Механические характеристики АД
Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента n = f(M). Эту характеристику (рис. 2.15) можно получить, используя зависимость M = f(S) и пересчитав частоту вращения ротора при разных значениях скольжения.
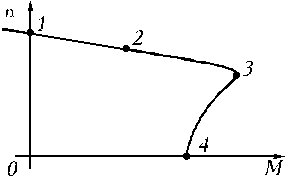
Рис. 2.15
Так как S = (n0 - n) / n0, отсюда n = n0(1 - S). Напомним, что n0 = (60 f) / p – частота вращения магнитного поля.
Участок 1-3 соответствует устойчивой работе, участок 3-4 – неустойчивой работе. Точка 1 соответствует идеальному холостому ходу двигателя, когда n = n0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты Мн и nн. Точка 3 соответствует критическому моменту Мкр и критической частоте вращения nкр. Точка 4 соответствует пусковому моменту двигателя Мпуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1:
n0 = (60 f) / p,
где: р – число пар полюсов машины;
f – частота сети.
Точка 2 с координатами nн и Мн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле:
здесь: Рн – номинальная мощность (мощность на валу).
Точка 3 с координатами Мкр nкр. Критический момент рассчитывается по формуле Мкр = Мн λ. Перегрузочная способность λ задается в паспорте двигателя nкр = n0 (1 - Sкр),  , Sн = (n0 - nн) / n0 – номинальное скольжение.
, Sн = (n0 - nн) / n0 – номинальное скольжение.
Точка 4 имеет координаты n=0 и М=Мпуск. Пусковой момент вычисляют по формуле
|
|
|
Мпуск = Мн λпуск,
где: λпуск – кратность пускового момента задается в паспорте.
Асинхронные двигатели имеют жесткую механическую характеристику, т.к. частота вращения ротора (участок 1–3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей.
6)7)8)
РЕЖИМЫ РАБОТЫ ЭЛЕКТРОПРИВОДА
Все режимы в электроприводе делятся на установившиеся (номинальный режим работы) и переходные (пуск, реверс, торможение).
Установившийся режим работы электропривода определяется из условия равенства нулю динамического момента. Этот режим характеризуется работой двигателя с неизменной угловой скоростью, постоянными во времени и равными по величине моментом двигателя и моментом сопротивления. Так как момент, развиваемый двигателем в установившемся режиме, есть функция скорости, то равенство М=Мс возможно только при условии, что момент сопротивления — постоянная величина или функция скорости. Если МС есть функция, например, пути (угла поворота), то даже при постоянной угловой скорости момент сопротивления изменяется во времени и установившийся режим невозможен.
Установившийся режим описывается статическими характеристиками.
Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
|
|
|
Причинами возникновения переходных режимов в электроприводах является либо изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т. е. пуск, торможение, изменение направления вращения и т. п. Переходные режимы в электроприводах могут возникнуть также в результате аварий или нарушения нормальных условий электроснабжения (например, изменения напряжения или частоты сети, несимметрия напряжения и т. п.).
Характер переходного режима электропривода зависит от свойств рабочей машины, типа примененного двигателя и механической передачи, принципа действия и свойств аппаратуры управления, а также от режима работы двигателя (пуск, торможение, прием и сброс нагрузки и т. д.).
Переходные режимы описываются динамическими характеристиками.
6)7)8)
Тормозные режимы ДПВ
—возврат энергии в сеть — рекуперация;
—торможение противовключением;
—динамическое торможение.
Рассмотрим, как осуществляются эти способы у ДПВ.
Рекуперативное торможение (РТ). Условие РТ — ЭДС двигателя больше приложенного напряжения Е >U. Если ЭДС будет равно приложенному напряжению, то при I = 0, Ф =0, ω =∞ и, следовательно, для режима РТ в естественной схеме включения ДПВ необходима ω >∞,и режим РТ невозможен.
|
|
|
В установках электрического подвижного состава для обеспечения РТ обмотка возбуждения исключается из схемы и подключается к дополнительному источнику. Но это получается ДНВ!
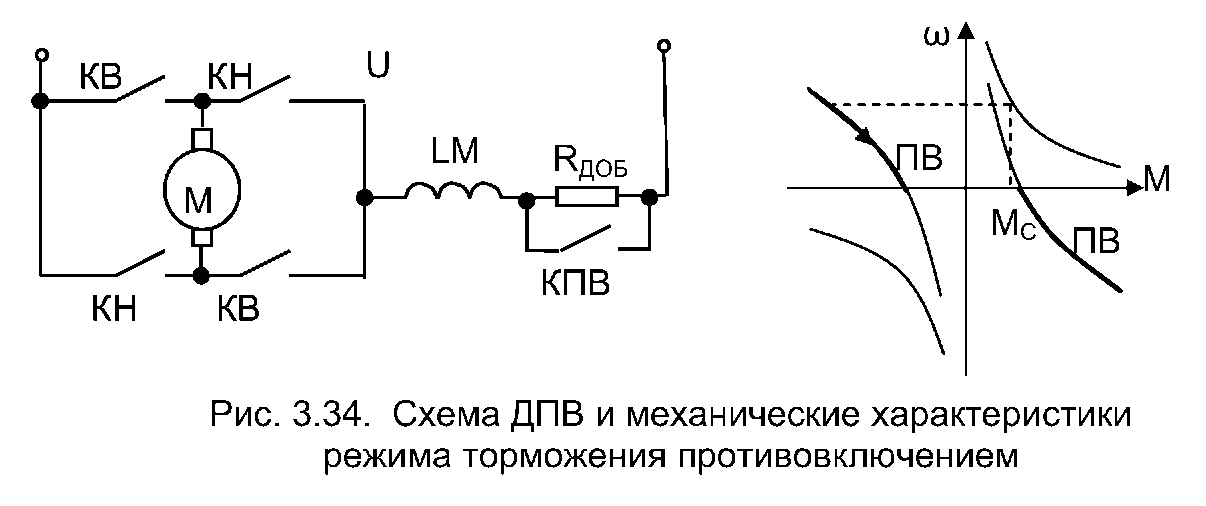
Режим торможения противовключением (ПВ). Особенность состоит в том, как подключить обмотку возбуждения. При изменении полярности напряжения на якоре поток машины не должен менять направления, обмотка должна быть включена в цепь, где направление тока не меняется. В результате ее место — за реверсором (рис. 3.34).При включенииKBи при включении КН полярность напряжения на якоре изменяется, а ток в обмотке возбуждения не изменяет направления, не меняет направления и поток. При работе двигателя в двигательном режиме в одном из направлений переключением контакторовKB и КН изменяется полярность напряжения на якоре, аот-ключение контактора КПВ вводит в цепь якоря добавочное сопротивлениеRдоп. Двигатель переходит в режим противовключения. Характеристики перехода в режим торможения противовключением для торможения на выбеге приведены на рис. 3.34.
|
|
|
Динамическое торможение (ДТ). На практике применяются две схемы динамического торможения:
с независимым возбуждением;
с самовозбуждением.
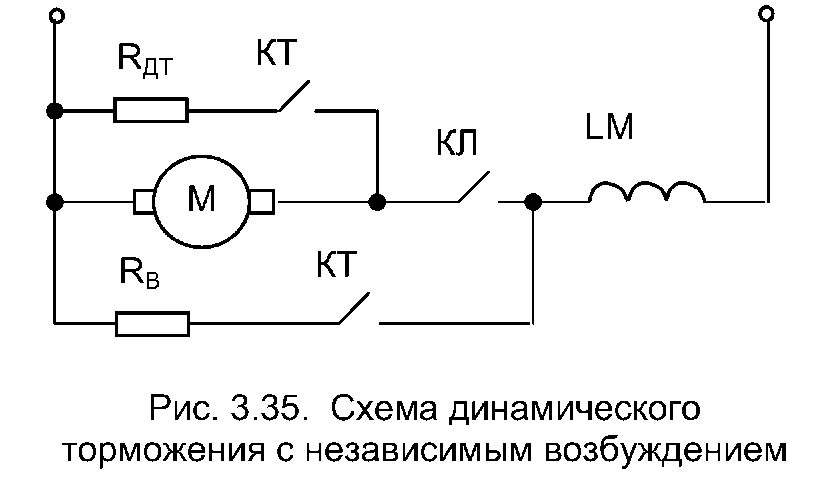 а) Динамическое торможение с независимым возбуждением выполняет-
а) Динамическое торможение с независимым возбуждением выполняет-
ся подключением обмотки возбуждения к отдельному источнику питания. Вча-
стности этим источником может служить сеть, к которой обмотка подключается
через добавочное сопротивление. Такая схема по своим механическим характе-
ристикам повторяет схему динамического торможения двигателя независимого
возбуждения.
На рис. 3.35 приведена схема динамического торможения с независимым возбуждением. В двигательном режиме включен контактор КЛ и якорная цепь подключена к сети. Для перехода в режим динамического торможения отключается контактор КЛ и включается контактор КТ. Обмотка возбуждения контактом КТ через добавочное сопротивлениеRB подключается к сети. Цепь якоря другим контактом КТ замыкается на сопротивлениеRflT. После переключения во вращающемся по инерции якоре наводится ЭДС, возникающий ток совпадает по направлению с ЭДС и во взаимодействии с потоком создается тормозной момент.
—Величина потока зависит от тока в обмотке возбуждения. Для создания потока, близкого к номинальному Ф « Фн, по обмотке возбуждения необходимо пропустить номинальный ток двигателяIH. Расход мощности на возбуждение составляет ~РН (для двигателя независимого возбуждения — 0,02...0,05 Рн). Из этих соображений рассчитывается сопротивлениеRB -UH /IB. СопротивлениеRflT рассчитывается по заданному начальному тормозному моменту.
—Достоинства и недостатки рассмотрены подробно в п. 3.1.6.
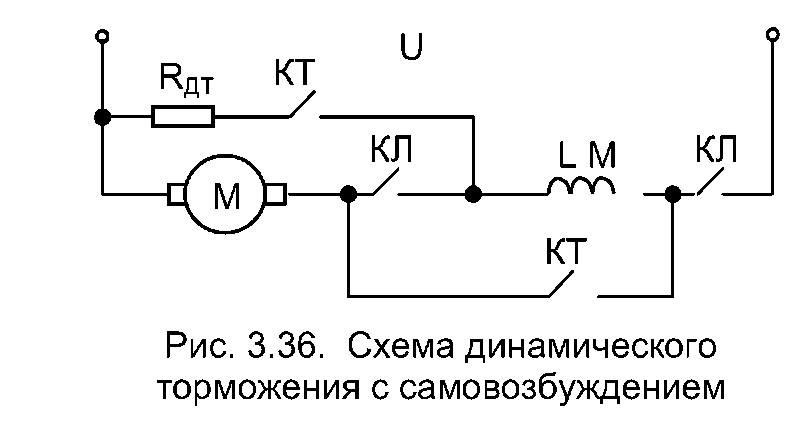
—б) Динамическое торможение с самовозбуждением (рис.3.36) широко ис-
пользуется в крановых механизмах. В двигательном режиме включен контактор
КЛ и якорная цепь подключена к сети. Для перехода в режим динамического
торможения двигатель контактором КЛ отключается от сети.
—Включается контактор КТ и собирается контур динамического торможения. Обмотка возбуждения контактами КТ через добавочное сопротивлениеRflT соединяется последовательно с цепью якоря таким образом, чтобы направление тока в обмотке возбуждения совпало с направлением тока в предыдущем режиме. В этом случае используется остаточное намагничивание двигателя. Двигатель переводится в режим генератора последовательного возбуждения.
9)10)11)
АД может работать во всех трех тормозных режимах:
А) с рекуперацией энергии в сеть;
Б) противовключение;
В) динамическое торможение.
А) Торможение с рекуперацией энергии в сеть.
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а потери в роторе (механические и в стали) будут покрываться внешней силой.
В двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статора Е1 и ротора Е2 совпадают по фазе. При w=w0 ЭДС в роторе не наводится, т. е. равна 0. При w>w0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
ЭДС ротора Е2 меняет свой знак на обратный; машина переходит в генераторный режим с рекуперацией энергии. Что касается тока, то изменяет свое направление только его активная составляющая. Реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора (при S<0 S2>0).

Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно, из выражения для РЭМ следует, что при S<0 PЭМ>0

Т. е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.

Это значит, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания магнитного поля.


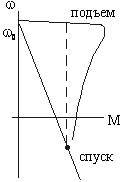
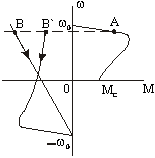
Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью w>w0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью wc, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Режим с рекуперацией имеет место на участке ВС после переключения обмотки статора с числа пар полюсов rП=1 на rП=2 .
Б) Торможение противовключением.
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение S>1, а частота тока в роторе больше частоты питающей сети (  ). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т. е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи (
). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т. е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи (  ), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению

Где Е20 - номинальная ЭДС ротора при S=1
Sн – номинальное скольжение
Sн и – скольжение при номинальной нагрузке на искусственной характеристике.
При спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке.
В) Динамическое торможение с независимым возбуждением постоянным током
При отключении обмотки статора АД от сети, сохраняется лишь незначительный магнитный поток от остаточного намагничивания стали статора. ЭДС наводимая во вращающемся роторе и ток в роторе будут весьма малыми. Взаимодействие тока ротора с потоком от остаточного намагничивания не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора емкостного тока, т. е. опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наведет в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Обычно используется одна из схем, приведенных на рис.
Поскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
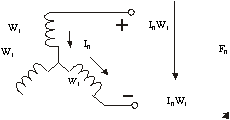

Для вывода уравнения механической характеристики АД в режиме динамического торможения режим синхронного генератора, в который превращается АД после подключения к источнику постоянного тока, целесообразно заменить эквивалентным режимом АД, полагая, что его статор вместо постоянного питается переменным током. При такой замене МДС создается совместно обмотками статора и ротора и должно быть соблюдено равенство МДС для обоих случаев, т. е. FПОСТ=FПЕР. Определение МДС, создаваемой постоянным током IПОСТ для схемы “а”, поясняет рис. и векторная диаграмма, изображенные рядом.

Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора: 
Исходя из условия 
 .
.
Отсюда значение переменного тока, эквивалентного постоянному:  , а
, а 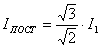 .
.
Необходимые напряжения и мощность постоянного тока : 
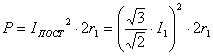 .
.
Определив ток I1, машину в тормозном режиме можно представить как нормальный АД. Однако, работа АМ в режиме динамического торможения существенно отличается от работы в нормальном двигательном режиме. В двигательном режиме намагничивающий ток и магнитный поток при изменении скольжения практически не изменяются. При динамическом торможении магнитный поток при изменении скольжения меняется вследствие непрерывного изменения результирующей МДС, складывающейся из неизменной МДС статора (постоянного тока) и меняющейся МДС ротора (переменного тока переменной частоты).
Результирующий намагничивающий ток, приведенный к числу витков обмотки статора  .
.
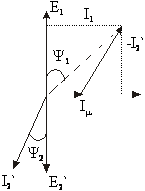
Из векторной диаграммы токов следует:


Возведя в квадрат Эти выражения и почленно складывая, получим:  . Намагничивающий ток равен
. Намагничивающий ток равен  .
.
В приведенной машине  , где E2’ – ЭДС ротора при синхронной скорости w0, соответствующей частоте сети. При w отличной от w0, ЭДС ротора будет равна:
, где E2’ – ЭДС ротора при синхронной скорости w0, соответствующей частоте сети. При w отличной от w0, ЭДС ротора будет равна:  , где n - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:
, где n - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:  , а намагничивающий ток, выраженный через E2’:
, а намагничивающий ток, выраженный через E2’:  .
.
Полное сопротивление ротора с учетом того, что его индуктивное сопротивление изменяется с изменением скорости вращения ротора:  .
.
Учитывая, что  и подставляя значения Im, siny2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен:
и подставляя значения Im, siny2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен:  .
.
Электромагнитный момент, развиваемый двигателем, выраженный через электромагнитную мощность:  , где m1 – число фаз обмотки статора.
, где m1 – число фаз обмотки статора.
Из выражения для М видно, что момент при динамическом торможении определяется переменным током I1, эквивалентным постоянному, протекающему по обмоткам статора.
Взяв производную  и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости:
и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости:  , а значение этого момента, также называемого критическим, равно:
, а значение этого момента, также называемого критическим, равно: 
Механические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
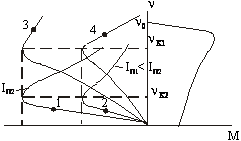
Из выражения для МК следует, что критический момент двигателя в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Разделив значение М на значение МК, уравнению механической характеристики можно придать вид:  .
.
12)13)14)15)
Дата добавления: 2018-02-15; просмотров: 3161; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!