МЕХАНИЧЕСКИЕ ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ЛИНЕЙНОМ ДИНАМИЧЕСКОМ МОМЕНТЕ
В общем случае линейный динамический момент можно представить
зависимостью
 , (1) где
, (1) где  , (2)
, (2)
 , (3)
, (3)
Мк – момент электродвигателя при w = 0, Мс – статический момент при w = 0,
b – жесткость характеристики Мдин(w). 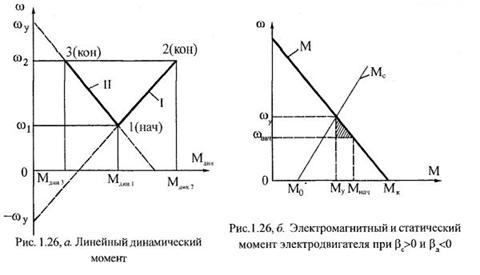 Подставляем (1) в основное уравнение движения электропривода
Подставляем (1) в основное уравнение движения электропривода
 +b∙w=J
+b∙w=J  (4)
(4)
Обозначив
Тм=  , (5)
, (5)
 , (6)
, (6)
С учётом (5) и (6) формула (4) преобразуется к следующему дифференц. уравнению вида:
-wу=-w+Тм (6) решение которого принимает вид:  (7)
(7)
Гдеwнач – начальное значение скорости в переходном процессе
Тм– электромеханическая постоянная времени электропривода,
wу – установившееся значение скорости , соответствующее Мдин= 0.
Электромагнитный момент записывается с учётом (1), (2), (3), (6) cледующим образом:


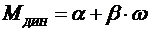
 Принимая во внимание рис.1.26,б:
Принимая во внимание рис.1.26,б: 
приb>0:
при b<0:
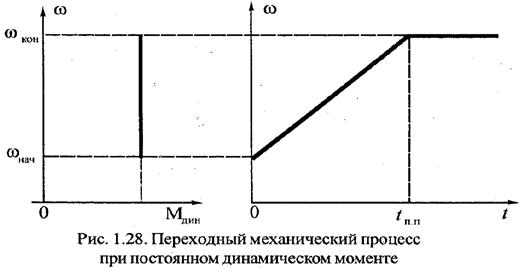
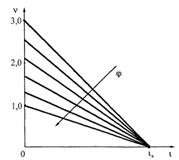
ВРЕМЯ РАЗГОНА И ТОРМОЖЕНИЯ ЭП
Пологая в общем случае, что динамический момент является функциейскорости, т. е. Мдин(w), время переходного процесса tп.п. при изменении скорости от w1 до w2 находим из основного уравнения движения электропривода:
 .
.
Интеграл можно взять только для частных случаев функции Мдин(w):
а)Мдин(w) = Мдин= const, в этом случае 
где  .
.
б)Мдин =  ±½b½w, тогда
±½b½w, тогда
 ,
,
где 
 , при b> 0
, при b> 0
 , при b< 0
, при b< 0
ВЛИЯНИЕ ПАРАМЕТРОВ НА СВОЙСТВА И ХАРАКТЕРИСТИКИ ДПТ НВ
Параметры ДПТ НВ: U, RЯ и Ф могут принимать значения, отличающиеся от номинальных:
 где
где  ,
,  ,
,
 Из
Из  , находим
, находим  \\%(Разделим на ω0)
\\%(Разделим на ω0)
 , сω0=UНОМ,
, сω0=UНОМ, 
Введем обозначения безразмерных величин: 

и получим окончательное выражение электромеханической характеристики ДПТ НВ в относительных безразмерных величинах  ,
, 
 , получаем
, получаем  получить уравнение механической характеристики ДПТ НВ в относительных безразмерных величинах
получить уравнение механической характеристики ДПТ НВ в относительных безразмерных величинах 
Влияние параметров на характеристики ДПТ НВ исследуем
1) 
Это соответствует питанию якоря электродвигателя от управляемого преобразователя напряжения УПН
 Жесткость безразмерной мех-ой характеристики равна
Жесткость безразмерной мех-ой характеристики равна 
2) 

 . Ток и момент кз определяются зависимостью
. Ток и момент кз определяются зависимостью 
 3)
3)  . При υ=0 получаем
. При υ=0 получаем  независимо от величины φ. Поэтому электромеханические характеристики будут представлять семейство прямых, выходящих из точки (ιк,0). При идеальном холостом ходе ι=0 и
независимо от величины φ. Поэтому электромеханические характеристики будут представлять семейство прямых, выходящих из точки (ιк,0). При идеальном холостом ходе ι=0 и  т.е. относительная скорость идеального холостого хода υ0 изменяется обратно пропорционально относительному магнитному потоку φ. Момент короткого замыкания μк будет уменьшаться пропорционально φ:
т.е. относительная скорость идеального холостого хода υ0 изменяется обратно пропорционально относительному магнитному потоку φ. Момент короткого замыкания μк будет уменьшаться пропорционально φ:  а скорость υ будет возрастать.
а скорость υ будет возрастать.
ТОРМОЗНЫЕ РЕЖИМЫ ДПТ НВ
Рекуперативное торможение возникает, когда скорость ротора выше скорости идеального холостого хода. Eя  U, U=E+IЯRЯ,
U, U=E+IЯRЯ,  M=C(-IЯ)<0,
M=C(-IЯ)<0,  ,
,  //%*Iяи получим уравнение баланса мощностей,
//%*Iяи получим уравнение баланса мощностей,  .
. 
Рекуперативное торможение возможно только в механизмах с активным Mc. При U=var можно получить рекуперативное торможение до самых низких скоростей.
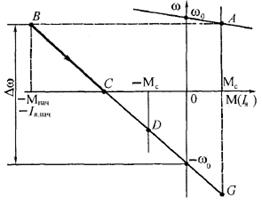
Торможение противовключением происходит тогда, когда двигатель под действием внешних сил или сил инерции вращается в противоположном направлении. В этом режиме ЭДС и напряжение действуют согласно.1) При активном Мс Мном  λм=Мmax знак скорости изменяется, а знак момента – сохраняется.
λм=Мmax знак скорости изменяется, а знак момента – сохраняется.  . Протекают большие токи
. Протекают большие токи 
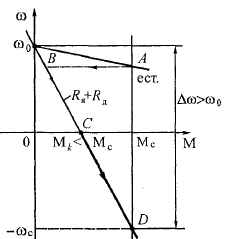 для ограничения - вводят добавочное сопротивление
для ограничения - вводят добавочное сопротивление 
Тогда  Поэтому
Поэтому 
 2) При реактивном Мс момент ЭД изменяет знак, а скорость – сохраняет. Реверсировании двигателя за счёт смены полярности напряжения.
2) При реактивном Мс момент ЭД изменяет знак, а скорость – сохраняет. Реверсировании двигателя за счёт смены полярности напряжения.
Уравнение электрического баланса 
Ток якоря 
 для ограничения тока в цепь якоря вводят добавочное сопротивление:
для ограничения тока в цепь якоря вводят добавочное сопротивление:  . Тогдападениескорости
. Тогдападениескорости  . UIЯ+EIЯ=I2ЯRЯ,
. UIЯ+EIЯ=I2ЯRЯ,
РЭЛ+РЭМ=ΔР.
В обоих случаях ЭД нужно отключить от сети в точке C, иначе начнётся разгон в другую сторону.
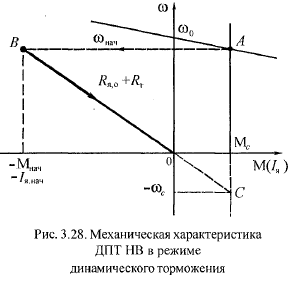
Динамическое торможение происходит, если вращающийся якорь ЭД отключается от сети, а обмотка возбуждения остаётся подключенной к источнику. Ток якоря протекает в противоположном направлении под действием ЭДС
 .
.  . Для ограничения броска тормозного тока якорь замыкают на тормозное сопротивление:
. Для ограничения броска тормозного тока якорь замыкают на тормозное сопротивление:  . EIЯ=I2ЯRЯ, РЭМ=ΔР.
. EIЯ=I2ЯRЯ, РЭМ=ΔР.
Дата добавления: 2018-04-15; просмотров: 554; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!