Реакция якоря машины постоянного тока. по дисциплине
ГАПОУ МО «МонПК»
| Контрольная работа № 1
| ||
| по дисциплине | ЭЛЕКТРИЧЕСКИЕ МАШИНЫ | |
|
| ||
| Форма обучения
| заочная | |
| Группа
| ЭТ-17 | |
| Ф.И.О. студента
| Новиков А.В. | |
| № варианта / Шифр
| 6/3 | |
| Ф.И.О. преподавателя
| Медянская М.Ю. | |
Оценка ___________________________ Дата___________________________
Подпись преподавателя______________________________________________
| Дата получения работы в ГАПОУ МО «МонПК» | Дата сдачи работы студентом |
Мончегорск
2017
ОГЛАВЛЕНИЕ
1.Шаговые двигатели, принцип действия, разновидности, характеристики.- стр.3-13
2.Реакция якоря машины постоянного тока. - стр.14-15
3.Задача №1- стр.16
4.Задача №2 - стр.17
Список литературы
Шаговые двигатели, принцип действия, разновидности, характеристики
- Принцип действия шаговых двигателей.
- Биполярные и униполярные шаговые двигатели.
- Виды шаговых двигателей.
- Управление шаговыми двигателями
- Недостатки и достоинства шаговых двигателей.
- Характеристики шаговых двигателей.
Шаговый двигатель это бесколлекторный синхронный двигатель, ротор которого совершает дискретные перемещения (шаги) определенной величины с фиксацией положения ротора в конце каждого шага.
|
|
|
Т.е. перемещение ротора происходит шагами известной величины. Подсчитав шаги можно определить, на сколько изменилось положение ротора, вычислить его абсолютную позицию.
Объединяя в себе двигатель и позиционирующее устройство без обратной связи, шаговый двигатель является идеальным приводом в промышленном оборудовании, станках с ЧПУ, робототехнике…
Принцип действия шаговых двигателей
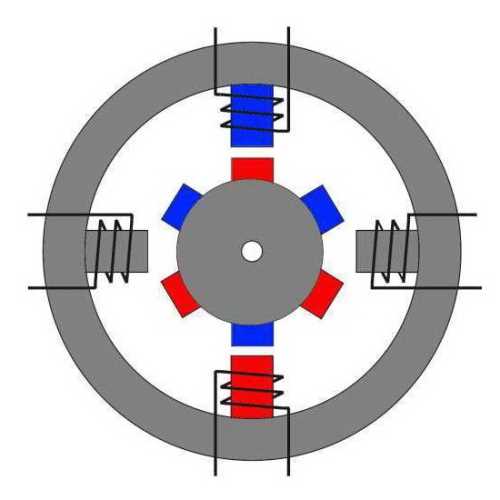
Представьте себе двухполюсный постоянный магнит на валу двигателя – это ротор, окруженный замкнутым магнитопроводом с четырьмя обмотками - статор. Вернее это две обмотки AB и CD с половинками, расположенными на противоположных полюсах статора.
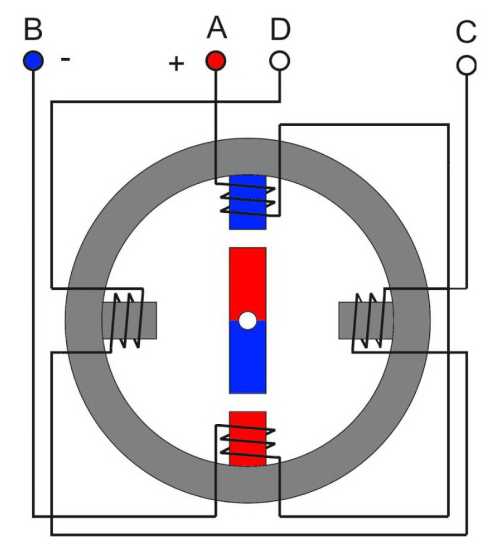
Подключили к источнику напряжения обмотку AB (полярность + -) как показано на рисунке. Ток в этой обмотке вызовет появление магнитного поля статора с полюсами сверху N, снизу S.
Как известно разноименные полюса магнитов притягиваются.
В результате ротор (постоянный магнит) займет положение, в котором оси магнитных полей ротора и работающих полюсов статора совпадают. Механическое положение будет устойчивым. При попытке сдвинуть ротор, возникнет сила, возвращающая его назад.
|
|
|

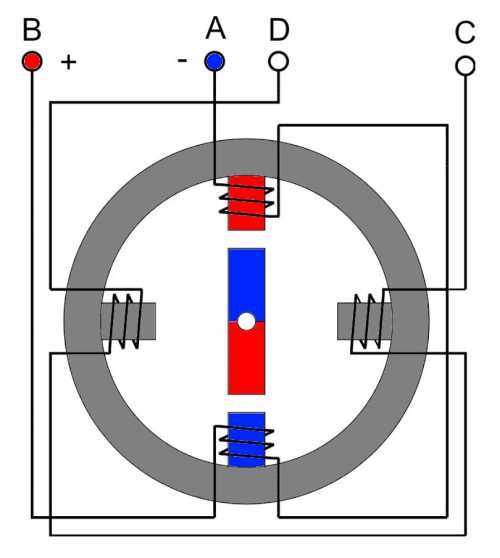
Теперь снимем напряжение с обмотки AB и подадим на обмотку CD (полярностью + -). Ток в обмотке CD вызовет магнитное поле с горизонтальными полюсами, слева S, справа N.
Магнитное поле делает все, чтобы магнитный поток замкнулся по минимальному пути. Ротор повернется в положение указанное на рисунке. Механическое положение ротора опять устойчивое. Это был первый шаг двигателя. В нашем случае он равен одной четвертой оборота.
Отключаем обмотку CD и подаем напряжение опять на обмотку AB, но уже в другой полярности (- +). Опять магнитное поле статора повернется на 90°, а за ним и ротор.

Еще одна коммутация AB - отключаем, CD - подключаем (полярность - +) и ротор совершает еще один шаг на одну четвертую окружности.
Следующая коммутация (с которой мы начали) вернет ротор в исходное положение. Мы сделали полный поворот за 4 шага.
Если продолжить переключение фаз, ротор будет вращаться с частотой, пропорциональной частоте переключения фазных обмоток.
Если коммутировать фазы в противоположной последовательности – крутиться в обратном направлении, прекратить коммутацию - остановится.
Биполярные и униполярные шаговые двигатели
Это был биполярный шаговый двигатель.
|
|
|
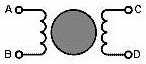
Биполярный двигатель имеет по одной обмотке для каждой фазы. На предыдущих рисунках это обмотки AB и CD. Для изменения магнитного поля должна обеспечиваться сложная коммутация обмоток. Каждая обмотка:
- отключается от источника напряжения,
- подключается в прямой полярности
- подключается с противоположной полярностью.

Для такой коммутации требуется сложный мостовой драйвер. Примером такого устройства является микросхема L298N. Микросхема обеспечивает ток коммутации до 2 А. Если нужны большие токи, то задача управления биполярным двигателем еще усложняется.
Существует другой способ изменения магнитного поля в статоре с гораздо более простой схемой коммутации. Это применение двигателя с униполярными обмотками.
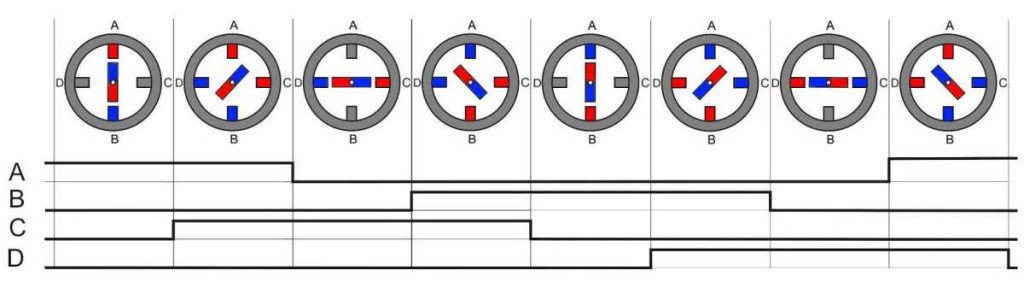
Схема двух фазного шагового двигателя с униполярными обмотками и последовательность коммутаций обмоток выглядит так.

У всех четырех обмоток один вывод подключен к плюсовому выводу источника питания. А другие выводы A,B,C,D последовательно коммутируются к минусовому сигналу. Соответствующие обмотки создают магнитное поле, и ротор поворачивается вслед за ним.
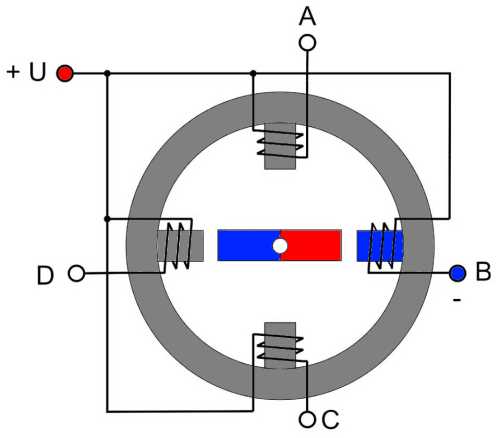


Для коммутации обмоток таким способом достаточно четырех ключей, замыкающих обмотки на землю. Ключи часто управляются непосредственно с выводов микроконтроллеров.
|
|
|
Иногда средние выводы обмоток конструктивно объединены внутри двигателя, иногда выводятся все выводы отдельно. Кстати, это не повод называть двигатель четырехфазным. Все равно он будет двухфазным.

Биполярный двигатель обеспечивает, при тех же размерах, больший крутящий момент, по сравнению с униполярным. Оно и понятно. Одновременно в униполярном двигателе работает только одна обмотка, вместо двух. Выигрыш в моменте у биполярного составляет около 40%.
Зато, если нет необходимости использовать двигатель на полную мощность, униполярным двигателем гораздо проще управлять.
Разновидности шаговых двигателей
Основные виды шаговых двигателей:
- с переменным магнитным сопротивлением
- с постоянными магнитами
- гибридные.
Шаговые двигатели с переменным магнитным сопротивлением
У двигателей с переменным магнитным сопротивлением в роторе нет постоянных магнитов. Их ротор выполнен из магнитомягкого материала и имеет зубчатую форму. Магнитный поток замыкается через ближайшие к полюсам статора зубцы. Зубцы притягиваются к полюсам. Этим и обеспечивается вращение.
При тех же размерах, двигатели с переменным магнитным сопротивлением имеют меньший крутящий момент, чем другие типы шаговых двигателей.
Применяются они довольно редко. Я знаю только одну фирму, которая использовала такие двигатели. Я разрабатывал управление для них. Выбор двигателей именно с переменным магнитным сопротивлением был обусловлен тем, что фирма сама изготавливала все детали двигателя. А сделать ротор для привода такого вида намного проще, потому что в нем не используются постоянные магниты.
Двигатели с постоянными магнитами
У шаговых двигателей этого вида ротор содержит постоянные магниты. Общий принцип действия шагового двигателя я объяснял на двигателе с постоянным магнитом. Только в реальных двигателях магнитов больше. Вот пример двигателя с тремя парами полюсов ротора.
У реальных двигателей с постоянными магнитами число шагов на оборот доходит до 48, что соответствует углу шага 7,5 °.
Гибридные двигатели
Гибридные двигатели обеспечивают меньшую величину шага, больший момент и скорость. Число шагов на оборот для такого типа двигателей доходит до 400 (угол шага 0,9°).
При этом они более сложные в изготовлении и более дорогие. Я не хочу забивать читателю голову конструкцией этих двигателей. У них есть и зубчатый ротор, и постоянные магниты. По принципу действия гибридные двигатели эквивалентны двигателям с постоянными магнитами, но с гораздо большим числом полюсов.
Это самый распространенный тип шаговых двигателей.
Управление шаговым двигателем
Существуют три режима управления шаговым двигателем:
- полношаговый
- полушаговый
- микрошаговый.
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском onephaseonfullstep – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора.

Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-onfullstep – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки..

Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага.
Полушаговый режим.
Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора. Каждый второй шаг включается одна фаза, а между ними - включаются сразу две.
В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов. Полный момент получить в полушаговом режиме не удается. Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий. Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Микрошаговый режим.
Для получения еще большего числа шагов двигателя применяют микрошаговый режим. Включают две фазы, как на полушаговом режиме, но токи обмоток распределяют не равномерно. Магнитное поле статора смещается между полюсов, смещается и положение ротора. Как правило, диспропорция токов между рабочими фазами происходит с определенной дискретностью, микрошагом. Бывают микрошаги с величиной треть от полного шага. Бывают значительно больше. Я разрабатывал систему управления индукторным приводом, так там было больше 1000 микрошагов.
Микрошаговый режим способен значительно повысить точность позиционирования шагового двигателя. Хотя система управления приводом становится намного сложнее.
Недостатки и достоинства шаговых двигателей.
Преимущества шаговых двигателей.
- Точное позиционирование без обратной связи. Число импульсов определяет угол поворота.
- Двигатель обеспечивает полный крутящий момент при снижении скорости вращения, вплоть до остановки.
- Двигатель фиксирует свое положение при остановке за счет тока удержания.
- Регулировка скорости вращения с высокой точностью без обратной связи.
- Способность быстрого старта, остановки, реверса.
- Высокая надежность. Отсутствие коллекторных щеток.
Недостатки шаговых двигателей.
- Сложная система управления.
- Невысокие скорости вращения.
- Возможно явление резонанса.
- Может произойти потеря позиционирования при механических перегрузках.
- Низкая удельная мощность.
Как и всему на свете шаговому двигателю присущи определенные достоинства и недостатки. Но есть области в точной механике, в которых он просто незаменим. Там где надо перемещать механические узлы, мгновенно останавливать, двигать назад, регулировать скорость... Попробуйте мгновенно остановить коллекторный двигатель, и вы забудете о недостатках шагового. Попробуйте реализовать изменение скорости коллекторного двигателя в широких пределах. Проще поставить шаговый с его недостатками.
Характеристики шаговых двигателей.
Шаговый двигатель с точки зрения механики и электротехники очень сложное устройство, имеющее много механических и электрических параметров. Приведу расшифровку основных технических параметров, которые используются на практике.
- Количество полных шагов за один оборот. Основной параметр двигателя, определяющий его точность, разрешающую способность, плавность движения. На двигателях серии FL57 этот параметр составляет 200 и 400 шагов на оборот.
- Угол полного шага. Представление в другом виде предыдущего параметра. Показывает на какой угол повернется вал при одном полном шаге. Может быть подсчитан как 360° / количество полных шагов за оборот. Для двигателей серии FL57 составляет 1,8 ° и 0,9°.
- Номинальный ток. Основной электрический параметр. Наибольший допустимый ток, при котором электродвигатель может работать сколь угодно длительное время. Для этого тока указаны механические параметры двигателя.
- Номинальное напряжение. Допустимое постоянное напряжение на обмотке двигателя в статическом режиме. Часто этот параметр не приводится. Вычисляется по закону Ома через номинальный ток и сопротивление обмотки.
- Сопротивление обмотки фазы. Сопротивление обмотки двигателя на постоянном токе. Параметр вместе с номинальным током, показывает какое напряжение можно подавать на обмотку двигателя.
- Индуктивность фазы. Параметр становится важным на значительных скоростях вращения. От него зависит скорость нарастания тока в обмотке. При высоких частотах переключения фаз приходится увеличивать напряжение, чтобы ток нарастал быстрее.
- Крутящий момент. Основной механический параметр. Показывает максимальный крутящий момент, который способен создать двигатель. Иногда приводится механическая характеристика в виде зависимости крутящего момента от частоты вращения.
- Момент инерции ротора. Характеризует механическую инерционность ротора двигателя. Чем этот параметр меньше, тем двигатель быстрее разгоняется.
- Удерживающий момент. Это крутящий момент при остановленном двигателе. При этом у двигателя должны быть запитаны две фазы номинальным током.
- Стопорный момент. Момент, необходимый чтобы провернуть вал двигателя при отсутствующем напряжении питания.
- Сопротивление изоляции. Как у всех электрических приборов – сопротивление между корпусом и обмотками.
- Пробивное напряжение. Минимальное напряжение, при котором происходит пробой изоляции между обмотками и корпусом. Параметр из раздела электробезопасности.
Реакция якоря машины постоянного тока
Магнитный поток в машине постоянного тока создается всеми ее обмотками, по которым протекает ток. В режиме холостого хода по обмотке якоря генератора ток не протекает, а по обмотке якоря двигателя протекает ток холостого хода, небольшой по значению. Поэтому в машине существует только основной магнитный поток Ф0, создаваемый обмоткой возбуждения полюсов и симметричный относительно их осевой линии (рис. 1, а).
На рис. 1, а (коллектор не показан) щетки расположены рядом с проводниками обмотки якоря, от которых идут отпайки к темколлекторным пластинам, с которыми в данный момент соединены щетки. Такое положение щеток называется положением на геометрической нейтрали, т. е. на линии, проходящей через центр якоря и проводники обмотки, в которых индуцируемая основным магнитным потоком э. д. с. равна нулю. Геометрическаянейтраль перпендикулярна осевой линии полюсов.
Когда к обмотке якоря генератора присоединена нагрузка Rn или когда на вал двигателя действует тормозной момент, по обмотке протекает ток якоря 1Я, который создает магнитный поток якоря Фя (рис. 1, б). Магнитный поток якоря направлен по линии, на которой расположены щетки. Если щетки расположены на геометрической нейтрали, то поток якоря направлен перпендикулярно основному магнитному потоку и поэтому называется поперечным магнитным потоком.

Рис. 1. Магнитные потоки в машине постоянного тока: а — магнитный поток полюсов; б — магнитный поток обмотки якоря; в — результирующий магнитный поток
Влияние магнитного потока якоря на основной магнитный поток называется реакцией якоря. В генераторе постоянного тока под «сбегающим» краем полюса магнитные потоки складываются, под «набегающим» — вычитаются. У двигателя — наоборот. Таким образом под одним краем полюса результирующий магнитный поток Ф увеличивается по сравнению с основным магнитным потоком, под другим краем полюса — уменьшается. В результате он становится несимметричным по отношению к осевой линии полюсов (рис. 1, в).
Физическая нейтраль — линия, проходящая через центр якоря и проводники обмотки якоря, в которых индуцируемая результирующим магнитным потоком э. д. с. равна нулю, поворачивается на угол а по отношению к геометрической нейтрали (в сторону опережения у генераторов, в сторону отставания — у двигателей). При холостом ходе физическаянейтраль совпадает с геометрической.
В результате реакции якоря магнитная индукция в зазоре машины становится еще более неравномерной. В проводниках якоря, находящихся в точках повышенной магнитной индукции, индуцируется большая э. д. с, что приводит к увеличению разности потенциалов между соседними пластинами коллектора и к возникновению искрения на коллекторе. Иногда электрическая дуга перекрывает весь коллектор, образуя «круговой огонь».
Кроме того, реакция якоря приводит к уменьшению э. д. с. якоря, если машина работает в области, близкой к насыщению. Это связано с тем, что когда основной магнитный поток Ф0 создает насыщенное состояние магнитопровода, то увеличение магнитного потока на +ΔФ под одним краем полюса будет меньшим, чем уменьшение на —ΔФ под другим (рис. 2). Это приводит к уменьшению суммарного потока полюса и э. д. с. якоря, так как

Отрицательное влияние реакции якоря можно уменьшить, сдвигая щетки на физическуюнейтраль. При этом поток якоря поворачивается на угол α и встречный поток под набегающим краем полюса генератора уменьшается. Сдвиг щеток осуществляют у генератора по направлению вращения якоря, а у двигателя — против направления вращения якоря. Угол α меняется с изменением тока якоря Iя. На практике щетки обычно устанавливают на угол, соответствующий средней нагрузке.
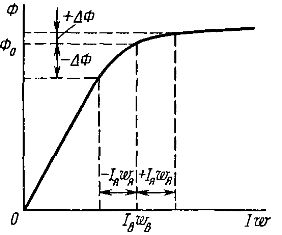
Рис. 2. Влияние степени намагничивания на результирующий магнитный поток ( Iв•wв – м.д.с обмотки возбуждения; Iя•wя – м.д.с обмотки якоря).
В машинах средней и большой мощностей применяют компенсационную обмотку, расположенную в пазах главных полюсов и включаемую последовательно с обмоткой якоря так, чтобы ее магнитный поток Фк был противоположен магнитному потоку Фя. Если при этом Фк = Фя, то магнитный поток в воздушном зазоре из-за реакции якоря практически не искажается.
Задача №1
Статор трехфазной бесколлекторной машины переменного тока с внутренним диаметром D1, длинной l1, имеет число пазов Z1 число полюсов 2р.
Определить ЭДС одной фазы обмотки статора, если шаг обмотки по пазам y1=Ʈ, число витков в катушке wk, магнитная индукция в воздушном зазоре машины Вβ, а частота тока в питающей сети 50 Гц.

Алгоритм:

Задача №2
Используя данные первой задачи , определить ЭДС фазной обмотки статора (основной ) гармоники, обмотку выполнить укороченным шагом. Рассчитать линейную ЭДС основной гармоники при соединениях обмотки статора «звезда» и « треугольник» . На сколько будут ослаблены ЭДС пятой и седьмой гармоник при принятом укорочении шага на число пазов.


СПИСОК ЛИТЕРАТУРЫ
1.VashTeehnik.ru
2.ElectricalSchool.info
3.Электронный учебник "Электрические машины"
4.Кацман М.М. Электрические машины.
Дата добавления: 2018-02-28; просмотров: 418; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!