего звена:
Рассчитаем параметры интегрирующего звена:
Интегратор имеет частоты изломов ЛАЧХ, равные w1 = 0.0006с-1;
w2=0.1 с-1. Выберем стандартный конденсатор С1 = 10 мФ, так как частоты изломов невелики.
Резисторы должны иметь следующие параметры:
R2 =  = 1 кОм;
= 1 кОм;
R1 =  – 1000= 166 кОм.
– 1000= 166 кОм.
Выберем стандартные значения R1 = 1 кОм, R2 = 166 кОм (из ряда Е96).
Рассмотрим второе корректирующее звено - оно обеспечит излом на +20 дб/дек.
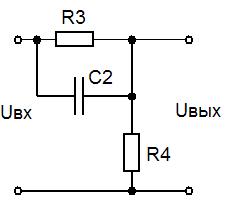

Рис. 11. Дифференцирующее звено и его ЛАХ
Для дифференцирующей цепи основные соотношения имеют такой вид:






Рассчитаем параметры элементов дифференциатора. Частоты изломов равны w3=0.769с-1; w5=390с-1. Выберем стандартный С2 = 1000 мкФ, так как частоты изломов невелики.
Резисторы должны иметь следующие параметры:
R3 =  = 1300 Ом=1.3 кОм
= 1300 Ом=1.3 кОм
R4 =  = 1000 Ом=1 кОм
= 1000 Ом=1 кОм
Выберем стандартные значения R3 = 1.3 кОм, R4 = 1 кОм (из ряда Е96).
Рассчитаем ещё один дифференциатор по аналогичной схеме.
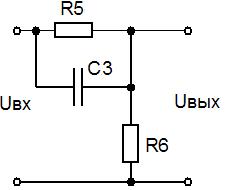
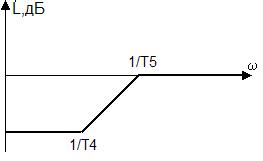
Рис. 12. Дифференцирующее звено и его ЛАХ



Частоты изломов равны w4=50с-1; w5=390с-1. Выберем стандартный
С3 = 10 мкФ. Резисторы должны иметь следующие параметры:
R5 =  = 20 Ом
= 20 Ом
R6 =  = 30 Ом
= 30 Ом
Выберем стандартные значения R5 = 20 Ом, R6 = 30 Ом (из ряда Е96).
Т.к. полученные значения соответствуют реальным номиналам элементов, то уточнение постоянных времени корректирующих цепей не требуется.
Для последовательного соединения пассивных звеньев необходимо минимизировать их взаимное влияние. Для этого обычно используют буферные неинвертирующие усилители с широкой полосой пропускания. Выберем интегральные операционные усилители, включенные по неинвертирующей схеме. Схема такого усилителя изображена на рис. 13. Резистор в цепи обратной связи выбирается для конкретного операционного усилителя. Для предотвращения ослабления сигнала необходимо подобрать усилители с таким коэффициентом усиления, чтобы K0·Ku≥1. Выбор типа операционного усилителя не входит в состав настоящей работы.
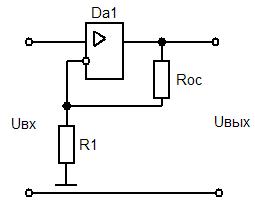
Рис. 13. Неинвертирующий усилитель
Для технической реализации корректирующего устройства потребуются последовательно соединенные интегратор и два дифференциатора. Итоговая схема корректирующего устройства, включающая усилители, изображена на рис. 14.
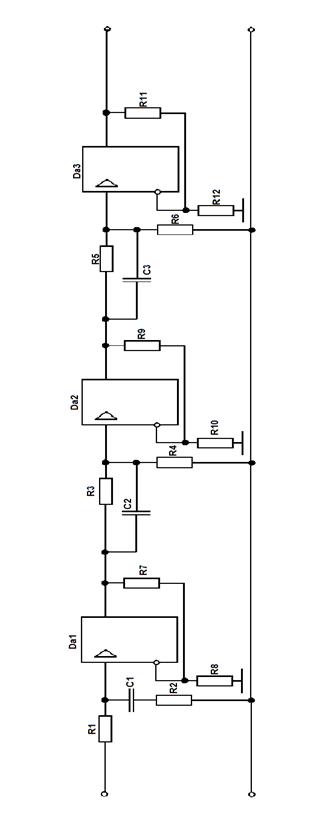
Рис. 14. Схема устройства корреции.
2.5 Передаточная функция разомкнутой САУ
Найдем передаточную функцию разомкнутой системы управления с учетом корректирующего устройства
2.6 Передаточная функция замкнутой САУ
Передаточная функция замкнутой системы определяется как

2.7 Построение переходного процесса
График переходного процесса в скорректированной системе изображен на
рис. 15.
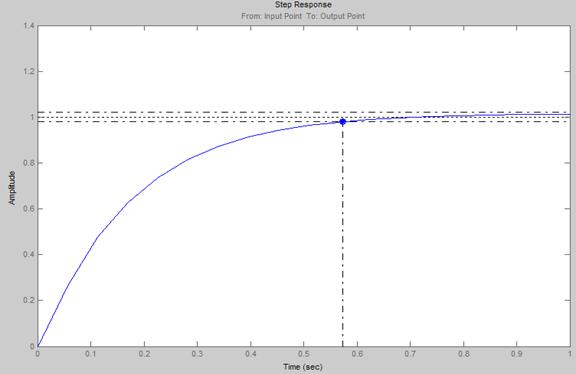 |
Рис. 15. График переходного процесса
Из графика переходного процесса можно определить некоторые параметры, определяющие качество процесса управления. Найдем:
tp = 0.57 c – время регулирования,

Техническое задание предусматривает максимальное время регулирования (время, за которое переходный процесс войдет в 5% зону отклонения от установившегося значения и уже не выйдет из нее после этого) равным 1.0 с. Таким образом, полученный параметр tр = 0.57 с соответствует техническому заданию.
Так же в задании оговаривается, что максимальная величина перерегулирования (доля амплитуды максимального выброса переходного процесса над установившимся значением от величины амплитуды установившегося режима системы управления) равна 10 %. Таким образом, полученный параметр  соответствует техническому заданию.
соответствует техническому заданию.
Таким образом, с помощью синтеза последовательного корректирующего устройства, была получена система управления с заданными характеристиками.
Синтез дискретной системы
Синтез дискретной системы
Задача ЦВМ заключается в обеспечении желаемых динамических характеристик системы управления посредством использования корректирующих программ в ЦВМ. В этом случае ЦВМ представляет собой по существу цифровой фильтр с заданными характеристиками.
Цифровые системы управления имеют квантование по времени, что относит их к классу дискретных (импульсных) систем, и квантование по уровню (в АЦП и ЦАП). Если разрядность входных и выходных преобразователей достаточно велика, то их нелинейностью можно пренебречь, при этом рассматривается линеаризованная дискретная система с учетом влияния, оказываемого квантованием по уровню, в виде дополнительного шума квантования, рассматриваемого как случайный процесс с равновероятным законом распределения.
При исследовании дискретных систем широкое использование получили методы теории решетчатых функций,  – преобразование,
– преобразование,  – преобразование.
– преобразование.
Дискретная линейная система может быть представлена в виде последовательного соединения импульсного элемента (ИЭ), экстраполятора, формирующего импульсы заданной формы с передаточной функцией Wэ(p) и непрерывной части (НЧ) с передаточной функцией Wн(p) (см. рис.14).

Рис. 16. Структура дискретной системы управления
Сигнал на входе экстраполятора рассматривается в дискретные моменты времени nT (n=0,1,2 ...), где Т - период дискретности. Хотя сигнал на выходе НЧ непрерывен, будем рассматривать его в эти же дискретные моменты времени.
Таким образом, дискретным фильтром называется устройство, которое получает входные сигналы и выдает выходные в дискретные моменты времени.
Изображения (z-преобразования) входной и выходной величин дискретного фильтра связаны между собой его дискретной передаточной функцией.
W(z) определяется как z–преобразование от приведенной весовой функции фильтра, которую можно найти как обратное преобразование Лапласа от передаточной функции приведенной непрерывной части Wп(р). Wп(р) находится как произведение передаточной функции непрерывной части и передаточной функции экстраполятора.
В цифровых системах используется экстраполятор нулевого порядка, формирующий прямоугольные импульсы длительностью Т и высотой, равной значению непрерывной функции в начале текущего периода дискретности. При этом  .
.
Тогда, согласно выше изложенному, имеем  .
.
3.1 Дискретная передаточная функция непрерывной части
Выберем период дискретизации при помощи теоремы Котельникова:
Произведем преобразование передаточной функции непрерывной части системы управления в импульсную, используя метод билинейного преобразования:


3.2 Дискретная передаточная функция корректирующего звена
Произведем преобразование передаточной функции рассчитанного ранее непрерывного корректирующего звена в импульсную, используя метод билинейного преобразования:
Учитывая, что передаточная функция ЭВМ  и представляет собой отношение изображений выходной и входной величин, взятых в цифровой форме:
и представляет собой отношение изображений выходной и входной величин, взятых в цифровой форме:
 ,
,
и поделив числитель и знаменатель  , получим
, получим

При переходе к оригиналам получим
 ,
,
где x[n], y[n] – решетчатые функции входа и выхода соответственно.

Последнее уравнение представляет собой алгоритм работы ЭВМ, представляющий собой дискретный фильтр с передаточной функцией D(z).
3.3 Дискретная передаточная функция замкнутой системы
Найдем общую дискретную передаточную функцию разомкнутой системы, используя следующую формулу
 .
.
Данная формула применима, так как дискретный фильтр и экстраполятор разделены ключевым элементом.

Тогда для дискретной передаточной функции замкнутой системы получим

3.4 Исследование устойчивости
Устойчивость замкнутой цифровой САУ определяется видом корней характеристического уравнения. В устойчивой системе корни характеристического уравнения 1+W(z)=0 должны лежать внутри круга единичного радиуса, т.е. быть по модулю меньше единицы.
Найдем корни для нашего случая, они будут по модулю меньше единицы:
3.5 Построение переходного процесса
При известной передаточной функции замкнутой системы Ф(z) и известном входном воздействии G(z), изображение выходного сигнала находится по формуле: X(z)=Ф(z)G(z). Для единичного скачка на входе g(t)=1 имеем G(z)=z/(z-1). Тогда

Для отыскания оригинала выходного воздействия (переходной функции) воспользуемся аналогом формулы Карсона-Хевисайда для дискретных систем.
Этих данных достаточно чтобы построить переходный процесс дискретной системы (см. рис. №14).
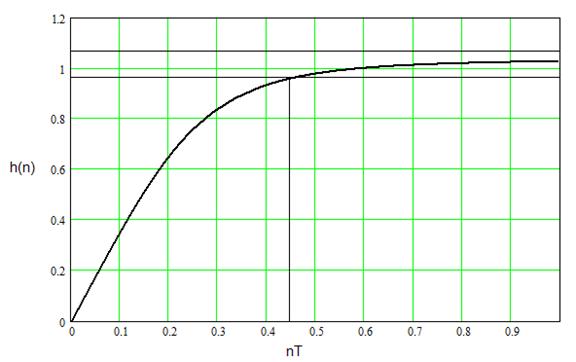
Рис. 17. График переходного процесса в замкнутой дискретной системе
Из графика переходного процесса можно определить некоторые параметры, определяющие качество процесса управления. Найдем:
tp = 0.45 c – время регулирования, значение данного параметра удовлетворяет техническому заданию с запасом.

–максимальное перерегулирование динамической системы. Полученное значение перерегулирования полностью удовлетворяет техническому заданию и имеет запас по численному значению.
Заключение
В настоящей работе был осуществлен синтез динамической системы управления с заданными показателями качества на основании исходной структуры. Получение необходимых параметров было достигнуто двумя способами – непрерывной и цифровой последовательной коррекцией исходной структуры системы. Полученные в работе результаты полностью соответствуют техническому заданию.
Каждый из методов коррекции имеет свои достоинства и недостатки. Оба метода не являются абсолютно точными.
Ошибка при синтезе аналогового фильтра объясняется изначальной аппроксимацией логарифмических амплитудно-частотных характеристик (ЛАЧХ): их погрешность достигает в некоторых точках 3 дБ. Выбор желаемой ЛАЧХ также не является однозначным и содержит ошибки построения графиков. Графическое вычитание ЛАЧХ усиливает погрешность. Метод синтеза цифрового фильтра еще более неточен, так как осуществляется на основании аналогового фильтра. К ошибкам непрерывной коррекции добавляются ошибки математических преобразований, так как работать приходится с суммой чисел несопоставимых порядков.
Ошибку вносит и поиск корней многочлена высокой степени, алгоритм которого заложен в стандартный математический пакет и неизвестен, получение же корней многочлена «вручную» представляется почти невыполнимой задачей.
Проблема выбора технической реализации непрерывных и дискретных устройств коррекции также неоднозначна.
Аналоговые фильтры легко реализуются, не требуют значительных материальных затрат и применения новейшей элементной базы, однако точность их реализации и отклонение параметров в процессе работы значительны.
Дискретные фильтры, реализуемые на ЭВМ, требуют больших материальных затрат ввиду наличия ЭВМ в контуре регулирования, однако могут быть реализованы с любой ненулевой точностью. Надежность непрерывных и дискретных корректирующих устройств также различна и определяется в основном используемой элементной базой.
Дата добавления: 2018-08-06; просмотров: 230; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!