Алюминиевыми или медными (в знаменателе) жилами
| Сечение жилы, мм2 | Нагрузка (А) кабелей, проложенных | ||
| в земле, t = 15°C | в воздухе, t = 25°C | в воде | |
| 4 | 38 / 50 | – /35 | |
| 6 | 46 /60 | 31 / 45 | |
| 10 | 65 / 85 | 45 / 60 | |
| 16 | 90 / 115 | 60 / 80 | |
| 25 | 115 / 150 | 75 / 100 | 150 / 195 |
| 35 | 135 / 175 | 95 / 120 | 175 / 280 |
| 50 | 165 / 215 | 110 / 145 | 220 / 285 |
| 70 | 200 / 265 | 140 / 185 | 270 / 350 |
| 95 | 240 / 310 | 165 / 215 | 315 / 410 |
| 120 | 270 / 350 | 200 / 260 | 360 / 470 |
| 150 | 305 / 395 | 230 / 300 | |
| 185 | 345 / 450 | 260 / 340 | |
Таблица 7 Токовые нагрузки проводов с алюминиевыми
Или медными (в знаменателе) жилами с резиновой и поливинилхлоридной изоляцией
| Сечение жилы, мм2 | Нагрузка (А) для проводов, проложенных | |
| открыто | 4 одножильных в одной трубе | |
| 2 | 21 / – | 15 / – |
| 2,5 | 24 / 30 | 19 / 25 |
| 3 | 27 / – | 21 / – |
| 4 | 32 / 41 | 23 / 30 |
| 5 | 36 / – | 27 / – |
| 6 | 39 / 50 | 30 / 40 |
| 8 | 46 / - | 37 / – |
| 10 | 60 / 80 | 39 / 50 |
| 16 | 75 / 100 | 55 / 75 |
| 25 | 106 / 140 | 70 / 90 |
| 35 | 130 / 170 | 85 / 115 |
| 50 | 165 / 215 | 120 / 150 |
| 70 | 210 / 270 | 140 / 185 |
| 95 | 255 / 330 | 175 / 225 |
| 120 | 295 / 385 | 200 / 260 |
| 150 | 340 / 440 | – |
| 185 | 390 / 510 | – |
| 240 | 465 / 605 | – |
| 300 | 535 / 695 | – |
| 400 | 645 / 830 | – |
Таблица 8 Удельные потери напряжения (е0 %) в трехфазных
Сетях 380 В, выполненных проводами в трубах и
|
|
|
кабелями, % (Акм)
| Ø, мм2 | е0 % при cos jп | |||||||
| 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 | |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Провода и кабели с алюминиевыми жилами | ||||||||
| 2,5 | 1,76 | 2,32 | 2,89 | 3,45 | 4,02 | 4,58 | 5,14 | 5,69 |
| 4 | 1,11 | 1,47 | 1,82 | 2,18 | 2,52 | 2,87 | 3,23 | 3,56 |
| 6 | 0,754 | 0,988 | 1,22 | 1,46 | 1,69 | 1,92 | 2,15 | 2,37 |
| 10 | 0,469 | 0,610 | 0,748 | 0,887 | 1,03 | 1,17 | 1,29 | 1,42 |
| 16 | 0,307 | 0,394 | 0,480 | 0,567 | 0,642 | 0,735 | 0,817 | 0,888 |
| 25 | 0,211 | 0,266 | 0,321 | 0,375 | 0,428 | 0,480 | 0,53 | 0,569 |
| 35 | 0,160 | 0,200 | 0,238 | 0,276 | 0,313 | 0,349 | 0,384 | 0,407 |
| 50 | 0,122 | 0,149 | 0,176 | 0,202 | 0,277 | 0,251 | 0,273 | 0,284 |
| 70 | 0,0965 | 0,116 | 0,134 | 0,152 | 0,169 | 0,185 | 0,200 | 0,203 |
| 95 | 0,080 | 0,0934 | 0,106 | 0,119 | 0,130 | 0,141 | 0,151 | 0,150 |
| 120 | 0,070 | 0,0806 | 0,906 | 0,100 | 0,109 | 0,117 | 0,123 | 0,119 |
| 150 | 0,0628 | 0,0710 | 0,0787 | 0,0855 | 0,0915 | 0,0970 | 0,100 | 0,0945 |
| 185 | 0,0574 | 0,0638 | 0,0692 | 0,0746 | 0,0792 | 0,0830 | 0,0847 | 0,0769 |
| 240 | 0,0510 | 0,0555 | 0,0601 | 0,0637 | 0,0664 | 0,0683 | 0,0687 | 0,0592 |
Окончание табл. 8
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ||
| Провода и кабели с медными жилами
| ||||||||||
| 1 | 2,63 | 3,43 | 4,26 | 5,10 | 5,94 | 6,76 | 7,6 | 8,41 | ||
| 1,5 | 1,74 | 2,29 | 2,85 | 3,41 | 3,96 | 4,51 | 5,06 | 5,60 | ||
| 2,5 | 1,06 | 1,40 | 1,73 | 2,06 | 2,39 | 2,72 | 3,05 | 3,37 | ||
| 4 | 0,68 | 0,891 | 1,10 | 1,30 | 1,51 | 1,71 | 1,92 | 2,11 | ||
| 6 | 0,464 | 0,603 | 0,741 | 0,880 | 1,02 | 1,15 | 1,28 | 1,41 | ||
| 10 | 0,293 | 0,378 | 0,458 | 0,541 | 0,621 | 0,70 | 0,776 | 0,842 | ||
| 16 | 0,199 | 0,250 | 0,301 | 0,351 | 0,400 | 0,447 | 0,494 | 0,528 | ||
| 25 | 0,142 | 0,173 | 0,205 | 0,236 | 0,266 | 0,295 | 0,322 | 0,337 | ||
| 35 | 0,110 | 0,133 | 0,155 | 0,176 | 0,197 | 0,216 | 0,234 | 0,241 | ||
| 50 | 0,0874 | 0,103 | 0,117 | 0,132 | 0,146 | 0,158 | 0,169 | 0,169 | ||
| 70 | 0,0701 | 0,0805 | 0,0901 | 0,0997 | 0,107 | 0,115 | 0,121 | 0,120 | ||
| 95 | 0,0615 | 0,0692 | 0,760 | 0,0824 | 0,0879 | 0,0929 | 0,0956 | 0,0887 | ||
| 120 | 0,0555 | 0,0615 | 0,0664 | 0,0710 | 0,0751 | 0,0779 | 0,0787 | 0,0702 | ||
| 150 | 0,0514 | 0,0551 | 0,0592 | 0,0624 | 0,0646 | 0,0664 | 0,0660 | 0,0562 | ||
| 185 | 0,0478 | 0,0510 | 0,0537 | 0,0555 | 0,0574 | 0,0578 | 0,0565 | 0,0455 | ||
| 240 | 0,0440 | 0,0460 | 0,0478 | 0,0490 | 0,0495 | 0,0490 | 0,0467 | 0,0350 | ||
Таблица 9
Варианты задания № 1 без п. 6
| Шиф р | P1 | Р2 | Р3 | Р4 | t1 | t2 | t3 | t4 | ηпер | ηРМн | МPMн | JРМ | α | |
| кВт
| мин | мин–1 | Н·м | кг·м2 | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | |
| 00 | 0,3 | 0,4 | 0,2 | 0,1 | 22 | 12 | 25 | 8 | 0,6 | 960 | 2,4 | 0,02 | 1 | |
| 01 | 0,3 | 0,4 | 7,0 | 0,3 | 10 | 8 | 12 | 20 | 0,6 | 1470 | 1,6 | 0,02 | 2 | |
| 02 | 0,2 | 0,3 | 0,2 | 0,4 | 14 | 8 | 22 | 18 | 0,6 | 2800 | 0,60 | 0,01 | 0 | |
| 03 | 0,1 | 0,2 | 0,5 | 0,1 | 12 | 10 | 20 | 8 | 0,8 | 2700 | 0,40 | 0,07 | 1 | |
| 04 | 5,0 | 5,8 | 0,1 | 3 | 15 | 18 | 24 | 10 | 0,9 | 2850 | 12 | 0,07 | 2 | |
| 05 | 5 | 8 | 5 | 4 | 20 | 15 | 22 | 26 | 0,9 | 1470 | 32 | 0,01 | 1 | |
| 06 | 7 | 16 | 0,1 | 14 | 15 | 18 | 22 | 24 | 0,9 | 1420 | 70 | 0,04 | 2 | |
| 07 | 13 | 12 | 4,6 | 10 | 22 | 13 | 28 | 16 | 0,9 | 960 | 70 | 0,08 | 1 | |
| 08 | 8 | 24 | 6 | 16 | 24 | 18 | 10 | 16 | 0,9 | 1460 | 100 | 0,06 | 2 | |
| 09 | 18 | 33 | 10 | 16 | 20 | 20 | 18 | 26 | 0,9 | 1480 | 140 | 0,04 | 1 | |
| 10 | 28 | 40 | 6 | 10 | 18 | 16 | 24 | 20 | 0,8 | 1430 | 170 | 0,26 | 2 | |
| 11 | 30 | 50 | 10 | 20 | 20 | 20 | 22 | 18 | 0,8 | 1400 | 200 | 0,03 | 1 | |
| 12 | 40 | 6,6 | 20 | 4 | 15 | 16 | 20 | 22 | 0,6 | 1440 | 35 | 0,01 | 2 | |
| 13 | 5 | 1,7 | 20 | 1,3 | 16 | 18 | 14 | 6 | 0,9 | 1460 | 65 | 0,38 | 2 | |
| 14 | 1 | 3,2 | 30 | 1 | 18 | 12 | 20 | 24 | 0,8 | 2700 | 60 | 0,06 | 1 | |
| 15 | 2,6 | 4,2 | 4,5 | 3 | 20 | 20 | 22 | 24 | 0,9 | 2800 | 8 | 0,65 | 1 | |
| 16 | 3,6 | 1,6 | 0,8 | 1,6 | 16 | 16 | 10 | 20 | 0,8 | 1460 | 6,2 | 0,32 | 0 | |
| 17 | 1,0 | 3,2 | 1,8 | 1 | 16 | 16 | 20 | 10 | 0,8 | 2700 | 6,3 | 0,06 | 1 | |
| 18 | 2,8 | 6 | 2,8 | 3 | 16 | 18 | 20 | 22 | 0,7 | 2850 | 13 | 0,07 | 0 | |
| 19 | 5 | 4 | 0,8 | 3 | 16 | 20 | 12 | 20 | 0,9 | 1460 | 25 | 0,07 | 0 | |
| 20 | 6 | 30 | 2 | 15 | 15 | 20 | 25 | 30 | 1,0 | 960 | 25 | 0,26 | 1 | |
| 21 | 40 | 3,8 | 4 | 4 | 16 | 20 | 25 | 30 | 0,7 | 1460 | 16 | 0,06 | 2 | |
| 22 | 4,5 | 0,4 | 5 | 2,2 | 18 | 16 | 20 | 26 | 0,8 | 1470 | 1,4 | 0,18 | 0 | |
| 23 | 0,3 | 0,3 | 2,0 | 0,1 | 12 | 16 | 18 | 20 | 0,8 | 960 | 2,2 | 0,02 | 2 | |
| 24 | 0,4 | 2 | 2,6 | 0,8 | 20 | 10 | 15 | 22 | 1,0 | 2700 | 3,2 | 0,38 | 1 | |
| 25 | 1 | 20 | 0,2 | 10 | 18 | 20 | 22 | 26 | 1,0 | 1460 | 100 | 0,06 | 2 | |
| 26 | 24 | 28 | 0,2 | 15 | 10 | 15 | 18 | 20 | 0,9 | 1480 | 140 | 0,04 | 1 | |
| 27 | 33 | 3 | 1,4 | 2 | 16 | 20 | 18 | 24 | 0,8 | 2700 | 10 | 0,6 | 2 | |
| 28 | 5 | 12 | 18 | 6 | 18 | 16 | 20 | 22 | 1,0 | 960 | 66 | 0,06 | 1 | |
| 29 | 8 | 6 | 20 | 5 | 10 | 14 | 16 | 22 | 0,9 | 1470 | 35 | 0,08 | 0 | |
| 30 | 8 | 10 | 4 | 12 | 12 | 20 | 24 | 18 | 1,0 | 1420 | 60 | 0,04 | 1 | |
| 31 | 18 | 10 | 10 | 4 | 12 | 16 | 20 | 22 | 0,9 | 960 | 66 | 0,09 | 2 | |
| 32 | 12 | 0,4 | 4 | 0,4 | 18 | 12 | 16 | 20 | 0,9 | 1470 | 1,6 | 0,02 | 1 | |
Продолжение табл. 9
|
|
|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 33 | 0,3 | 6 | 8 | 5 | 12 | 16 | 20 | 18 | 0,9 | 2700 | 18 | 0,01 | 1 |
| 34 | 8 | 14 | 8 | 12 | 12 | 14 | 20 | 12 | 0,9 | 1420 | 70 | 0,04 | 0 |
| 35 | 18 | 40 | 0,2 | 20 | 15 | 16 | 20 | 22 | 1,0 | 1400 | 200 | 0,03 | 1 |
| 36 | 50 | 6 | 4 | 3 | 18 | 20 | 24 | 15 | 0,9 | 1440 | 30 | 0,01 | 0 |
| 37 | 7 | 10 | 10 | 12 | 12 | 20 | 24 | 18 | 1,0 | 1420 | 70 | 0,04 | 1 |
| 38 | 18 | 4 | 30 | 4 | 12 | 14 | 16 | 20 | 1,0 | 1460 | 16 | 0,65 | 0 |
| 39 | 5 | 0,4 | 4 | 0,5 | 20 | 16 | 18 | 18 | 0,9 | 2700 | 0,8 | 0,04 | 2 |
| 40 | 0,3 | 0,4 | 0,2 | 0,1 | 22 | 12 | 25 | 8 | 0,6 | 960 | 2,4 | 0,02 | 1 |
| 41 | 0,3 | 0,4 | 7,0 | 0,3 | 10 | 8 | 12 | 20 | 0,6 | 1470 | 1,6 | 0,02 | 2 |
| 42 | 0,2 | 0,3 | 0,2 | 0,4 | 14 | 8 | 22 | 18 | 0,6 | 2800 | 0,60 | 0,01 | 0 |
| 43 | 0,1 | 0,2 | 0,5 | 0,1 | 12 | 10 | 20 | 8 | 0,8 | 2700 | 0,40 | 0,07 | 1 |
| 44 | 5,0 | 5,8 | 0,1 | 3 | 15 | 18 | 24 | 10 | 0,9 | 2850 | 12 | 0,07 | 2 |
| 45 | 5 | 8 | 5 | 4 | 20 | 15 | 22 | 26 | 0,9 | 1470 | 32 | 0,01 | 1 |
| 46 | 7 | 16 | 0,1 | 14 | 15 | 18 | 22 | 24 | 0,9 | 1420 | 70 | 0,04 | 2 |
| 47 | 13 | 12 | 4,6 | 10 | 22 | 13 | 28 | 16 | 0,9 | 960 | 70 | 0,08 | 1 |
| 48 | 8 | 24 | 6 | 16 | 24 | 18 | 10 | 16 | 0,9 | 1460 | 100 | 0,06 | 2 |
| 49 | 18 | 33 | 10 | 16 | 20 | 20 | 18 | 26 | 0,9 | 1480 | 140 | 0,04 | 1 |
| 50 | 28 | 40 | 6 | 10 | 18 | 16 | 24 | 20 | 0,8 | 1430 | 170 | 0,26 | 2 |
| 51 | 30 | 50 | 10 | 20 | 20 | 20 | 22 | 18 | 0,8 | 1400 | 200 | 0,03 | 1 |
| 52 | 40 | 6,6 | 20 | 4 | 15 | 16 | 20 | 22 | 0,6 | 1440 | 35 | 0,01 | 2 |
| 53 | 5 | 1,7 | 20 | 1,3 | 16 | 18 | 14 | 6 | 0,9 | 1460 | 65 | 0,38 | 2 |
| 54 | 1 | 3,2 | 30 | 1 | 18 | 12 | 20 | 24 | 0,8 | 2700 | 60 | 0,06 | 1 |
| 55 | 2,6 | 4,2 | 4,5 | 3 | 20 | 20 | 22 | 24 | 0,9 | 2800 | 8 | 0,65 | 1 |
| 56 | 3,6 | 1,6 | 0,8 | 1,6 | 16 | 16 | 10 | 20 | 0,8 | 1460 | 6,2 | 0,32 | 0 |
| 57 | 1,0 | 3,2 | 1,8 | 1 | 16 | 16 | 20 | 10 | 0,8 | 2700 | 6,2 | 0,06 | 1 |
| 58 | 2,8 | 6 | 2,8 | 3 | 16 | 18 | 20 | 22 | 0,7 | 2850 | 13 | 0,07 | 0 |
| 59 | 5 | 4 | 0,8 | 3 | 16 | 20 | 12 | 20 | 0,9 | 1460 | 25 | 0,07 | 0 |
| 60 | 6 | 30 | 2 | 15 | 15 | 20 | 25 | 30 | 1,0 | 960 | 25 | 0,26 | 1 |
| 61 | 40 | 3,8 | 4 | 4 | 16 | 20 | 25 | 30 | 0,7 | 1460 | 16 | 0,06 | 2 |
| 62 | 4,5 | 0,4 | 5 | 2,2 | 18 | 16 | 20 | 26 | 0,8 | 1470 | 1,4 | 0,18 | 0 |
| 63 | 0,3 | 0,3 | 2,0 | 0,1 | 12 | 16 | 18 | 20 | 0,8 | 960 | 2,2 | 0,02 | 2 |
| 64 | 0,4 | 2 | 2,6 | 0,8 | 20 | 10 | 15 | 22 | 1,0 | 2700 | 3,2 | 0,38 | 1 |
| 65 | 1 | 20 | 0,2 | 10 | 18 | 20 | 22 | 26 | 1,0 | 1460 | 100 | 0,06 | 2 |
Окончание табл. 9
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 66 | 24 | 28 | 0,2 | 15 | 10 | 15 | 18 | 20 | 0,9 | 1480 | 140 | 0,04 | 1 |
| 67 | 33 | 3 | 1,4 | 2 | 16 | 20 | 18 | 24 | 0,8 | 2700 | 10 | 0,6 | 2 |
| 68 | 5 | 12 | 18 | 6 | 18 | 16 | 20 | 22 | 1,0 | 960 | 66 | 0,06 | 1 |
| 69 | 8 | 6 | 20 | 5 | 10 | 14 | 16 | 22 | 0,9 | 1470 | 35 | 0,08 | 0 |
| 70 | 8 | 10 | 4 | 12 | 12 | 20 | 24 | 18 | 1,0 | 1420 | 60 | 0,04 | 1 |
| 71 | 18 | 10 | 10 | 4 | 12 | 16 | 20 | 22 | 0,9 | 960 | 66 | 0,09 | 2 |
| 72 | 12 | 0,4 | 4 | 0,4 | 18 | 12 | 16 | 20 | 0,9 | 1470 | 1,6 | 0,02 | 1 |
| 73 | 0,3 | 6 | 8 | 5 | 12 | 16 | 20 | 18 | 0,9 | 2700 | 18 | 0,01 | 1 |
| 74 | 8 | 14 | 8 | 12 | 12 | 14 | 20 | 12 | 0,9 | 1420 | 70 | 0,04 | 0 |
| 75 | 18 | 40 | 0,2 | 20 | 15 | 16 | 20 | 22 | 1,0 | 1400 | 200 | 0,03 | 1 |
| 76 | 50 | 6 | 4 | 3 | 18 | 20 | 24 | 15 | 0,9 | 1440 | 30 | 0,01 | 0 |
| 77 | 7 | 10 | 10 | 12 | 12 | 20 | 24 | 18 | 1,0 | 1420 | 70 | 0,04 | 1 |
| 78 | 18 | 4 | 30 | 4 | 12 | 14 | 16 | 20 | 1,0 | 1460 | 16 | 0,65 | 0 |
| 79 | 5 | 0,4 | 4 | 0,5 | 20 | 16 | 18 | 18 | 0,9 | 2700 | 0,8 | 0,04 | 2 |
| 80 | 0,3 | 0,4 | 0,2 | 0,1 | 22 | 12 | 25 | 8 | 0,6 | 960 | 2,4 | 0,02 | 1 |
| 81 | 0,3 | 0,4 | 7,0 | 0,3 | 10 | 8 | 12 | 20 | 0,6 | 1470 | 1,6 | 0,02 | 2 |
| 82 | 0,2 | 0,3 | 0,2 | 0,4 | 14 | 8 | 22 | 18 | 0,6 | 2800 | 0,60 | 0,01 | 0 |
| 83 | 0,1 | 0,2 | 0,5 | 0,1 | 12 | 10 | 20 | 8 | 0,8 | 2700 | 0,40 | 0,07 | 1 |
| 84 | 5,0 | 5,8 | 0,1 | 3 | 15 | 18 | 24 | 10 | 0,9 | 2850 | 12 | 0,07 | 2 |
| 85 | 5 | 8 | 5 | 4 | 20 | 15 | 22 | 26 | 0,9 | 1470 | 32 | 0,01 | 1 |
| 86 | 7 | 16 | 0,1 | 14 | 15 | 18 | 22 | 24 | 0,9 | 1420 | 70 | 0,04 | 2 |
| 87 | 13 | 12 | 4,6 | 10 | 22 | 13 | 28 | 16 | 0,9 | 960 | 70 | 0,08 | 1 |
| 88 | 8 | 24 | 6 | 16 | 24 | 18 | 10 | 16 | 0,9 | 1460 | 100 | 0,06 | 2 |
| 89 | 18 | 33 | 10 | 16 | 20 | 20 | 18 | 26 | 0,9 | 1480 | 140 | 0,04 | 1 |
| 90 | 28 | 40 | 6 | 10 | 18 | 16 | 24 | 20 | 0,8 | 1430 | 170 | 0,26 | 2 |
| 91 | 30 | 50 | 10 | 20 | 20 | 20 | 22 | 18 | 0,8 | 1400 | 200 | 0,03 | 1 |
| 92 | 40 | 6,6 | 20 | 4 | 15 | 16 | 20 | 22 | 0,6 | 1440 | 35 | 0,01 | 2 |
| 93 | 5 | 1,7 | 20 | 1,3 | 16 | 18 | 14 | 6 | 0,9 | 1460 | 65 | 0,38 | 2 |
| 94 | 1 | 3,2 | 30 | 1 | 18 | 12 | 20 | 24 | 0,8 | 2700 | 60 | 0,06 | 1 |
| 95 | 2,6 | 4,2 | 4,5 | 3 | 20 | 20 | 22 | 24 | 0,9 | 2800 | 8 | 0,65 | 1 |
| 96 | 3,6 | 1,6 | 0,8 | 1,6 | 16 | 16 | 10 | 20 | 0,8 | 1460 | 6,2 | 0,32 | 0 |
| 97 | 1,0 | 3,2 | 1,8 | 1 | 16 | 16 | 20 | 10 | 0,8 | 2700 | 6,2 | 0,06 | 1 |
| 98 | 2,8 | 6 | 2,8 | 3 | 16 | 18 | 20 | 22 | 0,7 | 2850 | 13 | 0,07 | 0 |
| 99 | 5 | 4 | 0,8 | 3 | 16 | 20 | 12 | 20 | 0,9 | 1460 | 25 | 0,07 | 0 |
Таблица 10
Варианты задания № 1 с п. 6
| Шифр | Питающая линия | ||
| тип | материал | длина, м | |
| 1 | 2 | 3 | 4 |
| 00 | Кл | Cu | 50 |
| 01 | Кл | Al | 50 |
| 02 | Кл | Cu | 60 |
| 03 | Кл | Al | 60 |
| 04 | Кл | Cu | 70 |
| 05 | Кл | Al | 70 |
| 06 | Кл | Cu | 70 |
| 07 | Вл | Al | 100 |
| 08 | Вл | Cu | 100 |
| 09 | Вл | Al | 100 |
| 10 | Вл | Cu | 120 |
| 11 | Вл | Al | 120 |
| 12 | Вл | Cu | 130 |
| 13 | Вл | Al | 130 |
| 14 | Вл | Cu | 140 |
| 15 | Вл | Al | 140 |
| 16 | Кл | Cu | 140 |
| 17 | Кл | Al | 140 |
| 18 | Кл | Cu | 150 |
| 19 | Кл | Al | 150 |
| 20 | Кл | Cu | 150 |
| 21 | Кл | Al | 140 |
| 22 | Кл | Cu | 140 |
| 23 | Кл | Al | 120 |
| 24 | Кл | Cu | 120 |
| 25 | Кл | Al | 90 |
| 26 | Кл | Cu | 90 |
| 27 | Кл | Al | 50 |
| 28 | Кл | Cu | 50 |
| 29 | Кл | Al | 50 |
| 30 | Кл | Cu | 50 |
| 31 | Кл | Al | 70 |
| 32 | Вл | Cu | 100 |
Продолжение табл. 10
| 1 | 2 | 3 | 4 |
| 33 | Вл | Al | 100 |
| 34 | Вл | Cu | 80 |
| 35 | Вл | Al | 80 |
| 36 | Кл | Cu | 60 |
| 37 | Кл | Al | 50 |
| 38 | Кл | Cu | 50 |
| 39 | Кл | Al | 50 |
| 40 | Кл | Cu | 50 |
| 41 | Вл | Al | 100 |
| 42 | Вл | Cu | 100 |
| 43 | Вл | Al | 100 |
| 44 | Вл | Cu | 100 |
| 45 | Вл | Al | 90 |
| 46 | Вл | Cu | 80 |
| 47 | Кл | Al | 60 |
| 48 | Кл | Cu | 50 |
| 49 | Кл | Al | 50 |
| 50 | Кл | Cu | 45 |
| 51 | Кл | Al | 45 |
| 52 | Кл | Cu | 40 |
| 53 | Кл | Al | 40 |
| 54 | Вл | Cu | 70 |
| 55 | Кл | Al | 70 |
| 56 | Кл | Cu | 60 |
| 57 | Кл | Al | 60 |
| 58 | Вл | Cu | 80 |
| 59 | Вл | Al | 100 |
| 60 | Вл | Cu | 90 |
| 61 | Кл | Al | 60 |
| 62 | Кл | Cu | 70 |
| 63 | Кл | Al | 80 |
| 64 | Кл | Cu | 90 |
| 65 | Кл | Al | 95 |
| 66 | Кл | Cu | 100 |
| 67 | Вл | Al | 110 |
Окончание табл. 3.10
| 1 | 2 | 3 | 4 |
| 68 | Вл | Cu | 120 |
| 69 | Вл | Al | 130 |
| 70 | Вл | Cu | 140 |
| 71 | Вл | Al | 150 |
| 72 | Вл | Cu | 160 |
| 73 | Вл | Al | 170 |
| 74 | Вл | Cu | 180 |
| 75 | Вл | Al | 190 |
| 76 | Кл | Cu | 200 |
| 77 | Кл | Al | 210 |
| 78 | Кл | Cu | 220 |
| 79 | Кл | Al | 230 |
| 80 | Кл | Cu | 240 |
| 81 | Кл | Al | 250 |
| 82 | Кл | Cu | 260 |
| 83 | Кл | Al | 270 |
| 84 | Кл | Cu | 280 |
| 85 | Кл | Al | 290 |
| 86 | Кл | Cu | 190 |
| 87 | Кл | Al | 150 |
| 88 | Кл | Cu | 150 |
| 89 | Кл | Al | 150 |
| 90 | Кл | Cu | 150 |
| 91 | Кл | Al | 70 |
| 92 | Вл | Cu | 100 |
| 93 | Вл | Al | 100 |
| 94 | Вл | Cu | 80 |
| 95 | Вл | Al | 80 |
| 96 | Кл | Cu | 60 |
| 97 | Кл | Al | 50 |
| 98 | Кл | Cu | 50 |
| 99 | Кл | Al | 50 |
Примечание: Кл – кабельная линия в траншее; Вл –
линия, проложенная открыто; Al – алюминиевая токоведущая жила; Cu – медная токоведущая жила.
3. ЭЛЕКТРИЧ ЕСКИЕ ДВИГАТ ЕЛИ ПОСТОЯННОГО ТОКА
Схемы включения двигателя постоянного тока и его конструктивная схема
 Электроприводы на основе двигателей постоянного тока (ДПТ) очень распространены в технике, в том числе в АПК (двигатели стригальных машин и т.п.).
Электроприводы на основе двигателей постоянного тока (ДПТ) очень распространены в технике, в том числе в АПК (двигатели стригальных машин и т.п.).
 а б в
а б в
г д е
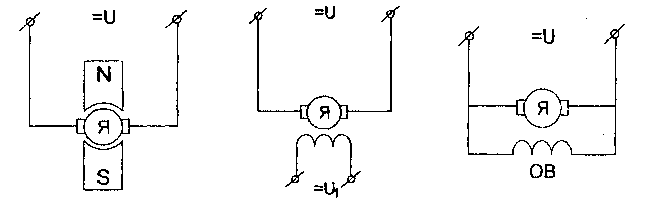
Рис. 3.1. Схемы включения ЭД постоянного тока Схемы включения ДПТ, представленные на рис. 3.1 а, б,
– это схемы включения двигателей с независимым
возбуждением. Все остальные схемы (см. рис. 3.1 в - е) – это схемы включения ДПТ с самовозбуждением. Схема, представленная на рис. 3.1, в соответствует включению ДПТ с параллельным возбуждением, схема, представленная на рис. 3.1, г – схема включения ДПТ с последовательным возбуждением. Рис. 3.1 д, е – схемы компаундного (смешанного) возбуждения. В последнее время в микроэлектроприводе применяется схема включения ДПТ с независимым возбуждением от постоянных магнитов ( см.
рис. 3.1, а) – это повышает КПД двигателя и значительно уменьшает его габариты. Реже применяется схема включения ДПТ, представленная на рис. 3.1 а (частота ее применения возрастает с увеличением допустимых размеров электропривода).
Считается, что наиболее устойчивыми в работе являются
схемы включения ДПТ с параллельным возбуждением. Двигатели с самовозбуждением позволяют производить регулирование скорости вращения ротора в ограниченных пределах.
В сельском хозяйстве наибольшее распространение

нашли схемы включения ДПТ с независимым возбуждением (см. рис. 3.1 а, б). Конструктивная схема ДПТ с независимым возбуждением представлена на рис. 3.2.
Рис. 3.2. Конструктивная схема ДПТ с НВ:
1 – статор; 2 – ротор; 3 – обмотка статора; 4 – обмотка ротора; 5 – вал двигателя; 6 – кольца коллектора; 7 – щетка
коллектора; 8 – шарикоподшипниковый узел опоры; 9 – корпус; 10 – крышка; 11 – ярмо; 12 – муфта; 13 – вал приводного устройства
Двумя слабыми звеньями в ДПТ являются щеточно-
коллекторный и подшипниковый узлы (шарикоподшипники
в ряде случаев заменяются магнитными, воздушными опорами и т.п.).
Обмотки ротора – третий по надежности элемент в двигателе постоянного тока.
Для повышения надежности ДПТ в последнее время применяют двигатели с печатной обмоткой.
Ярмо статора выполняется из магнито-мягких материалов и служит для замыкания магнитного потока.
Типы обмоток двигателей постоянного тока
Выделяют три типа конструкции обмоток якоря:
1) кольцевого (тороидального) типа;
2) барабанного типа;
3) плоского (колпачкового) типа.
Кольцевая обмотка и обмотка барабанного типа характерны для макромашин.
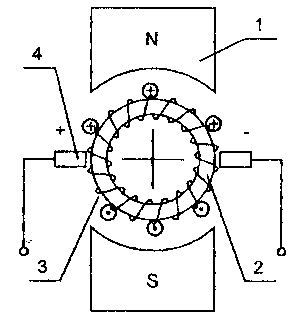
Обмотка плоского типа характерна для микромашин постоянного тока, применяемых в приборостроении. Вначале рассматривается электродвигатель с кольцевой обмоткой (рис. 3.3).
Рис. 3.3. Кольцевая обмотка ротора:
1 – статор; 2 – ротор с тороидальной обмоткой;
3 – щетка коллекторного узла
Направление вращения ротора определяется по правилу левой руки в соответствии с законом Ампера.
Недостаток ДПТ данного типа: внутренние части обмотки ротора используются вхолостую, что приводит к увеличению массы двигателя.
В обмотке барабанного типа (рис. 3.4) работают обе
половины витка, а лобовые части витков являются нерабочими. В одном пазу может быть несколько витков.
Обмотки плоского типа применяют в малогабаритных электродвигателях.

Рис. 3.4. Один виток обмотки барабанного типа
Особенности схемных и конструктивных решений ДПТ. Реакция якоря
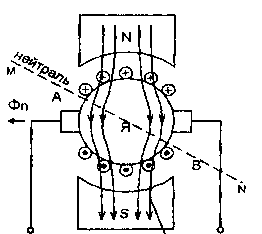
направление линий магнитной индукции магнитного поля статора
Рис. 3.5. Смещение электрической нейтрали ДПТ
На рис. 3.5 – 3.6 магнитный поток Ф создается магнитом статора, а магнитный поток ФП – обмоткой ротора (якоря) в соответствии с законом Био – Савара – Лапласа; ФР – результирующий магнитный поток.
Линия, перпендикулярная ФР, является нейтралью. Предполагаем, что линии магнитной индукции магнитного поля возбуждения располагаются параллельно вертикальной
оси симметрии.
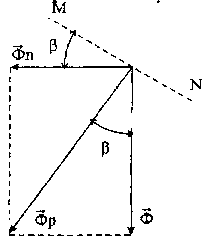 Векторная диаграмма, изображенная на рис. 3.6, показывает, что электрическая нейтраль MN поворачивается на угол β, и линии магнитной индукции результирующего магнитного поля изгибаются. Смещение электрической нейтрали от перпендикулярного положения относительно вертикальной оси симметрии двигателя представляет собой реакцию двигателя постоянного тока. Внешне эта реакция проявляется в повышенном искрении щеток коллектора, вплоть до появления «кругового огня», что приводит к быстрому выходу двигателя из строя.
Векторная диаграмма, изображенная на рис. 3.6, показывает, что электрическая нейтраль MN поворачивается на угол β, и линии магнитной индукции результирующего магнитного поля изгибаются. Смещение электрической нейтрали от перпендикулярного положения относительно вертикальной оси симметрии двигателя представляет собой реакцию двигателя постоянного тока. Внешне эта реакция проявляется в повышенном искрении щеток коллектора, вплоть до появления «кругового огня», что приводит к быстрому выходу двигателя из строя.
Рис. 3.6. Векторная диаграмма
Существуют следующие методы борьбы с реакцией обмоток ротора в двигателях постоянного тока:
1) перенос щеток – размещение щеток по электрической нейтрали MN (если угол β = const). При этом
tg β = ФП /Ф. (3.1)
В случае, если угол β изменяется (β = var), что имеет место при изменении величины тока якоря, то необходимо,
чтобы устройство перемещения щеток было совмещено со следящей системой;
2) 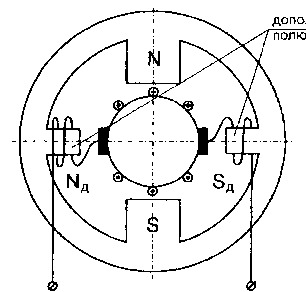
| дополнительные полюсы статора |
| Рис. 3.7. Схема ДПТ с дополнительными полюсами статора |
в 1885 г. Метер изобрел ДПТ с дополнительными полюсами статора. Обмотки дополнительных полюсов статора расположены по линии электрической нейтрали статора и включены последовательно со щетками и обмоткой якоря (рис. 3.7 – 3.8).
Рис. 3.8. Компенсация реакции якоря в ДПТ
с дополнительными полюсами статора
Зазор между дополнительными полюсами статора и якорем больше, чем зазор между якорем и основными полюсами статора, за счет влияния щеток. Дополнительные полюсы нейтрализуют реакцию якоря в зоне щеток коллектора за счет дополнительного магнитного потока ФД,
что приводит к уменьшению искрения в щетках и, соответственно, уменьшает вероятность выхода из строя щеточно-коллекторного узла;
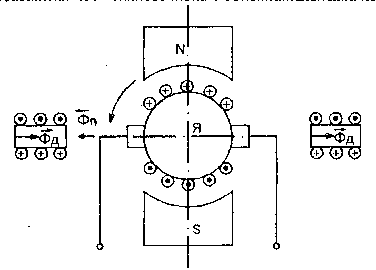
3)  в 1885 г. Менгес изобрел двигатель постоянного тока с компенсационными обмотками (рис. 3.9).
в 1885 г. Менгес изобрел двигатель постоянного тока с компенсационными обмотками (рис. 3.9).
Рис. 3.9. Схема ДПТ с компенсационными обмотками статора:
1 – витки обмотки якоря; 2 – витки основной обмотки возбуждения (основной обмотки статора); 3 – витки
компенсационной обмотки статора
На рис. 3.10 показана упрощенная схема включения компенсационных обмоток.
Рис. 3.10. К пояснению принципа действия ДПТ с компенсационными обмотками
Направление включения компенсационных обмоток статора и обмоток якоря – магнито-встречное, поэтому при любом токе компенсационная обмотка статора призвана компенсировать реакцию якоря – магнитный поток ФП.
Витки компенсационных обмоток статора параллельны основной обмотке статора, они проходят через сверления в статоре.
В конструктивном отношении схема является не очень
удачной, поскольку компенсационная обмотка хорошо компенсирует магнитный поток якоря в зоне полюсов статора, но в зоне щеток подобная компенсация менее эффективна. Поэтому в двигателях постоянного тока применяется комбинация двух последних методов уменьшения реакции якоря.
Электромеханическая и механическая характеристики ДПТ независимого возбуждения
Определяются следующими соотношениями:
ω = f ( I ); (3.2)
ω = f ( M ), (3.3)
где (3.2) – выражение электромеханической характеристики; (3.3) – выражение механической характеристики ЭП.
Характеристики (3.2) и (3.3) обычно выводятся следующим образом. За основу принимают уравнение цепи якоря:
U = E + R∙I, (3.4)
где U – подводимое напряжение; Е – ЭДС якоря; R –
омическое сопротивление цепи якоря.
Необходимые допущения:
1) пренебрегают индуктивной составляющей сопротивления;
2) считают, что поперечная реакция якоря отсутствует;
3) считают, что момент на валу равен электромагнитному моменту.
Из третьего условия выводят искомые характеристики, полагая, что:
Е = СE ∙ ω; (3.5)
М = СМ ·I, (3.6)
где СЕ – постоянная электропривода по ЭДС; СM –
постоянная электропривода по моменту.
При этом в системе СИ численные значения постоянных равны:
СЕ = CM = k∙Ф, (3.7)
где k – конструктивная постоянная, зависящая от числа полюсов; Ф – магнитный поток статора.
На основе выражений (4.4) и (4.5) получают выражение:
CE ×w = U - R × I.
Из выражения (3.8) имеем:
(3.8)
| C C |
R × I.
(3.9)
E E
Выражение (3.9) – уравнение электромеханической характеристики.
Выразим ток I из формулы (3.6) и вставим в соотношение (3.9):
w = U - R × M .
(3.10)
C C ×C
E E M
Получили выражение (3.10) – уравнение механической характеристики. Иногда в уравнения (3.9) – (3.10) вставляют вместо СЕ и СM выражение (3.7) и получают:
w = U k ×F
- R k ×F
× I ;
(3.9′)
w = U k ×F
- R
(k ×F)2
× M .
(3.10′)
Проведем обратное преобразование: приведем механическую характеристику к электромеханической характеристике.
В формулу (3.6) вставим выражение (3.7), получим:
M = k∙Ф∙I, (3.11)
В формулу (3.10′) вставим (3.11), после преобразования будем иметь:
w = U k ×F
- R k ×F
× I .
(3.12)
 Внешний вид (для случая k∙Φ = const) естественных механической и электромеханической характеристик ДПТ НВ приведен на рис. 3.11.
Внешний вид (для случая k∙Φ = const) естественных механической и электромеханической характеристик ДПТ НВ приведен на рис. 3.11.
Рис. 3.11. Естественные механическая и электромеханическая характеристики ДПТ с НВ
Режимы торможения ДПТ
Торможение ЭП может быть обусловлено разными причинами:
- естественным торможением при отсутствии питания;
- аварийной остановкой;
- программной работой ЭП.
Способы торможения якоря двигателя постоянного тока:
1) применение механических тормозов;
2) торможение за счет трения в опорах якоря при естественном выбеге при отключении питания;
3) торможение противовключением, когда якорь или
обмотка возбуждения переключаются на питание напряжением, имеющим обратную полярность;
4) динамическое торможение, когда обмотка якоря ЭД закорачивается сама на себя, а обмотка возбуждения
продолжает оставаться подключенной к цепи питания постоянным током;
5) рекуперативное торможение – это генераторный режим, при котором энергия возвращается в сеть;
6) регенеративное торможение – это генераторный режим, при котором энергия накапливается в аккумуляторах электрической энергии.
Основой для рассмотрения этих режимов являются уравнения ЭП с ДПТ НВ:
T × dw + w= U
- R × MC ;
(3.13)
dt CE CM ×CE
T × dI + I = MC . dt CM
(3.14)
Режим динамического торможения
Рассмотрим режим торможения якоря ДПТ с НВ (рис. 3.12) при U = 0 по укороченному уравнению (3.13):
T × dw + w = -
R × MC ;
(3.15)
dt CM ×CE
T × dw +w = 0. dt
(3.16)
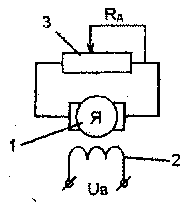
Рис. 3.12. Режим динамического торможения ДПТ НВ: 1 – якорь; 2 – обмотка возбуждения; 3 – резистор
Уравнение (3.16) применяют в том случае, если можно пренебречь моментом сопротивления МС. Уравнения (3.15) и (3.16) отличаются между собой тем, что уравнение (3.15)
аналитически решить не удается (это связано с тем, что МС –
сложная функция скорости, а иногда и угла).
Пусть МС = const, тогда задача имеет аналитическое решение.
Берем начальные условия: t0 = 0, ω(0) = ω . Решение уравнения (3.15) имеет вид:
w = - R × M C
CM ×CE
t
-
+ C ×e T .
(3.17)
Используем начальные условия для определения постоянной интегрирования C:
w* = -
R × M C
+ C;
(3.18)
C ×C
C = w* +
M E
R × M C ;
(3.19)
C ×C
w = -
R ×M C
M E
æ
+ w* +
R × MC
ö - t
× e T ;
(3.20)
ç ÷
CM × CE è CM ×CE ø
| t |
w( t ) = C ×ç1- e T ÷ + w* ×e T .
(3.21)
CM ×CE è ø
Время торможения tT якоря двигателя определяется из условия:
ω( tT ) = 0. (3.22)
При этом надо иметь в виду, что электромеханическая
постоянная времени равна:
Имеем:
( R + R ) × J
T = Д . CE ×CM
0 = U = I (R + RД )+ CE × w;
(3.23)
(3.24)
I = CE ×w ,
R + RД
(3.25)
где ω определяется из решения (3.20).
Торможение противовключением
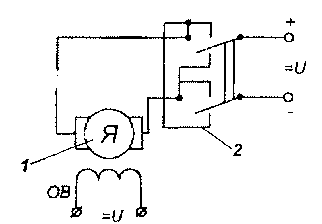 В момент начала этого режима происходит реверсирование напряжения питания с помощью переключателя, знак момента, создаваемого двигателем, меняется, и происходит торможение (рис. 3.13).
В момент начала этого режима происходит реверсирование напряжения питания с помощью переключателя, знак момента, создаваемого двигателем, меняется, и происходит торможение (рис. 3.13).
Рис. 3.13. Электрическая схема соединений при торможении ДПТ НВ противовключением:
1 – двигатель; 2 – переключатель
Для того чтобы двигатель остановился, нужна следящая система, которая в момент ω = 0 отключит питание. Уравнение движения для этого случая имеет вид:
T × dw +w = - U - R ×M .
(3.26)
dt C C ×C C
E M E
Начальные условия: t = 0; ω = ω*; MC = 0. Тогда:
T × dw +w = - U . dt C
(3.27)
Решение уравнения (3.27):
t
w = C × eT
E
-w0 ,
(3.28)
| C |
| 0 |
E
(3.29)
В начальный момент времени:
ω0 = C – ω0; С = 2∙ω0. (3.30)
Подставим выражения (3.30) в решение (3.28):
w = 2 × w0 × e
- t
T - w0 ,
(3.31)
Для режима торможения ДПТ противовключением статических характеристик не существует, т.к. этот режим – динамический.
Определим время торможения:
-tT
| T |
-w0 ,
(3.32)
- tT
e T
1
= 2 ; tT
= T × ln2 » 0,693× T.
При СM =СЕ = 0,1; R = 0,5 Ом; J = 1·10 –4 кг·м2 получаем:
J × R
T =
= 5×10-3 c ; t
= 3,4 ×10-3 c.
C × C T
E M
Режим торможения противовключением является эффективным, но требуется применение сложной следящей системы. Поэтому часто стараются применять режим естественного механического торможения, когда двигатель
останавливается за счет естественного момента МC, или же момента МC, искусственно созданного, когда с помощью тормоза к ротору прикладывается большой момент сил трения.
Режим естественного торможения
Пусть в уравнении (3.26) U = 0. Тогда:
| ×C |
| M E |
× M C .
(3.33)
Решение данного уравнения при постоянном моменте сопротивления имеет вид:
t R × M
w = C ×eT - C .
CM ×CE
(3.34)
При t0 = 0, ω(0) = ω*:
w* = C -
R ×M C .
(3.35)
C ×C
M E
Определим постоянную интегрирования:
C = w* +
R × M C .
(3.36)
C ×C
M E
Тогда из уравнения (4.34) следует:
t
æ
w = w* +
R × M C
ö
× eT -
R × MC .
(3.37)
ç ÷
è CM ×CE ø
CM ×CE
Время торможения tT определим из условия, что при t = tT ω(tT) = 0. Тогда из уравнения (3.33) находим:
| × C |
| M E |
dw = - R
× M C .
× MC .
(3.38)
(3.39)
| M E |
w = w* - R × MC × t ;
(3.40)
C ×C T T
w* =
M E
R × MC × t .
(3.41)
C × C T T
M E
Из последней формулы видно, что чем больше момент сопротивления МС, тем быстрее остановится двигатель (время торможения tT меньше).
Получим рабочую формулу для определения времени
торможения:
U = w* = R × M C × t ,
(3.42)
C C ×C T T
E M E
откуда находим:
| C |
×T.
(3.43)
Пример. Пусть U = 10 B; СM = 0,1 Н·м/A;MC = 0,01 Н·м; T =
0,02 с; R = 2 Ом, тогда получаем:
t = U ×CM ×T = 10× 0,1 × 0, 02 = 1 c.
| C |
2× 0,01
Таким образом, в сравнении с режимом торможения методом противовключения время естественного
торможения почти на два порядка больше. При искусственном торможении выведенные выше формулы справедливы, а момент сопротивления МС во много раз больше.
Способы регулирования скорости вращения
Необходимость изменения скорости предопределяется назначением электропривода.
Теоретической основой для вывода соотношений, определяющих процесс регулирования угловой скорости вала ДПТ НВ, является уравнение движения вала по угловой скорости:
T × dw +w = U - R × M .
(3.44)
dt C C ×C C
E M E
Для установившегося режима имеем:
w = U - R × M .
(3.45)
C C ×C C
E M E
Введем в соотношение (3.45) следующие обозначения:
U
C = w0 ;
MC = I. C
(3.46)
E M
Тогда:
R
w = w0 - C
× I.
(3.47)
Кроме того:
E
СЕ = k∙Φ( IB ); (3.48)
СM = k∙Φ( IB ). (3.49)
Соотношения (3.45), (3.47) – (3.49) определяют основные способы регулирования скорости:
1) изменением напряжения на якоре U – (3.45);
2) изменением момента сопротивления МC – (3.45);
3) изменением сопротивления якорной цепи R – (3.47);
4) изменением тока в обмотке возбуждения IB – (3.48), (3.49):
а) регулированием напряжения возбуждения;
б) регулированием сопротивления цепи возбуждения. В большинстве ЭП скорость изменяется ступенчато.
Изменение скорости вращения вала ДПТ c НВ изменением магнитного потока в магнитопроводе
Данный способ находит широкое применение в ЭП из-за простоты реализации и экономичности, т.к. регулирование осуществляется в относительно маломощной цепи обмотки возбуждения (ОВ) и не сопровождается большими потерями мощности.
Магнитный поток Ф в этом случае уменьшается по сравнению с рабочим значением Фном за счет снижения тока возбуждения IB. Повышать магнитный поток Ф свыше номинального значения нецелесообразно из-за возможности перегрева ОВ. Кроме того, двигатель рассчитан и сконструирован так, что его магнитная система близка к насыщению.
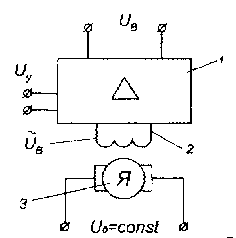 Регулирование тока осуществляется включением добавочного резистора в цепь ОВ или питанием ОВ от управляемого выпрямителя (рис. 3.14).
Регулирование тока осуществляется включением добавочного резистора в цепь ОВ или питанием ОВ от управляемого выпрямителя (рис. 3.14).
Рис. 3.14. Схема регулирования скорости вращения вала ДПТ с НВ за счет OB (UB = var):
1 – усилитель в цепи обмотки возбуждения; 2 – обмотка возбуждения; 3 – якорь двигателя; Uy – напряжение
управления; UB – напряжение возбуждения
Выходное напряжение UB регулируется в управляемом выпрямителе напряжением управления Uy . Эта схема регулирует ток возбуждения в широких пределах в мощных двигателях, работающих в замкнутых ЭП. Она реверсирует ток возбуждения IB при реверсивном выпрямителе.
Рассмотрим данный способ регулирования более
подробно:
CM = k∙Ф = СЕ; (3.50)
Ф = Ф(IВ, W), (3.51)
где W – число витков в первичной обмотке;
IB – ток возбуждения. Следовательно:
w = U k ×F
- R
(k ×F)2
× MC ;
(3.52)
w = U k ×F
- R k ×F
× I .
(3.53)
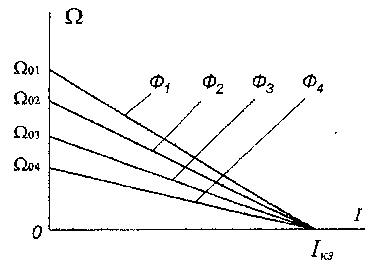
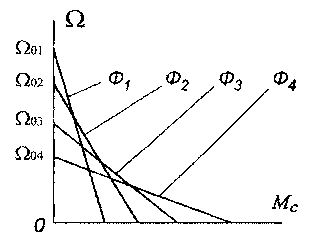
Регулировочные характеристики ω(I), ω(МС) имеют вид прямых линий (рис. 3.15 – 3.16).
На рис. 3.15 обозначено:
w = U
| i |
( i = 1, 2, 3,...)
(3.54)
| ω |
| ω01 ω02 ω03 ω04 |
| I |
| Iкз |
Ф1 < Ф2 < Ф3 <…
Рис. 3.15. Электромеханические регулировочные характеристики ДПТ НВ
При малых значениях UB~ вращающий момент уменьшается, следовательно, в работе электропривода будет наблюдаться неравномерность вращения вала.
| ω |
| ω01 ω02 ω03 ω04 |
| М |
| МС |
Способ регулирования скорости вращения путем изменения потока возбуждения является ограниченным по диапазону скоростей (глубина регулирования – 3-4 раза).
Способ регулирования скорости, основанный на изменении напряжения, подводимого к якорю ДПТ
Этот способ широко используется для регулирования любых координат ЭП при обеспечении высоких требований к показателям его качества. По этой причине он является основным.
Из формул (3.52) – (3.54) видно, что при неизменном магнитном потоке Ф изменение U приводит к изменению скорости холостого хода. Это дает изменение скорости вращения электропривода и под нагрузкой:
ωн = (0, 96...0, 98) · ω0. (3.55)
Формула (3.55) соответствует нерегулируемому ЭП. На практике чаще всего приходится иметь дело с необходимостью регулирования угловой скорости ω в широких пределах.
Схема включения ЭП будет иметь вид, показанный на рис. 3.17.
Коэффициент усиления по напряжению:
U
| U |
y
(3.56)
где U – напряжение, подводимое к якорю; Uy –
 управляющее напряжение.
управляющее напряжение.
Рис. 3.17. Схема включения ДПТ с НВ в цепь с регулируемым напряжением якоря (Uя = var):
1 – усилитель цепи якоря; 2 – обмотка возбуждения;
3 – якорь
Напряжение Uy может изменяться по некоторому закону:
Uy = U y (t) .
Данный способ является наиболее эффективным.
(3.57)
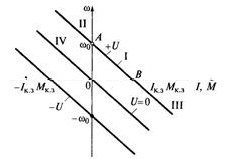
Электромеханические ω(I) и механические ω(MC)
характеристики имеют одинаковый вид (рис. 3.18): На рис. 3.18 обозначено:
Ui
w0.i = k ×F ( i = 1,2,3,...);
UB1 >UB2 >UB3 >…
(3.58)
Каждая характеристика соответствует постоянным
значениям напряжения возбуждения UB1,UB2,UB3,…
Данный способ регулирования скорости позволяет изменять ее в сотни раз. Его обычно используют совместно с предыдущим способом.
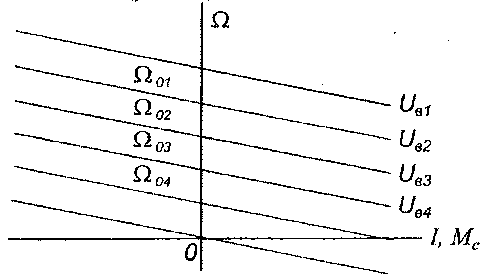
| ω |
| ω01 ω02 ω03 ω04 |
| 0 |
| UВ1 UВ2 UВ3 UB4 I, MC |
Рис. 3.18. Электромеханические ω(I) и механические ω(MC) характеристики ДПТ НВ
Задание № 2
Данные, используемые для расчета задания № 2, приведены в табл. 1 – 2.
Для электродвигателя постоянного тока параллельного возбуждения, технические данные которого приведены в табл. 2, при напряжении питающей сети U = 220 B, 127 B, 110 B и 100 B:
1. Начертить электрическую схему с пусковым реостатом в цепи якоря и регулировочным реостатом в цепи возбуждения.
2. Определить величину сопротивления регулировочного реостата Rр, обеспечивающего ослабление магнитного потока
до величины Ф = 0,76·Ф
ном.
3. Определить величину сопротивления пускового
реостата при кратности пускового тока якоря КI = Iп / Iя ном, заданной в табл. 2.
4. Построить на одном графике естественную механическую характеристику и искусственную при Ф = 0,76·Фном и Rп = 0 (воспользоваться данными табл. 1).
5. Построить на одном графике естественную механическую характеристику и искусственную при Фном и введенном сопротивлении пускового реостата Rп .
6. Ответить на вопросы, указанные в табл. 2.
7. Определить номинальный ток плавкой вставки в предохранителях, защищающих ответвление к ЭД, и выбрать сечение проводов для питания ЭД, номинальные данные которого приведены в табл. 2.
Рекомендации по выполнению задания № 2
Сначала определим сопротивление обмотки возбуждения
Rв = Uном / Iв. ном , Ом. (1) Для расчета сопротивления Rр регулировочного реостата найдем вначале ток в обмотке возбуждения, соответствующий ослабленному магнитному потоку Ф = 0,78·Фном. С этой целью обычно используют универсальную
кривую намагничивания двигателей постоянного тока, заданную в табл. 1.
| ном |
0,78 отношение Iв / Iв.ном = 0,55.
Тогда можно определить ток обмотки возбуждения:
Iв = 0,55 · Iв.ном, A. (2) Общее сопротивление цепи возбуждения
Rо = Rв + Rр = U ном / Iв , Ом. (3)
Таблица 1
| Iв / Iв.ном | 0 | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 |
| Ф/ Фном | 0 | 0,2 | 0,4 | 0,55 | 0,67 | 0,75 | 0,81 |
| Iв / Iв.ном | 0 | 0,7 | 0,8 | 0,9 | 1,0 | 1,1 | 1,2 |
| Ф/ Фном | 0 | 0,87 | 0,92 | 0,94 | 1,0 | 1,04 | 1,08 |
Сопротивление регулировочного реостата в цепи возбуждения
Rр = (U ном / Iв) – R в, Ом. (4)
Для номинального режима работы двигателя найдем следующие величины:
- ток в цепи якоря
Iя. ном = Iном – I в.ном, А; (5)
- ЭДС якоря
- момент
Ея. ном = Uном – R я × Iя. ном, В ; (6)
М ном = 9550 × (Р ном / n ном), Н×м. (7) Механические характеристики двигателя с параллельным возбуждением представляют собой линейные зависимости и
строятся по двум точкам.
Рассчитаем координаты двух точек для естественной характеристики:
1) в режиме холостого хода при М = 0 частота вращения
n0 = Uном / (Се × Ф ном) = (Uном / Ея. ном) × n ном , мин–1;
2) при номинальной нагрузке
М = Мном , n = nном .
Естественная механическая характеристика построена на рис. 1 в виде сплошной прямой.
Рассчитаем координаты двух точек для построения искусственной характеристики:
1) в режиме холостого хода при М = 0 частота вращения
якоря при ослабленном магнитном потоке Ф = 0,78· Ф
n
ном
–1
0 = Uном /(Се × Ф ) = Uном /(0,78 ×Се × Ф ном), мин ;
2) при номинальной нагрузке М = М ном
n = Е
/(0,78 × С × Ф ) = [(U
– R × I
)/(0,78 × Е )] × n ,
я
мин–1,
е ном
ном
я я.
я. ном
ном
| я ном м ном я. ном |
Искусственная характеристика построена на рис. 1 штриховой линией.
Так как в момент пуска ЭДС якоря Ея = 0 , то пусковой
ток
Iп = Uном / R я , А.
Сопротивление пускового реостата определяется из
равенства
Отсюда
Iп = КI ∙Iя. ном = U ном / (R я + R п).
R п = [Uном / (КI ∙Iя. ном)] – R я , Ом. (8)
Искусственную механическую характеристику также
строим по двум точкам:
1) в режиме холостого хода при М = 0 частота вращения
n0 = Uном / (Се × Ф ном), мин–1;
2) при номинальной нагрузке М = М ном частота вращения
n = Ея / (Се × Ф ном) = nном [Uном – (R я + R п) × Iя. ном ] / Ея .ном , мин–1 .
Искусственная механическая характеристика построена
на рис. 1 штрихпунктирной линией для ДПТ НВ с n0 = 3000 мин–1.
Для определения номинального тока плавкой вставки предохранителей, защищающих ответвление к ДПТ, определим номинальный ток двигателя:
n, мин−1
Iя. ном
= Pном
| × h |
| U |
(9)
1000
500
М, Н·м
0
Рис. 1. Естественная и искусственные механические
характеристики
Пусковой ток
Ток плавкой вставки
Iп = Кп × Iном. (10)
Iвс = Iп / 2,5. (11)
К установке по справочнику выбираем предохранитель на номинальный ток плавкой вставки Iвс.ном.
Допустимая нагрузка на провод по условию нагревания
длительным расчетным током
Iдоп ³ Iдл , где Iдл = Iном. (12) По табл. 3.6 – 3.7 выбираем три одножильных провода с алюминиевыми жилами, проложенных в одной трубе, для которых известна допустимая токовая нагрузка Iдоп.
Проверяем выбранное сечение по условию соответствия
аппарату максимально-токовой защиты:
Iдоп ³ Кзащ × Iзащ , (13) где Кзащ – коэффициент защиты (для линий, идущих к АД, установленным в невзрывоопасных помещениях, Кзащ = 0,33).
Условие выполняется.
Таблица 2
Варианты задания № 2
| Шифр | U, В | Номер вопро- са. | КI | Технические данные двигателя | ||||
| Рном , кВт | nном , мин –1 | R я , Ом | R в , Ом | Iном , А | ||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 00 | 127 | 11,21 | 2,8 | 8 | 1000 | 0,395 | 168 | 48 |
| 01 | 220 | 1, 30 | 2,5 | 1,5 | 3000 | 1,9 | 600 | 9 |
| 02 | 220 | 3, 28 | 2,4 | 1,5 | 1500 | 2,45 | 470 | 8,7 |
| 03 | 220 | 5, 26 | 2,3 | 2,2 | 1500 | 1,205 | 358 | 12 |
| 04 | 220 | 7, 24 | 2,2 | 2,2 | 3000 | 1,03 | 712 | 12,5 |
| 05 | 220 | 9, 22 | 2,1 | 3,2 | 3000 | 0,642 | 285 | 17,5 |
| 06 | 127 | 11,20 | 2,0 | 4,5 | 1000 | 0,632 | 184 | 25,2 |
| 07 | 220 | 13,18 | 1,9 | 4,5 | 1500 | 0,78 | 228 | 25,4 |
| 08 | 220 | 15,16 | 1,8 | 4,5 | 3000 | 0,352 | 270 | 24,3 |
| 09 | 220 | 17,14 | 1,9 | 6 | 1500 | 0,472 | 132 | 33,2 |
| 10 | 127 | 19,12 | 2,0 | 6 | 1000 | 0,494 | 158 | 32,6 |
| 11 | 220 | 21,10 | 2,1 | 6,2 | 3000 | 0,36 | 280 | 33 |
| 12 | 220 | 23, 8 | 2,2 | 6,6 | 2200 | 0,303 | 368 | 35 |
| 13 | 127 | 25, 6 | 2,3 | 8 | 1000 | 0,328 | 136 | 43 |
| 14 | 220 | 27, 4 | 2,4 | 9 | 1500 | 0,240 | 282 | 48 |
| 15 | 127 | 29, 2 | 2,5 | 10 | 1000 | 0,300 | 85 | 63 |
| 16 | 110 | 4, 15 | 2,4 | 10 | 750 | 0,357 | 92,5 | 58 |
| 17 | 127 | 6, 17 | 2,3 | 12,5 | 1000 | 0,237 | 108 | 76 |
| 18 | 110 | 8, 20 | 2,2 | 14 | 750 | 0,244 | 92 | 79 |
| 19 | 110 | 17, 8 | 1,7 | 17 | 750 | 0,157 | 73,3 | 93 |
| 20 | 100 | 19, 6 | 1,9 | 19 | 600 | 0,198 | 44 | 106 |
| 21 | 127 | 21, 2 | 2,1 | 20,5 | 970 | 0,086 | 115 | 110 |
| 22 | 110 | 10,17 | 1,8 | 25 | 750 | 0,102 | 44 | 136 |
| 23 | 110 | 12,15 | 2,0 | 25 | 600 | 0,111 | 48,4 | 136 |
| 24 | 110 | 14,13 | 2,1 | 32 | 750 | 0,102 | 44 | 136 |
| 25 | 100 | 16,11 | 2,2 | 42 | 600 | 0,111 | 48,4 | 136 |
| 26 | 127 | 18, 9 | 2,3 | 55 | 600 | 0,036 | 32,5 | 287 |
| 27 | 110 | 20, 7 | 2,4 | 70 | 600 | 0,0202 | 24 | 361 |
| 28 | 220 | 22,17 | 2,2 | 3,2 | 1500 | 1,03 | 198 | 18,4 |
| 29 | 110 | 24,15 | 2,1 | 12,0 | 730 | 0,20 | 94 | 65 |
| 30 | 127 | 26,13 | 2,0 | 24,0 | 1060 | 0,05 | 70 | 124 |
| 31 | 220 | 1, 30 | 2,5 | 1,5 | 3000 | 1,9 | 600 | 9 |
Продолжение табл. 2
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 32 | 220 | 3,28 | 2,4 | 1,5 | 1500 | 2,45 | 470 | 8,7 |
| 33 | 220 | 5,26 | 2,3 | 2,2 | 1500 | 1,205 | 358 | 12 |
| 34 | 220 | 7,24 | 2,2 | 2,2 | 3000 | 1,03 | 712 | 12,5 |
| 35 | 220 | 9,22 | 2,1 | 3,2 | 3000 | 0,642 | 285 | 17,5 |
| 36 | 127 | 11,20 | 2,0 | 4,5 | 1000 | 0,632 | 184 | 25,2 |
| 37 | 220 | 13,18 | 1,9 | 4,5 | 1500 | 0,78 | 228 | 25,4 |
| 38 | 220 | 15,16 | 1,8 | 4,5 | 3000 | 0,352 | 270 | 24,3 |
| 39 | 220 | 17,14 | 1,9 | 6 | 1500 | 0,472 | 132 | 33,2 |
| 40 | 127 | 19,12 | 2,0 | 6 | 1000 | 0,494 | 158 | 32,6 |
| 41 | 220 | 21,10 | 2,1 | 6,2 | 3000 | 0,36 | 280 | 33 |
| 42 | 220 | 23,8 | 2,2 | 6,6 | 2200 | 0,303 | 368 | 35 |
| 43 | 127 | 25,6 | 2,3 | 8 | 1000 | 0,328 | 136 | 43 |
| 44 | 220 | 27,4 | 2,4 | 9 | 1500 | 0,240 | 282 | 48 |
| 45 | 127 | 29,2 | 2,5 | 10 | 1000 | 0,300 | 85 | 63 |
| 46 | 110 | 4,15 | 2,4 | 10 | 750 | 0,357 | 92,5 | 58 |
| 47 | 127 | 6,17 | 2,3 | 12,5 | 1000 | 0,237 | 108 | 76 |
| 48 | 110 | 8,20 | 2,2 | 14 | 750 | 0,244 | 92 | 79 |
| 49 | 110 | 17,8 | 1,7 | 17 | 750 | 0,157 | 73,3 | 93 |
| 50 | 100 | 19,6 | 1,9 | 19 | 600 | 0,198 | 44 | 106 |
| 51 | 127 | 21,2 | 2,1 | 20,5 | 970 | 0,086 | 115 | 110 |
| 52 | 110 | 10,17 | 1,8 | 25 | 750 | 0,102 | 44 | 136 |
| 53 | 110 | 12,15 | 2,0 | 25 | 600 | 0,111 | 48,4 | 136 |
| 54 | 110 | 14,13 | 2,1 | 32 | 750 | 0,102 | 44 | 136 |
| 55 | 100 | 16,11 | 2,2 | 42 | 600 | 0,111 | 48,4 | 136 |
| 56 | 127 | 18,9 | 2,3 | 55 | 600 | 0,036 | 32,5 | 287 |
| 57 | 110 | 20,7 | 2,4 | 70 | 600 | 0,0202 | 24 | 361 |
| 58 | 220 | 22,17 | 2,2 | 3,2 | 1500 | 1,03 | 198 | 18,4 |
| 59 | 110 | 24,15 | 2,1 | 12,0 | 740 | 0,20 | 94 | 65 |
| 60 | 127 | 26,13 | 2,0 | 24,0 | 1060 | 0,05 | 70 | 124 |
| 61 | 110 | 14,13 | 2,1 | 32 | 750 | 0,102 | 44 | 136 |
| 62 | 100 | 16,11 | 2,2 | 42 | 600 | 0,111 | 48,4 | 136 |
| 63 | 220 | 22,17 | 2,2 | 3,2 | 1500 | 1,03 | 198 | 18,4 |
| 64 | 127 | 18,9 | 2,3 | 55 | 600 | 0,036 | 32,5 | 287 |
| 65 | 110 | 14,13 | 2,1 | 32 | 750 | 0,102 | 44 | 136 |
| 66 | 100 | 16,11 | 2,2 | 42 | 600 | 0,111 | 48,4 | 136 |
О кончание табл. 2
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 67 | 220 | 2,30 | 1,5 | 2,5 | 2000 | 2,9 | 800 | 19 |
| 68 | 220 | 1,30 | 2,5 | 1,5 | 3000 | 1,9 | 600 | 9 |
| 69 | 220 | 3,28 | 2,4 | 1,5 | 1500 | 2,45 | 470 | 8,7 |
| 70 | 220 | 5,26 | 2,3 | 2,2 | 1500 | 1,205 | 358 | 12 |
| 71 | 220 | 7,24 | 2,2 | 2,2 | 3000 | 1,03 | 712 | 12,5 |
| 72 | 220 | 9,22 | 2,1 | 3,2 | 3000 | 0,642 | 285 | 17,5 |
| 73 | 127 | 11,20 | 2,0 | 4,5 | 1000 | 0,632 | 184 | 25,2 |
| 74 | 220 | 13,18 | 1,9 | 4,5 | 1500 | 0,78 | 228 | 25,4 |
| 75 | 220 | 15,16 | 1,8 | 4,5 | 3000 | 0,352 | 270 | 24,3 |
| 76 | 220 | 17,14 | 1,9 | 6 | 1500 | 0,472 | 132 | 33,2 |
| 77 | 127 | 19,12 | 2,0 | 6 | 1000 | 0,494 | 158 | 32,6 |
| 78 | 220 | 21,10 | 2,1 | 6,2 | 3000 | 0,36 | 280 | 33 |
| 79 | 220 | 23,8 | 2,2 | 6,6 | 2200 | 0,303 | 368 | 35 |
| 80 | 127 | 25,6 | 2,3 | 8 | 1000 | 0,328 | 136 | 43 |
| 81 | 220 | 27,4 | 2,4 | 9 | 1500 | 0,240 | 282 | 48 |
| 82 | 127 | 29,2 | 2,5 | 10 | 1000 | 0,300 | 85 | 63 |
| 83 | 110 | 4,15 | 2,4 | 10 | 750 | 0,357 | 92,5 | 58 |
| 84 | 127 | 6,17 | 2,3 | 12,5 | 1000 | 0,237 | 108 | 76 |
| 85 | 110 | 8,20 | 2,2 | 14 | 750 | 0,244 | 92 | 79 |
| 86 | 110 | 17,8 | 1,7 | 17 | 750 | 0,157 | 73,3 | 93 |
| 87 | 100 | 19,6 | 1,9 | 19 | 600 | 0,198 | 44 | 106 |
| 88 | 127 | 21,2 | 2,1 | 20,5 | 970 | 0,086 | 115 | 110 |
| 89 | 110 | 10,17 | 1,8 | 25 | 750 | 0,102 | 44 | 136 |
| 90 | 110 | 12,15 | 2,0 | 25 | 600 | 0,111 | 48,4 | 136 |
| 91 | 110 | 14,13 | 2,1 | 32 | 750 | 0,102 | 44 | 136 |
| 92 | 100 | 16,11 | 2,2 | 42 | 600 | 0,111 | 48,4 | 136 |
| 93 | 127 | 18,9 | 2,3 | 55 | 600 | 0,036 | 32,5 | 287 |
| 94 | 110 | 20,7 | 2,4 | 70 | 600 | 0,0202 | 24 | 361 |
| 95 | 220 | 22,17 | 2,2 | 3,2 | 1500 | 1,03 | 198 | 18,4 |
| 96 | 110 | 24,15 | 2,1 | 12,0 | 740 | 0,20 | 94 | 65 |
| 97 | 127 | 26,13 | 2,0 | 24,0 | 1060 | 0,05 | 70 | 124 |
| 98 | 110 | 28,15 | 2,1 | 12,0 | 760 | 0,20 | 95 | 66 |
| 99 | 100 | 16,15 | 2,2 | 36,0 | 600 | 0,15 | 48,8 | 136 |
Вопросы к пункту 6 задания № 2
1. Каково назначение дополнительных полюсов и компенсационной обмотки машины постоянного тока?
2. Какие условия нужно выполнить, чтобы произошло самовозбуждение генератора постоянного тока параллельного и последовательного возбуждения?
3. Для чего в цепи обмотки якоря при пуске двигателя необходимо включать дополнительные сопротивления?
4. Почему нельзя включать в сеть двигатель последовательного возбуждения без нагрузки? Каким при этом должно быть соединение двигателя с рабочим механизмом?
5. Назовите основные части машины постоянного тока и поясните их конструкцию.
6. Каково назначение коллектора у генератора и двигателя?
7. Каким образом можно регулировать ЭДС генератора?
8. Объясните влияние реакции якоря на величину ЭДС машины постоянного тока.
9. Поясните сущность коммутации машины постоянного тока.
10. Как уменьшить вредное влияние реакции якоря на работу машины постоянного тока?
11. Чем определяется конечное напряжение, до которого самовозбуждается генератор с параллельным возбуждением?
12. Каковы достоинства и недостатки генератора с
последовательным возбуждением?
13. Каковы особенности внешней характеристики генератора с параллельным возбуждением?
14. Какой вид имеет внешняя характеристика генератора со смешанным возбуждением при согласном и встречном включении обмоток возбуждения?
15. Поясните, как осуществляется регулирование частоты вращения двигателя с параллельным возбуждением.
16. Как осуществляется регулирование частоты вращения двигателя с последовательным возбуждением?
17. Зачем необходим реостат в цепи якоря двигателя постоянного тока при его запуске?
18. Поясните, почему с увеличением нагрузки частота вращения двигателя последовательного возбуждения уменьшается, а с уменьшением нагрузки – увеличивается.
19. От чего зависит частота вращения двигателя и как ее
можно регулировать?
20. От каких факторов зависит ЭДС генератора смешанного возбуждения?
21. Почему реакция якоря может вызвать искрение под щетками?
22. Почему ток короткого замыкания генератора параллельного возбуждения очень быстро снижается до величин, меньших номинального тока?
23. Что произойдет при обрыве обмотки возбуждения двигателя с параллельным возбуждением, если он работал с номинальным моментом на валу?
24. Что произойдет при обрыве обмотки возбуждения двигателя с параллельным возбуждением, если он работал в режиме холостого хода?
25. Какова распространенная ошибка при подключении
двигателя с параллельным возбуждением к сети? К чему она приводит?
26. Как изменяется частота вращения двигателя с параллельным возбуждением при увеличении нагрузки?
27. Приведите схему реостатного пуска двигателя
постоянного тока параллельного возбуждения, если используется трехступенчатый пусковой реостат.
28. Как скажется снижение напряжения питающей сети на частоте вращения и токе якоря при неизменной нагрузке на валу двигателя параллельного возбуждения?
29. Как скажется снижение напряжения питающей сети на частоте вращения и токе якоря при неизменной нагрузке на валу двигателя последовательного возбуждения?
30. Как зависит пусковой ток двигателя от нагрузки на валу и момента инерции устройства, приводимого во вращение?
Задание № 3
Составить принципиальную электрическую схему управления электродвигателем в соответствии с заданием, указанным в табл. 2, и начертить в соответствии с ГОСТом. Описать работу схемы и ее возможности. Выбрать, применительно к технологическому процессу производства в АПК, пускорегулирующую и защитную аппаратуру. В вариантах с указанием мощности и напряжения электродвигателей выбор пускорегулирующей и защитной аппаратуры обосновать расчетом.
Рекомендации и примеры по выполнению задания № 3
Электрические машины, аппараты и устройства управления ими изображают на схемах условными обозначениями (ГОСТ 2.755–87). Некоторые обозначения релейно-контактных элементов управления ЭП приведены в табл. 1.
Каждая схема управления электроприводом имеет две электрические цепи: силовую, выделяемую обычно жирными линиями, и цепь управления – тонкими линиями. Аппараты в соответствии с их функциями обозначаются буквами согласно СТ СЭВ 2182–80, например: КМ – главный контактор, QF – автоматический выключатель, F – плавкий предохранитель, КК – реле тепловое, КА – реле токовое, КТ – реле времени, КV – реле напряжения, S – кнопка, SQ – путевой выключатель и т.д.
Элементы одного устройства принято показывать в
разных электрических цепях в зависимости от их функционального назначения, например: обмотка контактора включена в цепь управления, главные контакты этого контактора – в силовую цепь, а вспомогательные контакты – в цепь управления. Однако все элементы аппарата должны иметь одинаковые буквенные и цифровые обозначения. На схемах все элементы (контакты, кнопки и т.п.) показывают при отсутствии токов в обмотках и ненажатых кнопках.
Пример. Для привода трехсекционного транспортера используются три асинхронных двигателя серии 4А, которые для нормальной работы должны включаться и отключаться в определенной последовательности: вкл. 3-2-1, а откл. 1-2-3. Управление двигателями осуществляется контакторами переменного тока и кнопочным постом с 3 кнопками включения и 3 кнопками отключения.
Составить схему управления электродвигателями.
Решение:
1. Схема включения ЭД показана на рис. 1.











| К1 |
| К2 |
| К3 |
| М1 |
| М2 |
| М3 |
С
Рис. 1. Схема включения АД
2. Для нормальной работы транспортера двигатели должны включаться только в следующем порядке: первым – двигатель последней секции М 3, затем – М 2 и последним – двигатель первой секции М 1. При неверной последовательности включения неработающие секции транспортера будут переполнены перемещаемыми деталями. Отключение секций должно обязательно происходить в обратном порядке, т.е. М 1–М 2–М3, чтобы секции успели очиститься.
3. Контактно-релейная схема управления. Так как логика работы двигателей достаточно проста, можно создать схему управления, используя только вспомогательные контакты контакторов и кнопочный пост.






 Таблица 1 Обозначения релейно-контактных элементов управления
Таблица 1 Обозначения релейно-контактных элементов управления
| Обозначение | Наименование |
| Предохранитель плавкий | |
| а) б) | Контакт коммутационного устройства: а) замыкающий б) размыкающий |
| Выключатель трехполюсный | |
| Выключатель автоматический трехполюсный | |
а)
б) 
| Кнопки с самовозвратом а) с замыкающим контактом; б) с размыкающим контактом |

| Контакт главной цепи контактора, пускателя |
а)  б)
б)
| Контакты путевого или концевого выключателя: а) размыкающий б) замыкающий |
| Контакт замыкающий с замедлением а) при замыкании; б) при размыкании | |
| Контакт размыкающий с замедлением: а) при размыкании; б) при замыкании | |
| Катушка контактора, реле, пускателя | |
| Нагревательный элемент теплового реле | |

| Контакт теплового реле с возвратом нажатием кнопки |
1) Логика включения двигателей. Первым можно включить только двигатель М 3. Никаких ограничений на его включение нет. Поэтому схема его включения – стандартная (рис. 2). Двигатель М 2 должен включаться только после М 3. Для этого в цепь катушки К2 последовательно введем вспомогательный замыкающий контакт К3. Двигатель М 1 включается только после М 2. Для этого в цепь катушки К1 введем контакт К2.



| А |
| К3 |
| S1 |
| S2 |
| К3 |
| К2 |
| К2 |
| S3 |
| К3 |
| S4 |
| К2 |
| К1 |
| К1 |
| S5 |
| К2 |
| S6 |
| К1 |
F
Рис. 2. Релейно-контакторная схема управления АД
2) Логика отключения. Первым должен быть отключен двигатель М 1. Ограничений на его отключение нет. Поэтому в цепи катушки К1 предусмотрена только кнопка S6. Двигатель М 2 должен отключаться вторым, после отключения М 1. Поэтому кнопка S4 шунтирована вспомогательным контактом К1. Двигатель М 3 должен отключаться последним, после М 2, поэтому кнопка S2 шунтирована вспомогательным контактом К2. Для защиты цепи управления от коротких замыканий применены плавкие предохранители F.
В качестве примера приведем типовую схему управления
электроприводом: рис. 3 – схема управления, защиты от
перегрузок и коротких замыканий и автоматизированного реостатного пуска асинхронного двигателя с фазным ротором в функции тока [1, с. 468];









| I > |
| A |
| B |
| С |
| N |
| QF KM1 |
| K1 |
| KK2 |
| КК1 КК2 |
| М |
| S1 |
| KM3 |
| KM3 |
| S2 |
| KM1KM1 |
| R`r2 |
| KM1 |
| KM2 |
| KM2 |
| KA2 KA1 KM2 KM1 KM3 KA2 R′r2 |
| I > |
| KA1 |
Рис. 3. Схема управления, защиты и пуска АД с фазным ротором
Таблица 2
Варианты задания № 3
| Шифр | Наименование схемы |
| 1 | 2 |
| 00 | Схема управления и защиты реверсивного трехфазного синхронного двигателя с помощью магнитного и кнопочного пускателей. Предусмотреть защиту от коротких замыканий и перегрузок |
| 01 | Схема управления и защиты нереверсивного трехфазного асинхронного двигателя (АД) с короткозамкнутой обмоткой ротора с помощью магнитного и кнопочного пускателей |
| 02 | Схема автоматического управления пуском АД с фазным ротором (пусковой реостат имеет 5 ступеней регулирования) |
| 03 | Схема автоматического управления пуском двигателя постоянного тока (ДПТ) с НВ |
| 04 | Схема управления и защиты короткозамкнутого АД с помощью реверсивного магнитного пускателя. Предусмотреть возможность управления с четырех мест и защиту от коротких замыканий |
| 05 | Схема управления АД с короткозамкнутой обмоткой ротора и динамическим торможением. Предусмотреть пуск, остановку, защиту от перегрузок и коротких замыканий, динамическое и регенеративное торможение |
| 06 | Схема дистанционного управления (пуск и остановка) АД с четырех мест. Предусмотреть защиту от коротких замыканий и перегрузок |
| 07 | Схема управления и защиты от перегрузок и коротких замыканий для четырех трехфазных АД с короткозамкнутыми роторами. Использовать магнитные пускатели и кнопочные станции, запитать двигатели от общей сети 230 B |
| 08 | Схема автоматического управления пуском АД с фазным ротором. Использовать тр ехступенчатый реостат, предусмотреть защиту от перегрузок |
Продолжение табл. 2
| 1 | 2 |
| 09 | Схема дистанционного управления АД с короткозамкнутым ротором с четырех мест с помощью контактора и кнопочных станций. Обеспечить защиту от коротких замыканий (КЗ) и перегрузок |
| 10 | Схема автоматизированного реостатного пуска ДПТ параллельного возбуждения в функции тока и времени |
| 11 | Схема автоматизированного динамического торможения ДПТ смешанного возбуждения [1, с.470] |
| 12 | Схема электропривода ДПТ последовательного возбуждения от трехфазной сети с помощью диодного преобразователя (выпрямителя с нулевым выводом) |
| 13 | Схема управления и регулирования частоты вращения АД с фазным ротором с помощью тиристорного преобразователя переменного напряжения с двумя встречно-параллельными тиристорами в каждой фазе обмотки статора АД [3, с. 410]. Предусмотреть защиту от КЗ и перегрузок |
| 14 | Схема управления (пуск, остановка) и регулирования частоты вращения АД с фазным ротором с помощью транзисторного преобразователя в цепи ротора. Предусмотреть защиту от КЗ и перегрузок |
| 15 | Схема автоматизированного асинхронного пуска синхронного двигателя [1, с. 470]. Предусмотреть защиту от КЗ и перегрузок |
| 16 | Схема управления и защиты от перегрузок и коротких замыканий трех АД с короткозамкнутым ротором, питаемых от общей трехфазной сети 380 В |
| 17 | Схема дистанционного управления с четырех мест синхронным двигателем. Обеспечить защиту от перегрузок и коротких замыканий |
| 18 | Схема управления АД с короткозамкнутой обмоткой ротора в функции тока и времени. Запитать от трехфазной сети 380 B. Обеспечить защиту от перегрузок и коротких замыканий |
Продолжение табл. 2
| 1 | 2 |
| 19 | Схема автоматизированного реостатного пуска асинхронного двигателя с фазным ротором в функции тока и времени. Предусмотреть защиту от коротких замыканий и перегрузок |
| 20 | Схема автоматизированного реостатного пуска ДПТ смешанного возбуждения в функции скорости [1, с. 468] |
| 21 | Схема управления двумя синхронными двигателями, питаемыми от общей трехфазной сети. Для управления одним из них использовать контактор, другим – магнитный пускатель |
| 22 | Схема управления и защиты АД с короткозамкнутым ротором от коротких замыканий, перегрузок и обрыва фазы с помощью электромагнитного реле тока, реле времени и промежуточного реле |
| 23 | Схема управления двумя АД, питаемыми от общей трехфазной сети. Использовать магнитные пускатели и кнопочные станции. Предусмотреть для одного из них возможность дистанционного управления с трех мест |
| 24 | Схема управления и защиты от перегрузок, обрыва одной фазы и коротких замыканий реверсивного АД с фазным ротором |
| 25 | Схема автоматического управления пуском АД с фазным ротором, трехступенчатый пусковой реостат |
| 26 | Схема дистанционного управления с трех мест и защиты от перегрузок АД с фазным ротором |
| 27 | Схема управления и защиты АД с фазным ротором от перегрузок, используя электромагнитное реле тока |
| 28 | Схема управления и защиты от перегрузок и коротких замыканий АД с короткозамкнутым ротором и АД с фазным ротором, питаемых от трехфазной сети 380 В |
| 29 | Схема дистанционного управления с трех мест и автоматического управления пуском АД с фазным ротором. Использовать пятиступенчатый пусковой реостат |
Продолжение табл. 2
| 1 | 2 |
| 30 | Схема тиристорного электропривода ДПТ от трехфазной сети [3, с. 411] |
| 31 | Схема управления и защиты реверсивного трехфазного АД с короткозамкнутой обмоткой ротора с помощью магнитного пускателя |
| 32 | Схема автоматического управления пуском АД с фазным ротором, используя трехступенчатый пусковой реостат |
| 33 | Схема автоматического управления пуском ДПТ с параллельным возбуждением [4, с. 355] |
| 34 | Схема управления и защиты короткозамкнутого АД с помощью нереверсивного магнитного пускателя. Предусмотреть возможность управления с двух мест |
| 35 | Схема управления АД с короткозамкнутой обмоткой ротора и динамическим торможением. Предусмотреть пуск, остановку, защиту от перегрузок и коротких замыканий, динамическое торможение |
| 36 | Схема дистанционного управления (пуск и остановка) АД с трех мест. Предусмотреть защиту от коротких замыканий и перегрузок |
| 37 | Схема управления и защиты от перегрузок и коротких замыканий для трех трехфазных АД с коротко- замкнутыми роторами. Использовать магнитные пускатели и кнопочные станции, запитать двигатели от общей сети 220 B |
| 38 | Схема автоматического управления пуском АД с фазным ротором. Использовать двухступенчатый реостат, предусмотреть защиту от коротких замыканий и перегрузок |
| 39 | Схема дистанционного управления АД с коротко- замкнутым ротором с двух мест с помощью контактора и кнопочных станций. Обеспечить защиту от КЗ |
| 40 | Схема автоматизированного реостатного пуска ДПТ параллельного возбуждения в функции времени [1, с. 469] |
Продолжение табл. 2
| 1 | 2 |
| 41 | Схема автоматизированного динамического торможения ДПТ параллельного возбуждения [1, с.470] |
| 42 | Схема электропривода ДПТ последовательного возбуждения от трехфазной сети с помощью тиристорного преобразователя (выпрямителя с нулевым выводом) [3, с. 411] |
| 43 | Схема управления и регулирования частоты вращения АД с фазным ротором с помощью тиристорного преобразователя переменного напряжения с двумя встречно-параллельными тиристорами в каждой фазе обмотки статора двигателя [3, с. 410]. Предусмотреть защиту от коротких замыканий |
| 44 | Схема управления (пуск, остановка) и регулирования частоты вращения АД с фазным ротором с помощью тиристорного преобразователя в цепи ротора [3, с. 410]. Предусмотреть защиту от коротких замыканий. |
| 45 | Схема автоматизированного асинхронного пуска синхронного двигателя [1, с. 470]. Предусмотреть защиту от коротких замыканий |
| 46 | Схема управления и защиты от перегрузок и коротких замыканий двух АД с короткозамкнутым ротором, питаемых от общей трехфазной сети |
| 47 | Схема дистанционного управления с трех мест синхронным двигателем. Обеспечить защиту от перегрузок и коротких замыканий |
| 48 | Схема управления АД с короткозамкнутой обмоткой ротора в функции пути и времени. Запитать от трехфазной сети 380 B [2, с. 522] |
| 49 | Схема автоматизированного реостатного пуска АД с фазным ротором в функции тока [1, с. 468]. Предусмотреть защиту от коротких замыканий |
| 50 | Схема автоматизированного реостатного пуска ДПТ параллельного возбуждения в функции скорости [1, с.468] |
Продолжение табл. 2
| 1 | 2 |
| 51 | Схема управления двумя АД, питаемыми от общей трехфазной сети. Для управления одним из них использовать контактор, другим – магнитный пускатель |
| 52 | Схема управления и защиты АД с короткозамкнутым ротором от перегрузок и обрыва фазы с помощью электромагнитного реле тока, реле времени и промежуточного реле |
| 53 | Схема управления двумя АД, питаемыми от общей трехфазной сети. Использовать магнитные пускатели и кнопочные станции. Предусмотреть для одного из них возможность дистанционного управления с двух мест |
| 54 | Схема управления и защиты от перегрузок и коротких замыканий реверсивного АД с фазным ротором |
| 55 | Схема автоматического управления пуском АД с фазным ротором, используя четырехступенчатый реостат |
| 56 | Схема дистанционного управления с двух мест и защиты от перегрузок АД с фазным ротором |
| 57 | Схема управления и защиты АД с фазным ротором от КЗ с использованием электромагнитного реле тока |
| 58 | Схема управления и защиты от перегрузок и коротких замыканий АД с короткозамкнутым ротором и АД с фазным ротором, питаемых от общей трехфазной сети |
| 59 | Схема дистанционного управления с трех мест и автоматического управления пуском АД с фазным ротором. Использовать двухступенчатый пусковой реостат |
| 60 | Схема тиристорного электропривода ДПТ от трехфазной сети [3, с. 411] |
| 61 | Схема управления и защиты короткозамкнутого АД с помощью реверсивного магнитного пускателя. Предусмотреть возможность управления с трех мест |
| 62 | Схема автоматического управления пуском АД с фазным ротором. Использовать трехступенчатый реостат, предусмотреть защиту от перегрузок |
Продолжение табл. 2
| 1 | 2 |
| 63 | Схема автоматизированного реостатного пуска ДПТ смешанного возбуждения в функции времени |
| 64 | Схема автоматизированного динамического торможения ДПТ смешанного возбуждения |
| 65 | Схема электропривода ДПТ последовательного возбуждения от трехфазной сети с помощью транзисторного преобразователя |
| 66 | Схема автоматизированного реостатного пуска АД с фазным ротором в функции времени. Предусмотреть защиту от коротких замыканий и перегрузок |
| 67 | Схема дистанционного управления с двух мест и автоматического управления пуском АД с фазным ротором. Использовать трехступенчатый пусковой реостат |
| 68 | Схема дистанционного управления АД с короткозамкнутым ротором с трех мест с помощью контактора и кнопочных станций. Обеспечить защиту от перегрузок и коротких замыканий |
| 69 | Схема управления и защиты от перегрузок и коротких замыканий реверсивного АД с фазным ротором. Использовать четырехступенчатый реостат |
| 70 | Схема управления и защиты реверсивного трехфазного АД с фазным ротором с помощью кнопочного пускателя |
| 71 | Схема управления и защиты от перегрузок и коротких замыканий АД с фазными роторами, питаемыми от общей трехфазной сети 380 B |
| 72 | Схема автоматизированного реостатного пуска ДПТ независимого возбуждения в функции тока и времени |
| 73 | Схема управления и защиты от перегрузок и коротких замыканий реверсивного АД с короткозамкнутым ротором |
| 74 | Схема автоматизированного реостатного пуска АД с фазным ротором в функции тока и времени. Предусмотреть защиту от КЗ и перегрузок |
Продолжение табл. 2
| 1 | 2 |
| 75 | Схема управления АД с фазным ротором и реостатным торможением. Предусмотреть пуск, остановку, защиту от перегрузок и КЗ, динамическое торможение |
| 76 | Схема управления и защиты от перегрузок и КЗ реверсивного АД с короткозамкнутым ротором |
| 77 | Схема управления и защиты от перегрузок и коротких замыканий для трех трехфазных АД с коротко- замкнутыми роторами. Использовать магнитные пускатели и кнопочные станции. Запитать двигатели от трехфазной сети 380 B |
| 78 | Схема управления и регулирования частоты вращения АД с короткозамкнутым ротором с помощью тиристорного преобразователя переменного напряжения с двумя встречно-параллельными тиристорами в каждой фазе обмотки статора двигателя. Предусмотреть защиту от коротких замыканий и перегрузок |
| 79 | Схема управления и защиты реверсивного трехфазного АД с фазным ротором с помощью магнитного и кнопочного пускателя. Использовать пятиступенчатый реостат |
| 80 | Схема АД с короткозамкнутым ротором трехфазного тока мощностью 10 кВт для привода металлообрабаты- вающего станка с динамическим торможением. Напряжение сети 380 B |
| 81 | Схема АД с короткозамкнутым ротором мощностью 7,5 кВт и АД с фазным ротором мощностью 13 кВт трехфазного тока. Пускаются в заданной последо- вательности. Напряжение сети 380 B |
| 82 | Схема АД с фазным ротором мощностью 18 кВт для привода теплового двигателя при обкатке. Напряжение сети 380 B |
| 83 | Схема из трех АД на 380 В с короткозамкнутыми роторами мощностью 1,1; 2,2 и 4,4 кВт для привода ленточных транспортеров технологической линии. |
Продолжение табл. 2
| 1 | 2 |
| 84 | Схема синхронного электродвигателя трехфазного тока с машинным возбуждением мощностью 30 кВт для привода центробежного насоса. Пуск плавный и легкий. Напряжение сети 380 B |
| 85 | Схема синхронного электродвигателя трехфазного тока без машинного возбуждения (с кремниевыми выпрямителями) мощностью 40 кВт для привода компрессора. Напряжение сети 380 B |
| 86 | Схема АД однофазного тока мощностью 100 Вт для привода компрессора холодильника. Напряжение 220 B |
| 87 | Схема ДПТ параллельного возбуждения мощностью 4 кВт для привода электрокара. Напряжение сети 110 B |
| 88 | Схема ДПТ последовательного возбуждения мощностью 6 кВт для привода грейферного крана. Напряжение сети 110 B |
| 89 | Схема ДПТ смешанного возбуждения мощностью 1 кВт для привода подвесной тележки. Напряжение сети 220 B |
| 90 | Схема АД с короткозамкнутым ротором трехфазного тока мощностью 20 кВт для привода деревообрабатывающего станка с реостатным торможением. Напряжение сети 380 B |
| 91 | Схема АД с короткозамкнутым ротором мощностью 7,5 кВт и АД с фазным ротором мощностью 15 кВт трехфазного тока. Напряжение сети 380 B. Пускаются в заданной последовательности |
| 92 | Схема АД с фазным ротором мощностью 38 кВт для привода теплового двигателя при обкатке. Напряжение сети 380 B |
| 93 | Схема из трех АД с фазными роторами мощностью 2, 4 и 6 кВт для привода ленточных транспортеров технологической линии сельскохозяйственного предприятия. Использовать трехступенчатые реостаты. Напряжение сети 380 В |
О кончание табл. 2
| 1 | 2 |
| 94 | Схема синхронного электродвигателя трехфазного тока с машинным возбуждением мощностью 40 кВт для привода центробежного насоса. Пуск плавный. Напряжение сети 380 B |
| 95 | Схема синхронного электродвигателя трехфазного тока без машинного возбуждения (с кремниевыми выпрямителями) мощностью 40 кВт для привода компрессора. Напряжение сети 380 B |
| 96 | Схема АД однофазного тока мощностью 200 Вт для привода компрессора холодильника. Напряжение сети 220 B |
| 97 | Схема ДПТ параллельного возбуждения мощностью 4 кВт для привода электрокара. Напряжение сети 220 B |
| 98 | Схема ДПТ последовательного возбуждения мощностью 6 кВт для привода грейферного крана. Напряжение сети 127 B |
| 99 | Схема ДПТ смешанного возбуждения мощностью 2 кВт для привода подвесной тележки. Напряжение сети 110 B |
БИБЛИОГРАФИЧ ЕСКИЙ СПИСОК
1. Электротехника / под ред. проф. В.Г. Герасимова.– М.: Высш. шк., 1985.– 480 с.
2. Борисов Ю.М. Электротехника / Ю.М. Борисов, Д.Н. Липатов, Ю.Н. Зорин. – М.: Энергоатомиздат, 1985. – 550 с.
3. Касаткин А.С. Электротехника / А.С. Касаткин, М.В. Немцов. – М.: Энергоатомиздат, 1983. – 440 с.
4. Иванов И.И. Электротехника / И.И. Иванов, В.С. Равдоник.– М.: Высш. шк., 1984. – 375 с.
5. Волынский Б.А. Электротехника / Б.А. Волынский, Е.Н. Зейн, В.Е. Шатерников. – М.: Энергоатомиздат, 1987. – 525 с.
6. Правила устройства электроустановок. – 7-е изд., по
сост. на 13.05.2009. – СПб.: Деан, 2009. – 464 с.
7. Справочник по проектированию электрических сетей и электрооборудования / под ред. общей ред. Ю.Н. Тищенко и др. – М.: Энергоатомиздат, 1991. – 464 с.
8. Москаленко В.В. Электрический привод. – М.:
Академия, 2007. – 368 с.
9. Алексеев В.В. Электрический привод / В.В. Алексеев, А.Е. Козярук. – М.: Академия, 2008. – 200 с.
10. Епифанов А.П. Основы электропривода. – СПб.: Лань, 2008. – 192 с.
11. Кабдин Н.Е. Электропривод и электрооборудование: метод. рекомендации по изучению дисциплины и задания для выполнения контр. работы / Н.Е. Кабдин, А.А. Герасенков. – М.: Изд-во МГАУ им. В.П. Горячкина, 2002. – 34 с.
12. Домников С.В. Методическое пособие к выполнению РГР по дисциплине «Электротехника, электрические машины и аппараты»: в 3 ч. Ч.2: Трансформаторы, электрические машины и аппараты, электропривод / С.В. Домников и др.; под ред. Т.Т. Розум. – Минск: Изд-во БНТУ, 2002. – 65 с.
13. Плотников П.К. Электропривод в приборостроении: учеб. пособие. – 2-е изд., перераб. и доп. – Саратов: Изд-во СарГТУ, 2008. – 164 с.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ.......................................................................... 3
1. ОБЩИЕ УКАЗАНИЯ...................................................... 4
2. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ ПЕРЕМ ЕННОГО ТОКА 6
Принцип действия АД................................................. 8
Схемы замещения. Естественные характеристики АД 11
Анализ электромеханической
характеристики АД..................................................... 14
Анализ механической характеристики АД............ 15
Задание №1................................................................. 17
3. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА 39
Схемы включения двигателя постоянного тока
и его конструктивная схема...................................... 39
Типы обмоток двигателей постоянного тока………41
Особенности схемных и конструктивных решений ДПТ. Реакция якоря 42
Электромеханическая и механическая характеристики ДПТ независимого возбуждения…46
Режимы торможения ДПТ......................................... 48
Способы регулирования скорости вращения………54
Задание №2................................................................. 60
Задание №3................................................................. 69
БИБЛИОГРАФИЧЕСКИЙ СПИСОК............................. 84
Кузнецов Андрей Юрьевич Зонов Павел Владимирович
ЭЛЕКТРОПРИВОД И
ЭЛЕКТРООБОРУДОВАНИЕ
Учебно-методическое пособие
Редактор Т.К. Коробкова Компьютерная верстка В.Я. Вульферт
Подписано к печати Формат 60х841/16
Объем 2,6 уч.- изд. л. Заказ № Тираж 100 экз.
Изд. №108
Отпечатано в издательстве НГАУ
630039, Новосибирск, ул. Добролюбова, 160
Дата добавления: 2018-05-12; просмотров: 184; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!