Описание и технические характеристики робота.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное автономное образовательно учреждение высшего образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Политехнический институт
Факультет энергетический
Кафедра «Электропривод и мехатроника»
Направление «Мехатроника и робототехника»
ИССЛЕДОВАНИЕ РОБОТИЗИРОВАННОГО МАНИПУЛЯТОРА DOBOT MAGICIAN
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОЙ РАБОТЕ
| По дисциплине «Механика и динамика манипуляторов» ЮУрГУ — 15.04.06 ПЗ КР Руководитель работы преподаватель, ст.п ____________Т.А. Лисовская ____________________2021 г. Автор работы студент группы П-168 _____________Т.Ю. Гарипов ____________________2021 г. Работа защищена с оценкой ____________________2021 г. |
Челябинск 2021
Министерство НАУКИ И ВЫСШЕГО образования российской федерации
Федеральное государственное автономное образовательно учреждение высшего образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Институт Политехнический институт
Факультет Энергетический
Кафедра Электропривода и мехатроники
Направление 15.04.06 «Мехатроника и робототехника»
ЗАДАНИЕ
НА КУРСОВУЮ РАБОТУ
|
|
|
Студенту группы П-168 Гарипову Тимуру Юнусовичу
1 Тема работы
| Исследование роботизированного манипулятора DOBOT MAGICIAN |
2 Срок сдачи студентом законченной работы 28.12.2021.
3 Содержание расчетно-пояснительной записки (перечень подлежащих разработке вопросов)
| Введение |
| 1. Структурный анализ робота |
| 1.1 Описание и технические характеристики робота |
| 1.2 Степени подвижности и класс механизма |
| 1.3 Кинематическая схема робота манипулятора |
| 2. Решение прямой и обратной задачи кинематики |
| 3. Решение прямой и обратной задачи динамики |
| 4. Моделирование робота в цифровой среде |
| Заключение |
| Список используемой литературы |
4 Перечень графического и иллюстративного материала
| 1. Кинематическая схема робота манипулятора |
| 2. Модель робота в среде Simulink |
Всего 2 листа
Руководитель КР_______________ _ __ __
подпись Должность, звание Фамилия И.О.
Консультант КР_______________ _ __ __
подпись Должность, звание Фамилия И.О.
|
|
|
Дата выдачи задания «10» сентября 2021 г.
Задание принял к исполнению студент ______________ _ __
подпись Фамилия И.О.
АННОТАЦИЯ
Гарипов Т.Ю, Исследование роботизированного манипулятора DOBOT MAGICIAN – Челябинск: ЮУрГУ, П; 2021, стр. 26, 7 ил., 2 табл., библиогр. список – 5 наим.
В данной работе исследуется робот-манипулятор DOBOT MAGICIAN.
Исследование заключается в определение структуры робота, проведении кинематического анализа, в том числе решение прямой и обратной задач кинематики, а также выполняется динамический анализ робота, то есть определяются параметры уравнения движения робота.
Результаты вычислений использованы для моделирования кинематики робота в среде MATLAB (Simulink).
СОДЕРЖАНИЕ
ВВЕДЕНИЕ. 5
1. 1 СТРУКТУРНЫЙ АНАЛИЗ РОБОТА………………………………………..6
1.1 Описание и технические характеристики………………………………….6
1.2 Степени подвижности и класс механизма.....................................................7
1.3 Кинематическая схема робота манипулятора……………………………...8
2. 2 РЕШЕНИЕ ПРЯМОЙ И ОБРАТНОЙ ЗАДАЧ КИНЕМАТИКИ…………..10
2.1 Решение прямой задачи кинематики………………………………………………………10
|
|
|
2.2 Решение обратной задачи кинематики…………………………………………………..14
3. 3 РЕШЕНИЕ ПРЯМОЙ И ОБРАТНОЙ ЗАДАЧИ ДИНАМИКИ.. 18
3.1 Метод Эйлера-Лагранжа ……………………..……………………..……18
3.2 Математическая динамическая модель манипулятора. 19
4. 4 МОДЕЛИРОВАНИЕ РОБОТА В ЦИФРОВОЙ СРЕДЕ. 23
ЗАКЛЮЧЕНИЕ. 25
БИБЛИОГРАФИЧЕСКИЙ СПИСОК.. 26
ВВЕДЕНИЕ
Специалист по направлению подготовки «Мехатроника и робототехника» должен уметь разрабатывать мехатронные и робототехнические системы в соответствии с исходными данными и техническим заданием. В разработку таких систем входит также разработка управляющих алгоритмов и программ.
Для обучения программированию промышленных роботов-манипуляторов применяются современные дорогостоящие манипуляторы. Наиболее известными производителями таких роботов являются KUKA AG, FANUC, ABB Robotics, MitsubishiElectric и др. Также в ряде образовательных организаций имеются оставшиеся еще с советских времен манипуляторы типа PM-01 (PUMA-560) с системой управления «Сфера-36». Программирование роботов осуществляется с использованием специальных сред и языков программирования, например, роботов ABB - языка RAPID, KUKA – языка KRL (KukaRoboticLanguage). Однако, для написания таких управляющих программ необходимы как хорошие навыки разработки алгоритмов и программы, так и знания принципов функционирования и кинематики робота. Поэтому процесс обучения программированию реального промышленного робота достаточно трудоемкий и затратный, так как требует наличие самого дорогостоящего робота или симуляторов. Как альтернатива для первичного обучения могут быть использованы недорогие учебные роботы, позволяющие освоить базовые принципы и методы программирования на «классических» языках, например, на C++ или Python. Данная работа описывает принцип работы с одним из таких роботизированных учебных манипуляторов Dobot Magician (далее манипулятор), представленный на рисунке 1 [1]. Компания разработчик в комплекте с роботом предлагает специальное программное обеспечение, позволяющее производить программирование простейших движений и технологических операций. Однако разработчики не предоставляют описание его математической модели, необходимой для определения координат рабочего органа, разработки законов его перемещения и расчета управляющих воздействий.
|
|
|
СТРУКТУРНЫЙ АНАЛИЗ РОБОТА
Описание и технические характеристики робота.
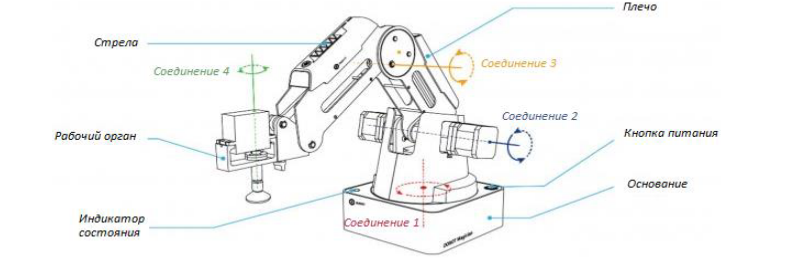
Рисунок 1. Роботизированный манипулятор Dobot Magikian.
Манипулятор Dobot Magikian призван моделировать реальные промышленные объекты: конвейерное производство, перемещение объектов, 3D-печать, лазерную гравировку и т.д. При этом он мобилен за счет небольшого размера, понятен и прост в управлении.
Робот-манипулятор состоит из следующих частей (снизу-вверх): основание, плечо, стрела и рабочий инструмент. Все они соединены между собой посредством сервоприводов (соединение 1, соединение 2, соединение 3, соединение 4 соответственно), что позволяет достичь большого объема рабочей зоны робота-манипулятора, рисунок 1.
Управление роботом-манипулятором может осуществляться при помощи компьютера. Для лучшего понимания работы соединений подключите робот манипулятор к компьютеру при помощи USB-кабеля и запустите фирменное ПО «DobotStudio».
Комплектация DOBOT Magician:
1. 4-х осевой образовательный манипулятор;
2. Захват механический с пневматическим приводом;
3. Захват вакуумный;
4. Захват для пишущего инструмента;
5. Экструдер для 3D-печати;
6. Лазерный модуль гравировки;
7. Пульт управления;
8. Bluetooth-модуль;
9. Wi-Fi-модуль;
10. Комплект методических материалов и заданий.
Спецификация:
· Количество осей – 5
· Грузоподъёмность – 500 г
· Макс. расстояние – 320 мм
· Точность повторных действий: 0,2 мм
· Подключение: USB / WI-FI / Bluetooth
· Питание внешнее: 100–240В, 50/60 Гц
· Питание внутреннее: 12 В / 7А
· Потребление: 60 Вт Макс
· Температурный режим работы: 10–60°C
Дата добавления: 2022-11-11; просмотров: 190; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!