Задание на проведение кинематического и динамического анализа механизма
Министерство образования и науки
Российской Федерации
Санкт-Петербургский государственный
архитектурно-строительный университет
Т. В. ВИНОГРАДОВА, Ю. В. КУЛИДА
АНАЛИЗ ПЛОСКИХ
РЫЧАЖНЫХМЕХАНИЗМОВ
Учебно-методическое пособие
Санкт-Петербург
2017
УДК 621.81
Рецензенты: канд. техн. наук доц. Б.С. Доброборский (СПбГАСУ); канд. техн. наук доц. Я.С. Ватулин (ПГУПС)
Виноградова, Т. В.
Анализ плоских рычажных механизмов: учеб.-метод. пособие. / Т. В. Виноградова, Ю. В. Кулида; СПбГАСУ – СПб., 2017. – 62 с.
ISBN
Учебно-методическое пособие разработано в соответствии с программами и учебными планами дисциплины «Теория машин и механизмов», также раздела, изучающего теорию машин и механизмов в составе дисциплин «Механика» и «Прикладная механика». Содержит методические указания по курсовому проектированию в рамках курса дисциплины «Теория машин и механизмов».
В пособии изложена методика выполнения заданий по исследованию кинематики и динамики механизмов. Приведены методы анализа механизмов с помощью графических построений и графоаналитические методы анализа плоских рычажных механизмов.
Издание содержит примеры выполнения кинематического и силового анализа плоских рычажных механизмов и альбом заданий для курсового проектирования при изучении дисциплины «Теория машин и механизмов» и задач, предлагаемых при изучении дисциплин «Прикладная механика» и «Механика».
|
|
|
Библиогр. назв. 6., табл. 2, ил. 36
Рекомендовано Учебно-методическим советом СПбГАСУ в качестве учебно-методического пособия.
ISBN
© Т.В. Виноградова, Ю.В. Кулида, 2017
© Санкт-Петербургский государственный
архитектурно-строительный университет, 2017
Введение
При проектировании большинство современных машин можно представить по схеме (рис. 1.1) двигатель (М) – передаточный механизм – рабочий орган технологической машины, или исполнительный механизм (ИМ). В качестве исполнительных механизмов часто применяются различные рычажные механизмы. Двигатель и передаточный механизм объединяют в привод машины.
Привод – это энергосиловое устройство, приводящее в движение машину или механизм. Иными словами, привод машины – это устройство, предназначенное для преобразования подводимой первичной энергии в механическую работу, выполняемую исполнительными органами машины.
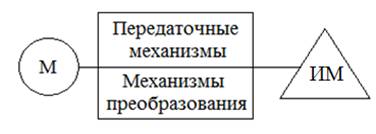
Рис. 1.1. Блок-схема машины
Курсовая работа, выполняемая студентами, предусматривает исследование структуры, кинематики и динамики исполнительного механизма, то есть рычажного механизма. Расчеты могут выполняться двумя способами: аналитическим и графоаналитическим.
|
|
|
Сущность аналитических методов анализа механизма заключается в том, что его кинематические и динамические характеристики определяются в виде аналитических выражений, содержащих конечное число алгебраических или тригонометрических операций, при этом аналитические выражения могут определять функцию явно, неявно или параметрически. Эта часть расчетов выполняется с помощью ЭВМ.
Графоаналитические методы анализа механизма представляют собой графическое вычисление, которое основано на геометрических построениях, связанных с использованием достаточно простых аналитических соотношений (например, векторных), с некоторым приближением заменяющих аналогичные аналитические операции. Эти расчеты по определению кинематических параметров механизма и инерционных нагрузок выполняются студентами в качестве проверочных.
При расчетах с помощью ЭВМ необходимо иметь представление о машине в целом, параметры которой рассчитываются, и о механизмах, входящих в состав машины. Поэтому, перед тем как приступить к исследованию механизма с помощью ЭВМ, необходимо разобраться в логической структуре используемой программы и в особенностях её работы, а также подробно изучить кинематическую схему рычажного механизма.
|
|
|
Допускаемое расхождение при вычислении по аналитическим формулам и при использовании графоаналитических методов составляет 5…10%.
Задание на проведение кинематического и динамического анализа механизма
Основным содержанием этой курсовой работы является исследование структуры, кинематики и динамики заданного плоского рычажного механизма и определение параметров привода машины.
Курсовая работа состоит из ряда взаимосвязанных и последовательно выполняемых этапов:
1. Вычертить кинематическую схему механизма.
2. Определить степень свободы механизма.
3. Определить траектории движения основных точек механизма, выбрать направление рабочего и холостого хода в течение одного кинематического цикла.
4. Построить планы линейных скоростей и ускорений характерных основных точек звеньев механизма и центров масс S за тот же цикл движения.
5. Определить внешнюю нагрузку и момент сил полезного сопротивления Мпс, приведенные к главному валу механизма (кривошипу).
6. Определить моменты инерции звеньев и рассчитать приведенный к главному валу механизма (кривошипу) момент инерции масс движущихся звеньев механизма.
|
|
|
7. Выбрать по каталогу электродвигатель. Выбор осуществляется по мощности Рдв. Для выбранного электродвигателя выписать отдельно значение номинальной частоты вращения пдв.
8. Определить общее передаточное отношение зубчатого механизма (передаточное число редуктора u = nдв/nкр, где nдв – номинальная частота вращения вала электродвигателя, nкр – частота вращения кривошипа), а также передаточное отношение каждой ступени зубчатого механизма.
9. Оформить пояснительную записку, которая должна включать:
9.1. Общую структурную схему машины с заданным рычажным механизмом;
9.2. Структурную схему механизма с исходными данными по структурным группам, дополнив расчетом степени подвижности W механизма;
9.3. Графики и таблицы скорости и ускорения движения исполнительного органа (ползуна) с численными значениями для 6 положений;
9.4. График задания внешней нагрузки, а также график и таблицу значений приведенного момента сил;
9.5. График и таблицу значений приведенного момента инерции;
9.6. Механические характеристики электродвигателя;
9.7. Исходные данные для расчета редуктора;
9.8. Результаты расчета геометрических размеров редуктора;
9.9. График истинного закона изменения угловой скорости главного вала (кривошипа) за полный оборот ωкр = f(φкр) с оценкой неравномерности вращения.
Графическая часть задания выполняется на листах формата А2 или А3, где должно быть изображено следующее:
- схема механизма с построением плана положений;
- план скоростей и ускорений для заданного положения механизма;
- план сил и определение уравновешивающих и приведённых сил и моментов методом «рычага Н.Е. Жуковского»;
- диаграмма энергомасс.
Дата добавления: 2018-05-13; просмотров: 290; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!