Энергетический баланс асинхронного двигателя
Комплексная мощность трехфазного асинхронного двигателя j?l — +jQi — ЗС/^сойф! + fiUiIism^pi,
где РьQi — активная и реактивная мощности двигателя.
Активная мощность двигателя Рх определяет среднюю мощность необратимого преобразования в двигателе электрической энергии, получаемой из трехфазной сети, в механическую, тепловую и другие виды энергии, а реактивная мощность Qx— максимальную мощность обмена энергией между источником и магнитным полем двигателя.
Активная мощность и КПД двигателя. Диаграмма преобразования энергии в двигателе показана на рис. 14.20. В ней исходной величиной является активная мощность Рг = 3 f/^coscpj потребления электрической энергии из трехфазной сети.
|
|
Часть этой мощности Рмр1 составляет мощность потерь на нагревание проводов обмотки статора. Остальная мощность преобразуется в мощность вращающегося магнитного поля Р|ф ,„ часть которой Рс составляет мощность потерь из-за гистерезиса и вихревых токов в сердечнике статора. Мощность потерь в сердечнике ротора, через который замыкается вращающийся магнитный поток, практического значения не имеет, так как частота /2 тока в роторе весьма мала (1 — 3 Гц) и мощность потерь из-за гистерезиса и вихревых токов незначительна.
Оставшаяся часть мощности вращающегося магнитного поля составляет электромагнитную мощность ротора Рэм = рврл1 — Рс. Наконец, чтобы определить механическую мощность Рмсх, развиваемую ротором, из электромагнитной мощности нужно вычесть мощность потерь на нагревание проводов обмотки ротора Рпр2. Следовательно,
|
|
|
Р — Р — Р
| п Рис. 14.20 |
1 мех 1 1 л и
ир1 £ нр2*
Полезная механическая мощностьР2на валу двигателя будет меньше механической мощности Рмех из-за механических потерь РМЛ1в двигателе, т.е.
Р — Р — Р
1 2 1 мех м.и*
Отношение полезной механической мощности Р2на валу двигателя к активной мощности Ргпотребления электрической энергии из сети определяет КПД асинхронного двигателя
Т1 =P2/Pi-
Коэффициент полезного действия современных трехфазных асинхронных двигателей при номинальном режиме работы составляет 0,8-0,95.
| р, |
| пр1 |
| (I, fL |
| ТТ |
| ТТ |
| Рг. |
Реактивная мощность и коэффициент мощности двигателя. Реактивная мощность Qi характеризует обратимый процесс обмена энергией между магнитным полем двигателя и источником. Так как необходимость магнитного поля обусловлена принципом действия асинхронного двигателя, то неизбежно наличие реактивной мощности двигателя.
| (14.21) |
При проектировании и эксплуатации асинхронных двигателей представляет интерес соотношение между активной и реактивной мощностями, которое определяется коэффициентом мощности:
|
|
|
cos =pjjp* + QI.
Анализ уравнения электрического состояния фазы статора (14.116) показывает, что при постоянном значении напряжения Ux между выводами фазной обмотки статора и тока Ix^ /1ном магнитный поток вращающегося поля двигателя Фв также постоянен и не зависит от ее нагрузки. Это означает, что энергия, запасаемая в магнитном поле асинхронного двигателя, и реактивная мощность двигателя также постоянны и не зависят от его нагрузки. Но так как с ростом нагрузки активная мощность двигателя увеличивается, то из (14.21) следует, что с ростом нагрузки и коэффициент мощности
двигателя увеличивается. Если при отсутствии нагрузки на валу двигателя коэффициент мощности асинхронного двигателя равен 0,1 — 0,15, то при номинальной нагрузке двигателя коэффициент мощности, как указывалось, достигает 0,8 — 0,95.
Вращающий момент асинхронного двигателя
Выражение для вращающего момента асинхронного двигателя можно получить из формулы для механической мощности Рмех на валу двигателя:
Мф = Рме>р, (14.22)
где ujp— угловая скорость ротора.
Так как и;р = 2тт/60, то, следовательно, связь между угловыми скоростями магнитного поля и;п двигателя и ротора и;р определяется скольжением
|
|
|
S= (щ-п)/щ = (ып - Wp)/un,
или
Up = 4,(1 -s).
Угловая скорость магнитного поля и>„ равна угловой частоте синусоидального тока в фазных обмотках статора и для двухполюсного двигателя (р — 1). В общем случае многополюсного двигателя
W„ = w/p,
где р — число пар полюсов.
Подставив в (14.22) выражение и>р через и, получим
MBp=^-LpMex. (14.23)
Из анализа схемы замещения фазы двигателя (рис. 14.18) известно, что механическая мощность на валу
Рмех = Ш'2{1>2? = 3R'B21-^(I'2)2= RB2m2~r~ tf- (14-24>
s ь
Подставив значение механической мощности на валу двигателя из (14.24) в (14.23), получим выражение вращающего момента:
Мвр =m2pRB2Ii/us, (14.25)
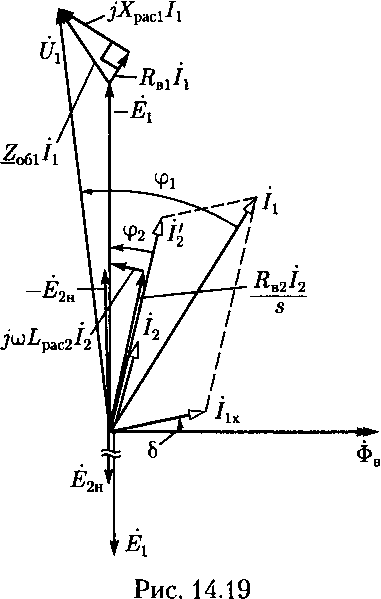
а так какRb2I2= E2cosy)2,что следует из векторной диаграммы фазы ротора (см. рис. 14.16), a E2/s=E2wто
Мвр=Я2Л^со8ф2. (14.26)
Чтобы ввести в выражение момента на валу (14.26) значение магнитного потока вращающегося поля, заменим согласно (14.17)
Е2п = 4,44МА;оГ)2Фв = ^w2k^B/ V2
и получим
Мвр = -j=m2pw2k^BI2c oscp2= const • Фв/2cos ф2> (14.27)
т. е. вращающий момент двигателя пропорционален произведению потока вращающегося магнитного поля и тока в обмотке ротора.
|
|
|
Дата добавления: 2018-02-28; просмотров: 1152; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!