Исследования модели двигателя в Simulink
 Matlab имеет виртуальную модель двигателя постоянного тока (DC Machine) в библиотеке SimPowerSystems (рис. 3).
Matlab имеет виртуальную модель двигателя постоянного тока (DC Machine) в библиотеке SimPowerSystems (рис. 3).
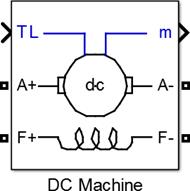
Рис. 3. Виртуальная модель двигателя постоянного тока в Matlab
Выводы F+ и F– служат для подключения напряжения возбуждения в целях создания магнитного потока в машине. Выводы A+ и A– используются для подключения обмотки якоря на силовой источник питания. Активная нагрузка на двигатель вводится через виртуальный вход TL. Выходные параметры двигателя: частота вращения ω, ток обмотки якоря Ia, ток возбуждения If и электромагнитный момент Te формируются на мультиплексорной шине m. Чтобы получить доступ к выходным параметрам, необходимо использовать демультиплексор на четыре выхода и соединить его вход с точкой m. Тогда на первом (верхнем) выходе действует частота вращения, на втором – ток обмотки
якоря, на третьем – ток возбуждения и на четвёртом – электромагнитный момент двигателя.
Ввод параметров двигателя осуществляется через диалоговые окна (графический интерфейс), которые открываются двойным щелчком по изображению двигателя в схеме модели (рис. 4).
Рис. 4. Диалоговые окна ввода параметров двигателя
В Simulink имеется небольшая библиотека двигателей постоянного тока в виде 23 вариантов, из которых 21–23 не вызываются. На рис. 4 показаны следующие данные двигателя:
• R a – активное сопротивление цепи якоря, включающее
сопротивление обмотки якоря, сопротивление щёточно-коллекторного узла и активное сопротивление обмотки дополнительных полюсов. Величина
|
|
|
суммарного сопротивления якорной цепи, если нет данных, приближенно определяется по формуле
R = 0,5(1 -h
)U н ;

|
н
• L a – индуктивность рассеяния цепи обмотки якоря, включающая
индуктивность рассеяния обмотки якоря и индуктивное сопротивление обмотки дополнительных полюсов. Если нет данных, индуктивность рассеяния якорной цепи двигателя может быть вычислена по приближенной формуле
L = g
U н ,

a p w I
н н
где U н – номинальное напряжение обмотки якоря двигателя;
I н – номинальный
ток обмотки якоря;
w н – номинальная частота вращения якоря; р – число пар
полюсов двигателя; g – коэффициент;
g = 0,6
– для некомпенсированных
машин; g = 0, 25
– для компенсированных машин;
• R f
• L f
– активное сопротивление обмотки возбуждения двигателя;
– индуктивность обмотки возбуждения двигателя. Ее можно
определить по кривой намагничивания цепи возбуждения при известном значении числа витков катушки полюса W в как
L f = 2 pW в
s DФ ,
 DI
DI
f
где p – число пар полюсов; W в – число витков на полюс независимой обмотки
|
|
|
возбуждения;
s =1,2
– коэффициент рассеяния обмотки главных полюсов;
DФ,DI f
– приращение потокосцепления и тока возбуждения на определенном
участке кривой намагничивания электрической машины;
• L af
– взаимная индуктивность обмоток возбуждения и обмотки
якоря двигателя. Определяется взаимная индуктивность по номинальным параметрам двигателя как
L = K E
= U н - R a I aн
= U н - R a I aн ,


|
f н f
w U fн н R


|
где KE – постоянная эдс двигателя, так как
E = K E w ,
Е – противоЭДС двигателя;
U fн
– номинальное напряжение возбуждения; J -
приведенный к валу двигателя момент инерции, включающий момент инерции двигателя и момент инерции производственного механизма; Bm – коэффициент, с помощью которого вводится на вал двигателя реактивный момент
сопротивления, определяемый как
сопротивления.
Т m = B m × w;
Т f – реактивный момент
Следует отметить, что редактирование вводимых параметров (изменение числовых значений) возможно только тогда, когда в строке Preset model (рис. 4) будет выбрана процедура No.
Для примера рассмотрим модель пуска двигателя. Ограничение пускового тока достигается введением резистора в цепь обмотки якоря. Схема модели показана на рис. 5. Источники питания обмотки возбуждения и обмотки якоря выбраны управляемыми, чтобы можно было с помощью блока Step реверсировать или изменять величину постоянного напряжения.
|
|
|
На выходах демультиплексора действуют сигналы частоты вращения, тока двигателя, тока обмотки возбуждения и электромагнитного момента. Прибор Scope фиксирует изменение во времени подаваемых на его входы сигналов и строит диаграммы (осциллограммы). Блок powergui является инструментом графического интерфейса пользователя, без которого блоки из библиотеки SimPowerSystem не могут использоваться.
Введённые параметры двигателя показаны на рис. 4. Сопротивление Series RLC Branch выбирается из библиотеки Elements, затем отключаются индуктивная и емкостная составляющие цепи. Номинал добавочного сопротивления - 10 Ом.
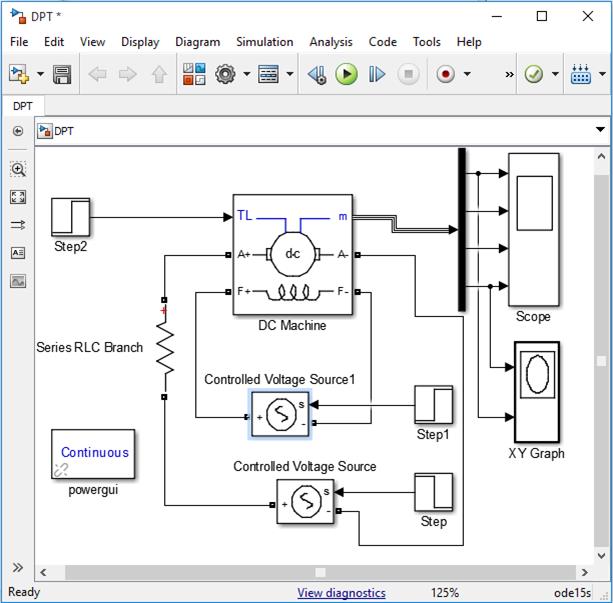
Рис. 5. Модель пуска и реверса двигателя постоянного тока в оболочке Simolink
Выбранное время моделирования – 2 с, вводится в окно, рядом с которым находятся кнопки «Стоп» и «Пуск» моделирования.
Параметры системы, обеспечивающие процесс моделирования, задаютс я в диалоговом окне при выборе в главном меню процедуры Simulation и команды ConFiguration Parameters (рис. 6) [1, 2, 3].
|
|
|
Рекомендуется начать исследования с использованием численного метода ode15s. Остальные параметры по умолчанию. Блок Scope позволяет одновременно наблюдать изменение частоты вращения, тока, тока возбуждения и момента двигателя.
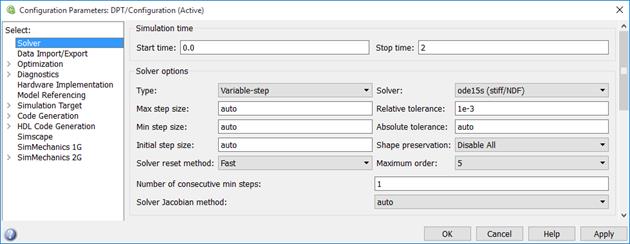
Рис. 6. Параметры системы моделирования
Прибор XY Graph формирует статическую механическую характеристику двигателя по динамическим характеристикам частоты вращения и момента. Блок Step задаёт напряжения на обмотке якоря двигателя: +240 В во времени 0...1 с и –240 В от 1 до 2х с. Блок Step1 задаёт напряжение на обмотке возбуждения 300 В. Заметим, что здесь возможны два результата. Если для источника обмотки возбуждения установлено напряжение (см. рис. 7), то настройки блока Step1 не воспринимаются, и при нулевом времени действует ток возбуждения установившегося значения.
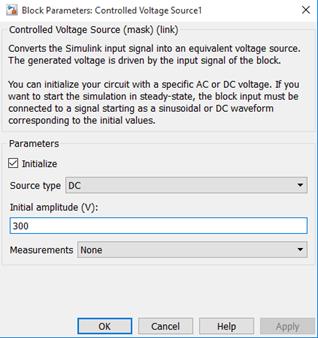
Рис. 7. Настройка источника обмотки возбуждения
Если флажок в окне Initialize убран, то начальное значение тока возбуждения равно нулю, и после протекания переходного процесса устанавливается ток, обусловленный напряжением, заданным в блоке Step1. Блок Step2 задаёт активный момент нагрузки TL, равный, например, 5 Н × м.
Рассмотрим моделирование процессов пуска и реверса при заданном
начальном значении тока возбуждения.
Запускаем процесс моделирования нажатием кнопки в виде зачернённого треугольника. После окончания моделирования прослушивается звуковое предупреждение, затем двойным щелчком открывается лицевая панель осциллографа Scope. Изображения в окне осциллографа представлены желтыми кривыми на черном фоне и поэтому не пригодны для вывода на печать без обработки.
Для того чтобы обеспечить доступ к редактированию полученной диаграммы, необходимо выполнить следующие операции:
- в настройках Scope на вкладке History снять ограничение на запись 5000
точек и разрешить сохранять результаты осциллографирования в рабочую область (WorkSpace) в формате Structure with time (структура с дополнительной переменной времени) (рис. 8). Наименование переменных, передаваемых в WorkSpace, указывается в окне Variable name, по умолчанию ScopeData;
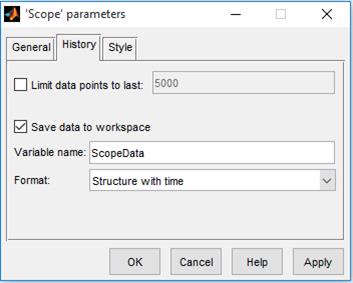
Рис. 8. Окно настройки цифрового осциллографа Scope
- после моделирования выполнить в командном окне Matlab команду plot(x,у,x1,y1,…,xn,yn). В зависимости от входных аргументов функция plot позволяет строить один или несколько графиков, изменять цвет и стиль линий и добавлять маркеры на каждый график. Когда требуется сравнить поведение двух функций, значения которых сильно отличаются друг от друга, применяют функцию plotyy(x1,y1,x2,y2), которая выводит графики в окно с двумя вертикальными осями, имеющими подходящий масштаб. Для размещения нескольких графиков в одном графическом окне используется команда subplot(i,j,n). Здесь i и j – число подграфиков по вертикали и горизонтали, а n – номер подграфика, который надо сделать текущим. Номер отсчитывается от левого верхнего угла построчно.
Например, чтобы вывести все переменные двигателя ScopeData (рис. 8) в одно окно, но отдельными графиками, необходимо выполнить следующий набор команд:
>>subplot(4,1,1)
>> plot(ScopeData.time,ScopeData.signals(1).values)
>>subplot(4,1,2)
>> plot(ScopeData.time,ScopeData.signals(2).values)
>>subplot(4,1,3)
>> plot(ScopeData.time,ScopeData.signals(3).values)
>>subplot(4,1,4)
>> plot(ScopeData.time,ScopeData.signals(4).values).
Результат выполнения команд представлен на рис. 9. На верхней части диаграммы появляется главное меню и возможность редактирования. Выбирается в меню View команда Property Editor и устанавливаются необходимые свойства диаграммы: надписи, цвет фона, цвет и толщина линий осциллограмм.
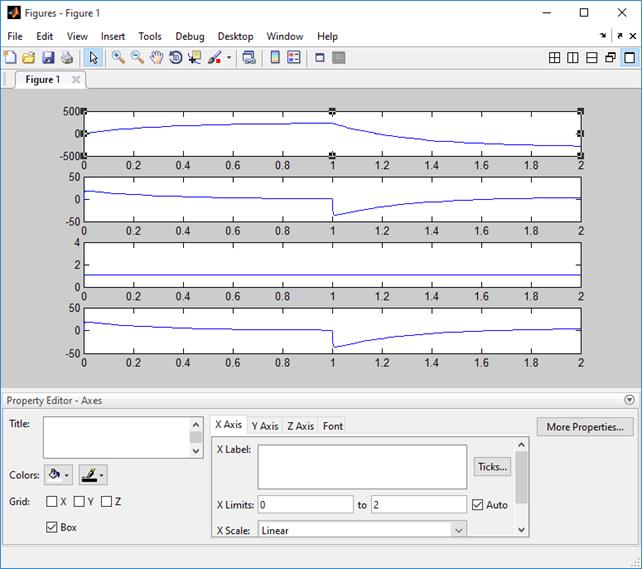
Рис. 9. Графический редактор Matlab
После редактирования необходимо выйти из команды Property Editor. Для оцифровки нужных точек осциллограмм в меню Tools выбрать команду Data Cursor. На курсоре появляется перекрестие, с помощью которого назначается координата обрабатываемой точки. Но прежде необходимо разрешить произвольный выбор нужной координаты. Двойным щелчком правой кнопки мыши открывается динамическое меню, в котором выбирается команда Selection Style и назначается выбор позиции мышью (Mouse Position). После оцифровки выбранной точки нужно разрешить обработку следующей точки, вызвав динамическое меню и выбрав команду Create Now Datatip. По окончании процесса оцифровки закрыть команду Data Cursor.
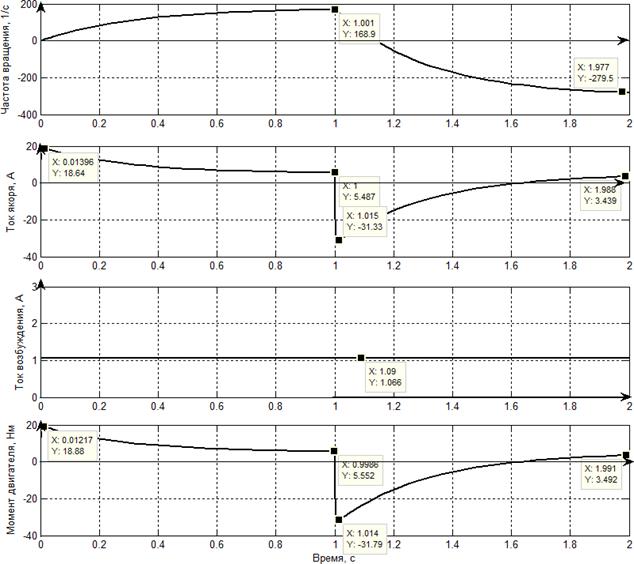
Рис. 10. Отредактированная диаграмма пуска и реверса двигателя
Результаты моделирования, представленные в виде диаграммы на рис. 9, после редактирования выглядят, например, как на рис. 10.
В первую очередь отметим, что ток возбуждения в начале моделирования соответствует установившемуся значению. В реальных приводах постоянного тока порядок включения таков, что сначала подаётся напряжение на обмотку возбуждения, а потом запускается двигатель в работу. Пуск двигателя осуществляется через токоограничивающий резистор. Пусковой ток достигает значения 18,64 А и снижается по мере разгона двигателя до значения 5,487 А (следует иметь в виду, что теоретически процесс пуска ещё не закончился). Частота вращения достигла величины 168,9 1/с.
В момент времени, соответствующий одной секунде, произведен реверс путем изменения полярности напряжения на обмотке якоря. Ток двигателя меняет знак на противоположный и достигает значения –31,33 А. Начинается процесс интенсивного уменьшения частоты вращения (торможения) двигателя. Двигатель разгоняется до частоты вращения –279,5 1/с, и ток достигает величины +3,439 А. Это свидетельствует о том, что момент нагрузки TL, действующий на двигатель, имеет активный характер и переводит двигатель в режим генераторного торможения. Отрицательная частота вращения двигателя значительно превышает абсолютное значение положительной частоты вращения.
Одновременно с окончанием моделирования появляется лицевая панель графопостроителя XY Graph. После выполнения в командном окне команды
>> plot(ScopeData.signals(4).values, ScopeData.signals(1).values) появляется главное меню графопостроителя и открывается доступ к редактированию полученной диаграммы.
Выбирается в меню View команда Property Editor, и устанавливаются необходимые свойства диаграммы: надписи, цвет фона, цвет и толщина линии осциллограммы. Но сначала следует установить масштабы по осям. Наиболее целесообразно выполнить установку масштабов по осям X и Y автоматически. Для этого на закладке X Axis окна Property Editor поставить флаг на строке X Limit Auto, на закладке Y Axis – флаг на строке Y Limit Auto.
После редактирования диаграммы средствами Property Editor и внесения дополнения в виде номеров точек диаграмма принимает вид, представленный на рис. 11. Характерные точки оцифрованы. Рассмотрим отдельные участки полученной диаграммы.
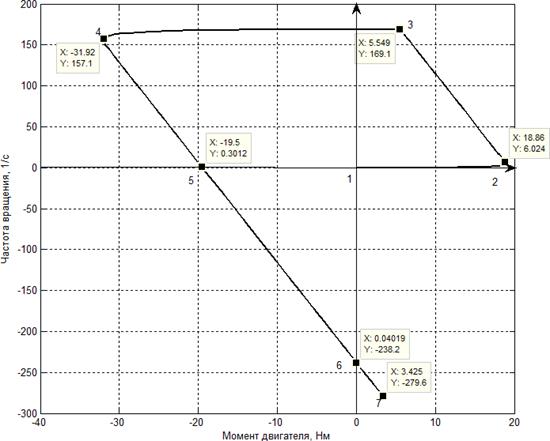
Рис. 11. Отредактированная диаграмма статических характеристик
Участок 1, 2 соответствует процессу нарастания момента до значения 18,86 Н × м, причем и частота вращения изменилась до 6,024 1/с. Участок 2, 3 соответствует статической механической характеристике двигательного режима на условное направление движения «вперёд». Двигатель достиг частоты вращения 169,1 1/с при моменте 5,549 Н × м. Характеристика линейна, наклон определяется суммарным сопротивлением цепи обмотки якоря.
Участок 3, 4 соответствует переходу двигателя на работу в режим противоточного торможения. Двигатель включен «назад», но вращается ещё
«вперёд». Участок механической характеристики 4, 5 заканчивается при нулевой
частоте вращения (точка 5) и является продолжением (участок 5, 6) механической характеристики двигательного режима при работе «назад». Этот участок демонстрирует полный вид механической характеристики: момент короткого замыкания (пусковой) составляет примерно 19,5 Н × м, а частота вращения
идеального холостого хода – 238,2 1/с. Участок 6, 7 является продолжением механической характеристики (5, 6) и представляет собой механическую характеристику режима генераторного торможения. Абсолютное значение частоты вращения в т. 7 (279,6 1/с) больше частоты вращения идеального холостого хода, так как момент нагрузки двигателя активный и раскручивает двигатель до скорости, на которой достигается равенство моментов двигателя и нагрузки. Двигатель работает в режиме генератора и отдаёт энергию, например, для зарядки аккумулятора. Таким образом, на полученной диаграмме отразились почти все возможные режимы работы двигателя (кроме режима динамического торможения).
Рассмотрим моделирование процессов пуска и реверса при начальном нулевом значении тока возбуждения. Отличием в настройках модели является отсутствие флажка в строке Initialize окна настройки блока источника напряжения возбуждения (рис. 7). Время переходного процесса увеличим до 4 секунд, а блок Step задаёт напряжения на обмотке якоря двигателя: +240 В во времени 0...2 с и –240 В от 2 до 4 с.
На рис. 12. показан переходный процесс пуска двигателя при нулевых начальных значениях частоты вращения и тока возбуждения двигателя.
Сравнивая полученные результаты моделирования с результатами, представленными на рис. 10, можно сделать следующие выводы:
• наибольшее влияние при данном способе управления оказано на процесс пуска «вперёд». Время пуска составляет 1,5...1,7 с;
• начальное значение момента равно нулю. Максимальное значение составило 10,84 Н × м (в первом случае – 18,86 Н × м);
• в начальный момент времени, когда момент двигателя мал и не
превышает момента нагрузки, частота вращения начинает расти в отрицательном направлении. Падение частоты вращения прекращается при достижении равенства момента двигателя и момента нагрузки. Далее происходит изменение частоты вращения в положительном направлении и
достигает нулевого значения. И только с момента времени 0,386 с начнется процесс пуска в направлении «вперёд»;
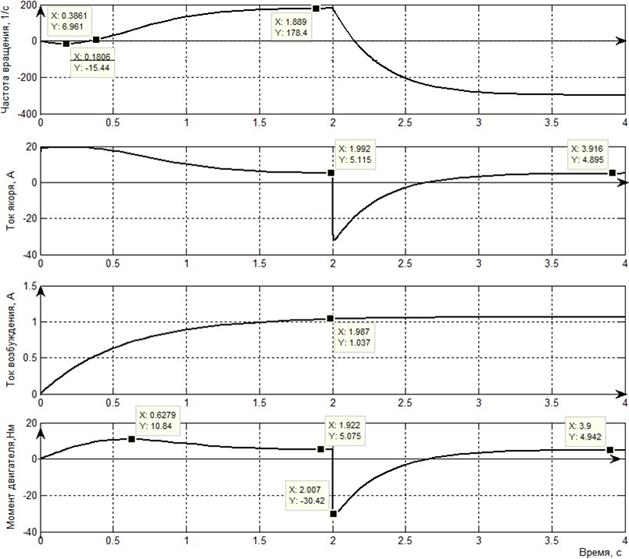 |
Рис. 12. Результаты моделирования процессов пуска и реверса двигателя при нулевых начальных значениях частоты вращения и тока возбуждения
• ток возбуждения установился примерно через 2 с. После этого времени процессы в двигателе протекают одинаково;
• при практической реализации следует исключать одновременную
подачу напряжения на возбуждение и на обмотку якоря.
Механические статические характеристики, снятые в динамическом режиме работы двигателя, показаны на рис. 13.
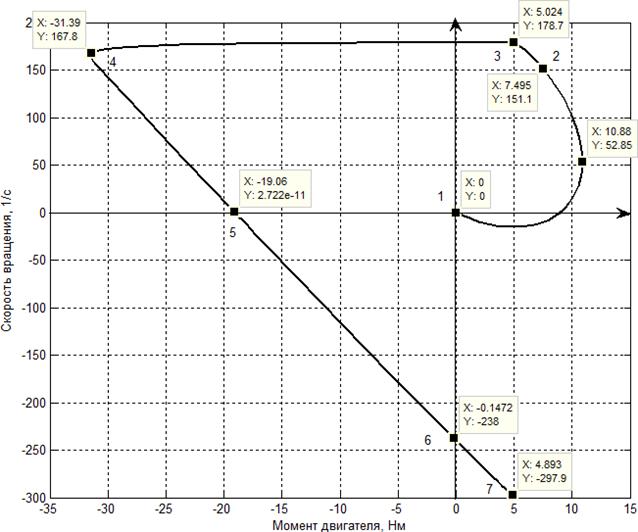
Рис. 13. Механические статические характеристики, снятые в динамическом режиме
Наибольшее влияние произведено на участок 1, 2 характеристики. Он нелинеен. Во время формирования этого участка статической характеристики нарастал ток возбуждения и момент двигателя, что привело к снижению максимального значения момента двигателя. Линейная часть механической характеристики в двигательном режиме показана в виде участка 2, 3. Остальные характеристики почти совпадают с ранее снятыми (рис. 11), так как они получены при достижении током возбуждения примерно установившегося значения.
Дата добавления: 2022-06-11; просмотров: 39; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!