Моделирование дискретных сигналов в Simulink
Лабораторная работа 1
ДИСКРЕТИЗАЦИЯ И КВАНТОВАНИЕ СИГНАЛОВ
(4 часа)
Цель работы: изучение процесса преобразования аналогового сигнала в цифровой, используя средства пакетов MATLAB и Simulink.
Задачи работы:
1. знакомство с пакетами MATLAB и Simulink;
2. изучение этапов дискретизации и квантования;
3. моделирование эффекта наложения (aliasing) в пакете Simulink.
Оглавление
1. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ.. 2
1.1. Дискретизация. Вводные замечания. 2
1.1.1. Моделирование дискретных сигналов в MATLAB.. 3
1.1.2. Моделирование дискретных сигналов в Simulink. 6
1.2. Квантование. Вводные замечания. 15
1.2.1. Моделирование квантования в MATLAB.. 21
1.2.2. Моделирование квантования в Simulink. 22
1.2.3. Дополнительные замечания о моделировании квантования в Simulink и MATLAB.. 27
1.3. Теорема Котельникова. Вводная информация. 30
1.3.1. Наложение и спектры дискретных сигналов. 31
1.3.2 Демонстрация наложения с помощью Simulink. 32
2. ЗАДАНИЯ ДЛЯ ВЫПОЛНЕНИЯ.. 35
3. КОНТРОЛЬНЫЕ ВОПРОСЫ.. 35
4. БИБЛИОГРАФИЧЕСКИЙ СПИСОК.. 36
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Дискретизация. Вводные замечания
В данном разделе мы рассмотрим преобразование аналогового сигнала в дискретный. Такое преобразование принято называть «дискретизацией».
Возможные варианты сигналов показаны на рис. 1. Сигнал, изображенный на рис. 1.а,будем называть исходным аналоговым. На рис. 1. бпредставлена дискретная версия исходного сигнала, обычно именуемая данными, оцифрованными естественным способом, или данными с амплитудно-импульсной модуляцией (pulse amplitude modulation – РАМ). Данные на рис. 1.б еще несовместимы с цифровой системой, поскольку амплитуда каждой естественной выборки все еще может принимать бесконечное множество возможных значений, а цифровая система работает с конечным набором значений. На рис. 1.в и рис. 1.г показано представление исходного сигнала такими дискретными импульсами, вершина которых плоская. Если значения импульсов образуют несчетное множество, они называются дискретными отсчетами. Далее эти импульсы можно подать на устройство квантования, преобразующее импульсы так, что их значения образуют счетное множество – такие импульсы называются квантованными отсчетами. Данные в таком формате совместимы с цифровой системой.
|
|
|
Импульсы рис.1. г отличаются от импульсов рис.1.в тем, что полностью заполняют промежуток между моментами обновления значения сигнала. Такой способ дискретизации, именуемый «выборка-хранение», наиболее эффективен с точки зрения помехоустойчивости.
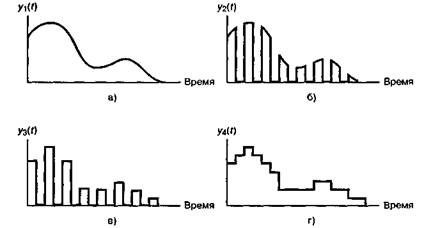
Рис. 1. Исходные данные в системе координат «время-амплитуда»:
а) исходный аналоговый сигнал; 6) данные в естественной дискретизации;
|
|
|
в) квантованные выборки; г) выборка-хранение
Моделирование дискретных сигналов в MATLAB
Генерировать сигналы в MATLAB можно тремя способами:
– в диалоговом режиме, с помощью последовательности команд в командном окне;
– в автоматическом режиме, путем создания и запуска на выполнение m-скрипта;
– в автоматическом режиме, путем создания и вызова m-функции.
Генерирование сигналов в диалоговом режиме. Этот способ наиболее трудоемок, поскольку требует каждую команду набирать с клавиатуры в командном окне. Чтобы повысить производительность труда, можно всю последовательность команд предварительно набрать в любом текстовом редакторе (обычно это Notebook или Word), а затем, скопировав текст в буферную память (Clipboard), вставить его в командное окно. Недостаток этого способа в том, что необходимо одновременно держать активными две программы – MATLAB и текстовый редактор. Достоинство данного способа проявляется тогда, когда работу в MATLAB производят, следуя некоей инструкции, в которой теоретические сведения чередуются с практическими заданиями в виде фрагментов текстов m-скриптов.
Например, так выглядит в текстовом редакторе последовательность команд генерирования N отсчетов тонального сигнала амплитудой A, частотой f0, начальной фазой Fi0, с частотой дискретизации Fs:
|
|
|
% гармонический сигнал
A=1; f0=100; Fi0=pi/2; Fs=1000; N=20; % параметры сигнала
t=(0:N-1)/Fs; % моменты времени
s=A*sin(2*pi*f0*t+Fi0); % вычисление отсчетов
%сигнала
plot(t,s) % вывод графика
title('Гармонический сигнал') % заголовок
xlabel('ВремЯ, с'); ylabel('Уровень'); % надписи вдоль осей
grid on % координатнаЯ сетка
Полученный график отображается в специальном окне с надписью Figure #1 (если это первый строящийся график). График удобно сохранять путем экспорта в экономном формате *.jpg (рис.2).

Рис.2. График сигнала тональной частоты
Примечание: при использовании символов кириллицы в тексте команд (комментарии, заголовки и т.п.) следует учитывать особенности «отношения» каждой конкретной версии MATLAB к кириллице. Так, в MATLAB версии 6.1 нельзя употреблять строчную букву «я» – вместо нее следует писать прописную букву «Я». Именно по этой причине в тексте на рис. 2 вместо «Время» получилось «ВремЯ». Впрочем, эту надпись можно отредактировать (кнопка со стрелкой Edit Plot в графическом окне) перед тем, как сохранять рисунок на диске.
|
|
|
Генерирование сигналов путем создания m-скрипта.Данный способ отличается тем, что все команды набираются в специальном окне редактора m-файлов (рис.3).

Рис.3. Набор команд в окне редактора m-файлов
Данный способ удобен тем, что вместо сторонних программных продуктов используется собственный инструментарий MATLAB, специализированный для написания и отладки m-скриптов.
Генерирование сигналов путем создания m-функции.Данный способ отличается тем, что входные данные записывают как аргумент некоей функции  , а выходные – как значение этой функции. Удобство в том, что символьные обозначения данных могут отличаться от обозначений, используемых в теле функции. Более того, числовые значения входных данных можно просто задавать в наименовании вызываемой функции. Последнее обстоятельство продемонстрируем на примере.
, а выходные – как значение этой функции. Удобство в том, что символьные обозначения данных могут отличаться от обозначений, используемых в теле функции. Более того, числовые значения входных данных можно просто задавать в наименовании вызываемой функции. Последнее обстоятельство продемонстрируем на примере.
Создадим подпрограмму – m-скрипт ton.m вида:
% скрипт ton
s=A*sin(2*pi*f0*t+Fi0); % вычисление отсчетов сигнала
Команду выполнения этого скрипта нужно «окружить» командами подготовки входных данных и вывода выходных данных:
A=1; f0=100; Fi0=pi/2; Fs=1000; N=20; % параметры сигнала
t=(0:N-1)/Fs; % моменты времени
ton; % вычисление отсчетов
%сигнала
plot(t,s) % вывод графика
title('Гармонический сигнал') % заголовок
xlabel('ВремЯ, с'); ylabel('Уровень'); % надписи вдоль осей
grid on % координатнаЯ сетка
Очевидно, обозначения входных и выходных данных вызывающей программы должны совпадать с обозначениями соответствующих данных вызываемой подпрограммы.
Теперь поступим по-иному – напишем и сохраним m-функцию под именем ton_sig.m:
%-------функциЯ ton_sig.m -----------
% [s,t]=ton_sig(B,f1,Fi1,Fs,N1)
%---------------------------------------
% генерирование гармонического сигнала
% y = B * sin(2*pi*f1*x + Fi1),
% B - амплитуда;
% N1 - количество отсчетов сигнала;
% f1 - частота;
% Fs - частота дискретизации;
% Fi1 - начальнаЯ фаза сигнала
%---------------------------------------
function [y,x] = ton_sig( B, f1, Fi1, Fs, N1 )
%---------------------------------------
x = (0:N1-1)/Fs; % моменты времени
y = B * sin( 2*pi*f1*x + Fi1 );
%-------- конец функции ton_sig.m ----------
Теперь m-скрипт генерирования того же отрезка косинусоиды будет выглядеть так:
% гармонический сигнал
[s,t]=ton_sig(1,100,pi/2,1000,20) % вычисление отсчетов сигнала
plot(t,s) % вывод графика
title('Гармонический сигнал') % заголовок
xlabel('ВремЯ, с'); ylabel('Уровень'); % надписи вдоль осей
grid on % координатнаЯ сетка
Как видим, теперь числовые значения входных данных задаются как аргументы m-функции ton_sig.m. Выходные данные функции используются для построения графика.
Очевидно, применение m-функций предпочтительно в том случае, когда алгоритм формирования значений функции достаточно сложный, содержится много команд и обращений к разнообразным библиотечным функциям с непростым синтаксисом.
Очевиден и недостаток m-функций – необходимо помнить их синтаксис. Впрочем, получить нужную информацию можно, если в командном окне задать команду help:
>> help ton_sig
В результате на мониторе отобразится комментарий, с которого начинается m-функция. Для приведенного выше примера текст помощи имеет следующий вид:
%-------функциЯ ton_sig.m -----------
% [s,t]=ton_sig(B,f1,Fi1,Fs,N1)
%---------------------------------------
% генерирование гармонического сигнала
% y = B * sin(2*pi*f1*x + Fi1),
% B - амплитуда;
% N1 - количество отсчетов сигнала;
% f1 - частота;
% Fs - частота дискретизации;
% Fi1 - начальнаЯ фаза сигнала
%---------------------------------------
Таким образом, очевиден вывод: очень важно при программировании m-функций снабжать их качественным и подробным комментарием.
Моделирование дискретных сигналов в Simulink
Генерирование сигналов в Simulink, естественно, имеет свои особенности. Рассмотрим их.
Возьмем из библиотеки блоков Simulink два блока: Sine Wave (из раздела Sources) и Scope (из раздела Sinks). Соединив их, получим простую схему (рис.4).

Рис.4. Схема генерации и отображения синусоидального сигнала
Затем двойным щелчком по блоку осциллоскопа (осциллографа) активизируем окно, имитирующее экран осциллоскопа, и запустим модель (кнопка Start simulation). В результате получим изображение отрезка синусоиды (рис.5).

Рис.5. Отображение отрезка синусоиды на экране осциллоскопа
Как видим, генерировать гармонический сигнал в среде Simulink даже проще, чем в среде MATLAB. Однако это первое впечатление весьма обманчиво. Действительно, ведь важно еще уметь управлять параметрами гармонического сигнала. То, что амплитуда гармонического сигнала оказалась равной единице – нам просто «повезло». Действительно, по умолчанию амплитуда генерируемого сигнала принята равной единице. Однако частотой, начальной фазой и длительностью сигнала мы пока не управляем.
Дважды щелкнем по блоку Sine Wave – в результате появится окно настроек параметров (рис.6). Щелкнув по кнопке Help, получим инструкцию по данному блоку, сущность которой сводится вкратце к тому, что в данном блоке выполняется операция

Из приведенной формулы и надписей на рис.6 становится понятным смысл четырех переменных: амплитуды, угловой частоты, начальной фазы и постоянной составляющей. Остается пока зашифрованным смысл переменной «время».
Останавливаясь на этом важном вопросе, отметим различие понятий «время» и «модельное время». Так, генерирование отрезка сигнала длительностью 1 с (модельное время) может длиться значительно, чем более короткий промежуток времени, например, 0.1 с (реальное время). Скорость генерирования зависит от объема вычислений, быстродействия компьютера, от выбранного «решателя», т.е. алгоритма моделирования и т.д. Кстати, вполне возможен обратный эффект – для сложного алгоритма процедура моделирования отрезка сигнала длительностью 0.1 с может растянуться на несколько секунд.
Сигнал может генерироваться двух типов: непрерывный time-based и дискретный sample-based. Соответственно, для моделирования работы непрерывных систем рекомендуют использовать непрерывный тип time-based, а для моделирования работы дискретных систем – дискретный тип sample-based.
Если установлен тип time-based, тогда параметр Sample time может принимать значения:
– 0 (по умолчанию) – блок работает в непрерывном режиме;
– > 0 – блок работает в дискретном режиме;
– -1 – блок наследует тот же режим, что и принимающий блок.
Как указывается в Help, работа в непрерывном режиме может приводить к большим погрешностям генерации на больших промежутках модельного времени.

Рис.6. Окно настроек параметров блока Sine Wave
Работа в дискретном режиме заставляет блок вести себя так, как если бы к выходу непрерывного генератора был присоединен блок Zero-Order Hold(из раздела Discrete). Действительно, собрав две схемы (рис.7) и задав в обоих случаях значение параметра Sample time, равное 0.5 (окно настройки блока Zero-Order Hold показано на рис.8), получаем идентичные результаты (рис.9).

Рис.7. Вставка в схему генерации и отображения синусоидального сигнала
блокаZero-Order Hold

Рис.8. Окно настройки блока Zero-Order Hold

Рис.9. Идентичность результата работы схем показанных на рис. 7
Таким образом, блок Zero-Order Hold можно трактовать как «дискретизатор», т.е. часть аналого-цифрового преобразователя (АЦП), ответственную за дискретизацию сигнала. Иногда блок Zero-Order Hold именуют АЦП. По нашему мнению, это не корректно, поскольку дискретизированный сигнал в «подлинном» АЦП подвергается еще и квантованию по уровню. В блоке Zero-Order Hold, однако, квантование не производится.
Несколько замечаний о способах построения графиков. Помимо блока Scope, график можно построить и с помощью блока X-Y-Graf, на верхний вход X которого нужно подать последовательность моментов времени с помощью блока Clock (часы), а на нижний вход Y – значения генерируемого сигнала (рис.10).

Рис.10. Применение для построения графиков блока X-Y-Graf
В результате предварительно настроенный (в соответствующем окне настройки задаются граничные значения аргумента и функции, а также указывается значение параметра Sample time) графопостроитель выдаст показанный на рис.11 график, если для блока X-Y-Graf задано Sample time=-1(т.е. период дискретизации наследуется).

Рис.11. Отображение синусоиды блоком X-Y-Graf
График будет несколько иным (рис.12), если для блока X-Y-Graf задано Sample time=0.5.

Рис.12. Отображение синусоиды блоком X-Y-Graf, Sample time=0.5
Еще об одном способе построения графиков. Массивы отсчетов моментов времени и соответствующих значений сигнала можно с помощью блока To Workspace экспортировать из среды Simulink в среду MATLAB (рис.13).

Рис.13. Применение блока To Workspace
При этом, как показывает практика, лучше всего задать формат array для экспортируемых данных (рис.14).

Рис.14. Задание форматаarrayдля блока To Workspace
Дальнейшее построение графика в среде MATLAB с помощью команды plot(x,y) не представляет никакого труда (рис.15).

Рис.15. Построение графика данных, экспортированных
с помощью блока To Workspace
Подытожим полученные результаты.
Сигнал типа time-based при работе блока генерации в режиме непрерывного времени имеет вид гладкой функции времени, а в режиме дискретного времени – вид ступенчатого сигнала, такого, как если бы к выходу генератора плавного сигнала был подсоединен блок Zero-Order Hold, являющийся дискретизатором типа «отсчет-хранение».
Иными словами, задавая режим дискретного времени, мы уходим от необходимости в использовании блока Zero-Order Hold.
А теперь сгенерируем в Simulink отрезок дискретного гармонического сигнала с темы же параметрами, что были заданы в MATLAB: амплитуда 1, частота 100 Гц, частота дискретизации 1000 Гц, начальная фаза π/2, количество отсчетов 20.
Собираем снова схему из генератора и осциллоскопа. В окне-маске настройки генератора производим указание нужных числовых значений параметров, задаем тип time-based и присваиваем значение Sample time = 0.001 (рис.16).

Рис.16. Окно настройки генератора
После запуска модели получаем на экране осциллоскопа совсем не ту картину, которую ожидали (рис.17).

Рис.17. Результат осциллоскопа
Причина проста – нужно еще настроить параметры моделирования: задать начало и конец модельного времени (в нашем случае это 0 и 0.02 с, соответственно), а также выбрать алгоритм моделирования (тип «решателя»). На рис.18 показано окно настроек параметров моделирования, активизирующееся при выборе позиции меню Simulation/Simulation parameters. Зачастую эти параметры настраиваются автоматически, но для выделения отдельных частей функции знание их необходимо.

Рис.18. Окно настроек параметров моделирования
Кроме того, настроим параметры осциллоскопа, щелкнув по кнопке Parameters на окне Scope (рис.19 а,б).


а) б)
Рис.19. Настройка параметров осциллоскопа:
а) настройка вкладки General; б) настройка вкладки Data history
После запуска модели на экране осциллоскопа появится изображение (рис.20).

Рис.20. Результат осциллоскопа после проведенных настроек
Поскольку параметры осциллоскопа были заданы так, чтобы в рабочее пространство выводился двумерный массив ScopeDataзначений аргумента и функции, с помощью команд
>> y1=ScopeData(:,1);
>> y2=ScopeData(:,2);
>> plot(y1,y2)
можно построить график сгенерированной функции средствами MATLAB (рис.21).
Рис.21. График сгенерированной функции средствами MATLAB
Сравнивая рис.21 и рис.2, замечаем лишь одно отличие – при моделировании в Simulink сгенерирована 21 точка, тогда как в MATLAB генерировалось 20 точек. Причина различия проста: на интервале модельного времени  при частоте дискретизации Fs находится TFs+1 моментов времени, для которых будет сгенерирован сигнал. Очевидно, это обстоятельство легко учесть, добившись полного совпадения результатов моделирования в средах MATLAB и Simulink.
при частоте дискретизации Fs находится TFs+1 моментов времени, для которых будет сгенерирован сигнал. Очевидно, это обстоятельство легко учесть, добившись полного совпадения результатов моделирования в средах MATLAB и Simulink.
Дата добавления: 2018-04-05; просмотров: 6766; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!