Понятие об электромеханических и механических характеристиках и режимах работы двигателей.
Важное значение для теории и практики электроприводов имеют электромеханические  и механические характеристики
и механические характеристики  двигателей. Механические характеристики двигателей в сочетании с уравнениями движения электропривода позволяют исследовать движение электромеханических систем в целом. В зависимости от режима работы электромеханические и механические характеристики подразделяются на статические и динамические. Статическая механическая характеристика представляет собой геометрическое место точек на плоскости
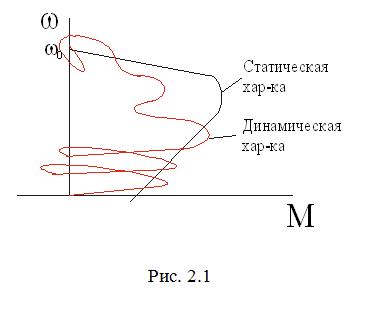
двигателей. Механические характеристики двигателей в сочетании с уравнениями движения электропривода позволяют исследовать движение электромеханических систем в целом. В зависимости от режима работы электромеханические и механические характеристики подразделяются на статические и динамические. Статическая механическая характеристика представляет собой геометрическое место точек на плоскости  , соответствующих установившемуся режимам работы, а динамическая характеристика – геометрическое место точек на той же плоскости, каждой из которых соответствует определенный момент времени. В качестве примера на рис. 2.1 изображены статическая и динамическая механические характеристики асинхронного двигателя для режима пуска в холостую.
, соответствующих установившемуся режимам работы, а динамическая характеристика – геометрическое место точек на той же плоскости, каждой из которых соответствует определенный момент времени. В качестве примера на рис. 2.1 изображены статическая и динамическая механические характеристики асинхронного двигателя для режима пуска в холостую.
При изменении нагрузки на валу двигателя скорость его изменяется. Величиной, характеризующей степень ее изменения, является жесткость. Статическая жесткость характеристики определяется как отношение приращения момента к приращению скорости  .
.
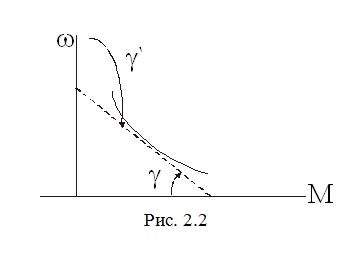
Статические характеристики двигателей имеют отрицательную жесткость, если при увеличении нагрузки скорость их уменьшается.
В динамических режимах работы электропривода жесткая и даже абсолютно жесткая статическая характеристика превращается в мягкую или имеющую переменную жесткость как видно из рис. 2.1. Поэтому для правильного суждения о жесткости характеристик двигателя или электропривода в этих режимах используется понятие динамической жесткости. Модуль динамической жесткости определяется как отношение амплитуд установившихся гармонических колебаний момента и угловой скорости относительно средних значений
|
|
|
 при Dwg ®0.
при Dwg ®0.
В заключение рассмотрим возможные режимы работы ЭМП с точки зрения направления потоков энергии и органичениях, накладываемых на протекание этих режимов.
Основным режимом работы ЭМП и двигателя является двигательный, при котором мощность, потребляемая из сети Рс, в основном преобразуется в механическую Рмех, а остальная часть DР теряется в виде тепла в обмотках и стали машины.
К тормозным, т.е. генераторным, относятся режимы:
а) рекуперативное торможение;
б) противовключение;
в) динамическое торможение.
В режиме рекуперативного торможения механическая мощность Рмех, поступающая с вала механизма, преобразуется в электрическую РС и отдается в сеть за исключением потерь в обмотках и стали.
В режиме противовключения двигатель потребляет мощность Рс из сети и с вала механизма Рмех и вся она теряется в виде тепла в обмотках и стали.
|
|
|

В режиме динамического торможения двигатель отключен от сети, работает автономным генератором. Вся механическая мощность, поступающая с вала механизма, преобразуется в электрическую и рассеивается в виде тепла в обмотках и стали машины.
Процесс электромеханического преобразования энергии сопровождаются потерями энергии, вызывающими нагрев машины. Чем больше ее нагрузка, тем больше тепла выделяется в машине, тем выше температура ее элементов. Максимально допустимая t° двигателя ограничивается максимально допустимым нагревом изоляции, т.к. превышение допустимой t° резко сокращает срок службы изоляции. Отсюда вытекает ограничение по нагреву. Однако ограничение по нагреву не исключает возможность кратковременной перенагрузки двигателя, т.к. за время такой нагрузки t° двигателя заметно измениться не сможет.
Различают, также перегрузочную способность двигателя по току  и по моменту
и по моменту  .
.
Перегрузочная способность двигателей постоянного тока ограничивается условиями коммутации, а двигателей переменного тока – наибольшим моментом, который машина способа развить при номинальном напряжении и номинальном возбуждении (для синхронных двигателей).
|
|
|
Перегрузочная способность двигателей постоянного тока по моменту lм не должна быть меньше 2,5. Для крановых и металлургических двигателей постоянного тока в зависимости от мощности и способа возбуждения составляет lм=2,5¸5,5.
Перегрузочная способность двигателей постоянного тока по току составляет lI=1,5¸3,6, а для двигателей с гладким якорем lI=6¸8.
Перегрузочная способность асинхронных двигателей (АД) длительного режима по моменту lМ=1,7¸2,2, а для крановых и металлургических двигателей она более 2,3. Перегрузочная способность АД и синхронных двигателей по току не нормируется.
Перегрузочная способность синхронных двигателей (мгновенная) по моменту lМ=2,5¸3, а за счет форсировки возбуждения может быть доведена до 3,5¸4.
Дата добавления: 2018-05-12; просмотров: 323; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!