Программное управление. Следящие системы
На первом этапе развития техники управления использовался практически лишь один вид автоматического управления – поддержание заданного постоянного значения регулируемой величины.
Стабилизация:
Системы поддержания постоянства управляемой величины называют также системами стабилизации. Желаемый закон в них имеет вид  . Рассмотрим схему с простейшими линейными преобразовательными звеньями. Уравнения статики для такой схемы (см. рис. 1.3г) будут:
. Рассмотрим схему с простейшими линейными преобразовательными звеньями. Уравнения статики для такой схемы (см. рис. 1.3г) будут:
 ;
;  (1.3)
(1.3)
где k0, kz, kp — постоянные коэффициенты, называемые соответственно коэффициентами передачи объекта, регулятора и нагрузки. Из (1) получаем
 , (1.4)
, (1.4)
т.е. значение регулируемой величины х зависит от нагрузки z, уменьшаясь с ее ростом.
Регулирование, в котором установившаяся ошибка при постоянном заданном значении х0 зависит от нагрузки, называют статическим. Установившаяся статическая ошибка:
 . (1.5)
. (1.5)
Выражение это громоздко, и для оценки степени зависимости статической ошибки от нагрузки z переходят к уравнениям, связывающим относительные безразмерные отклонения  и
и  , где абсолютные значения
, где абсолютные значения  отнесены к базовым значениям, соответствующим номинальной нагрузке zном (рис.1.4). Статизм δ равен относительной крутизне регулировочной характеристики x = F(z):
отнесены к базовым значениям, соответствующим номинальной нагрузке zном (рис.1.4). Статизм δ равен относительной крутизне регулировочной характеристики x = F(z):
 (1.6)
(1.6)
Если регулировочная характеристика прямолинейна, то:
|
|
|
 (1.7)
(1.7)
Статический регулятор поддерживает постоянное значение регулируемой величины с ошибкой.
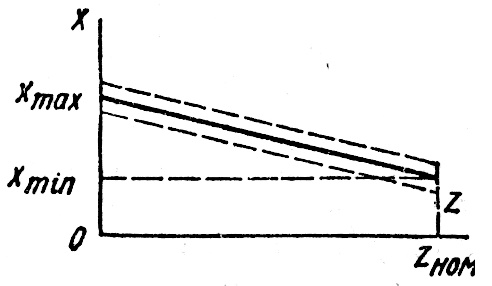
Рис.1.4. Зависимость статической ошибки от нагрузки z
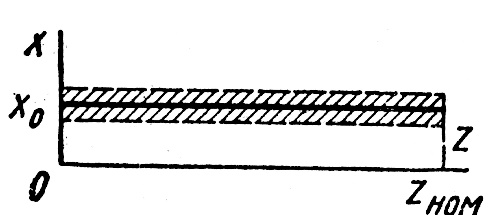
Статизм — это величина относительной статической ошибки при изменении нагрузки от холостого хода до номинальной. В некоторых системах статическая ошибка нежелательна. Тогда переходят к регулированию, в котором она в силу структуры системы равна нулю, т.е. к астатическому регулированию. Регулировочная характеристика идеального астатического регулирования представляет собой прямую линию, параллельную оси нагрузки
Программное управление
 При программном управлении алгоритм функционирования задан и можно построить специальное устройство — датчик программы, — вырабатывающее
При программном управлении алгоритм функционирования задан и можно построить специальное устройство — датчик программы, — вырабатывающее  .Таким образом, все схемы, показанные на рисунке принципы управления, в которых
.Таким образом, все схемы, показанные на рисунке принципы управления, в которых  есть заданная функция, а звенья 1 представляют собой датчики программы, вырабатывающие эту функцию, относятся к классу систем программного управления. Программное управление можно осуществить по любому из фундаментальных принципов или с помощью их комбинации. В практике используют два вида систем программного управления:
есть заданная функция, а звенья 1 представляют собой датчики программы, вырабатывающие эту функцию, относятся к классу систем программного управления. Программное управление можно осуществить по любому из фундаментальных принципов или с помощью их комбинации. В практике используют два вида систем программного управления:
|
|
|
· системы с временной программой (датчик программы вырабатывает непосредственно функцию ). (Примеры таких устройств: устройства программы для изменения температуры закалочных печей, заводные игрушки, магнитофоны, проигрыватели и т. д.)
· системы с пространственной программой.В них движение исполнительного органа (инструмента) осуществляется по заданной в пространстве траектории, закон же движения по траектории во времени мало существен и в широких пределах может быть произвольным (Пример: устройство управлении металлообрабатывающими станками). Используются два способа пространственного программного управления:
o движение по каждой из координатных пространственных осей выполняется отдельным приводом, движение по одной из осей задается произвольно (обычно равномерным), а остальные движения увязываются с первым так, чтобы инструмент двигался по заданной траектории.
o заданная траектория описывается с помощью системы параметрических уравнений, в которых параметром является время, а затем строится контроллер, задающее движение приводам по отдельным осям в соответствии с этими параметрическими уравнениями.
|
|
|
Следящие системы
В следящих системах алгоритм функционирования заранее не известен. Обычно регулируемая величина в таких системах должна воспроизводить изменение некоторого внешнего фактора, следить за ним. Так, автоматически управляемые зенитное орудие должно поворачиваться, следя за полетом цели. Следящая система может быть выполнена в соответствии с любым фундаментальным принципом управления и будет отличаться от соответствующей системы программного управления тем, что вместо датчика программы в ней будет помещено устройство слежения за изменениями внешнего фактора.
Дата добавления: 2018-04-05; просмотров: 762; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!