Упругие чувствительные элементы деформационных манометров (УЧЭ)
Основные типы УЧЭ: мембраны, мембранные коробки, сильфоны и трубчатые пружины (рис. 5).
Мембрана (рис. 5, а) представляет собой упругую пластину в форме диска, жестко закрепленную по наружному контуру, прогиб которой определяется действующим на нее давлением.
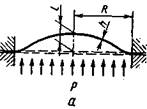
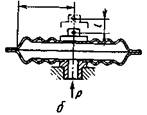
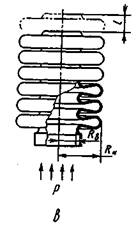
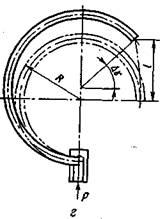
Рис. 5. Основные типы УЧЭ
Мембранная коробка (рис. 5, б) состоит из двух гофрированных мембран, герметично соединенных по наружному контуру, что соответственно увеличивает ее прогиб под действием давления.
Сильфон (рис. 5, в) имеет форму тонкостенного цилиндра, боковая поверхность которого гофрирована с целью увеличения его прогиба под действием давления. При большой глубине вытяжки гофр сильфона становится идентичным батарее последовательно соединенных мембранных коробок.
Трубчатая пружина (рис. 5, г) представляет собой тонкостенную трубку, ось которой искривлена по дуге окружности. В отличие от предыдущего трубчатая пружина под действием давления разгибается, а ее свободный конец перемещается по дуге.
При преобразовании давления в перемещение основными метрологическими характеристиками УЧЭ являются: упругая характеристика, нелинейность упругой характеристики, чувствительность и жесткость, гистерезис и постоянство упругой характеристики.
Индуктивные и трансформаторные (взаимоиндуктивные) электромагнитные преобразователи.
Индуктивными преобразователями называются преобразователи, преобразующие перемещение в изменение индуктивности магнитной цепи. Принцип действия преобразователя заключается в следующем (рис. 6). Преобразователь содержит магнитопроводы 1и 2 с катушками Z1 и Z2, между которыми помещен жесткий центр 3 мембраны. Катушки питаются напряжением переменного тока и включены в индуктивный мост, два дополнительных плеча которого составляют постоянные сопротивления Z3 и Z4. В равновесном положении мост сбалансирован и сила тока Iк в диагонали моста равна нулю. При воздействии на мембрану давления жесткий центр сместится, что приведет к увеличению магнитного сопротивления магнитопровода 1 и уменьшению сопротивления магнитопровода 2, а вместе с тем и их полных электрических сопротивлений Z1 и Z2. В результате разбаланса моста по диагонали последнего потечет ток Iк, пропорциональный перемещению центра мембраны, а следовательно, давлению.
|
|
|
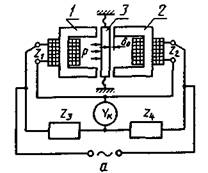
Рис. 6. Принцип действия индуктивного преобразователя
Дифференциальная схема индуктивного преобразователя, выходным параметром которой является разность Z1–Z2, расширяет линейный участок до
∆δ = ± (0,3-0,4) δ0, а также существенно повышает чувствительность преобразователя, которая позволяет фиксировать 0,1 мкм по перемещению жесткого центра.
|
|
|
По принципу действия индуктивные преобразователи пригодны для измерения любого вида давления: абсолютного, избыточного и разности давлений. При этом достоинством индуктивных преобразователей является отсутствие механических устройств для вывода выходного сигнала УЧЭ к промежуточным преобразователям, что обусловливает отсутствие потерь на трение в передаточном механизме. Поэтому индуктивные преобразователи пригодны для измерения небольших разностей давлений при высоком статическом давлении с хорошими динамическими характеристиками.
Дата добавления: 2018-04-05; просмотров: 358; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!