Расчетная модель к теореме Кастильяно.
Внецентренное растяжение (сжатие) жесткого стержня. Определение напряжений и перемещений.
Внецентренным растяжением называется такой вид нагружения бруса, при котором внешние силы действуют вдоль продольной оси бруса, но не совпадают с ней (рис.7.4). Определение напряжений производится с помощью принципа независимости действия сил. Внецентренное растяжение представляет сочетание осевого растяжения и косого (в частных случаях - плоского) изгиба.
 Формула для нормальных напряжений может быть получена как алгебраическая сумма нормальных напряжений, возникающих от каждого нагружения:
Формула для нормальных напряжений может быть получена как алгебраическая сумма нормальных напряжений, возникающих от каждого нагружения:
 ,
,
где  ;
;  ;
;
xP, yP - координаты точки приложения силы P.
Для определения опасных точек сечения необходимо найти положение нейтральной линии (н.л.) как геометрического места точек, в которых напряжения равны нулю.
 .
.
Уравнение нейтральной линии может быть записано как уравнение прямой в отрезках:
 ,
,
где  и
и  - отрезки отсекаемые нейтральной линией на осях координат,
- отрезки отсекаемые нейтральной линией на осях координат,
 ,
,  - главные радиусы инерции сечения.
- главные радиусы инерции сечения.
Нейтральная линия разделяет поперечное сечение на зоны с растягивающими и сжимающими напряжениями. Эпюра нормальных напряжений представлена на рис.7.4.
Если сечение симметрично относительно главных осей, то условие прочности записывается для пластичных материалов, у которых  в виде
в виде
 ,
,
Для хрупких материалов, у которых  условие прочности следует записывать отдельно для опасной точки сечения в растянутой зоне
условие прочности следует записывать отдельно для опасной точки сечения в растянутой зоне
|
|
|
 ,
,
и для опасной точки сечения в сжатой зоне
 ,
,
где xA, yA и xB, yB - координаты наиболее удаленных от нейтральной линии точек сечения в растянутой (A) и сжатой (В) зонах сечения (рис.7.4).
Принцип возможных перемещений. Формула Лагранжа.
Рассмотрим балку (рис. 12.3, а), находящуюся под действием силы Р. Пусть некоторая точка А оси балки совершила конечное действительное перемещение v, которое зависит от значения силы Р, т.е.  Изменим внешнюю силу Р на бесконечно малую величину dР.
Изменим внешнюю силу Р на бесконечно малую величину dР.
А) б)
Рис. 12.3
Тогда действительное перемещение v получит бесконечно малое перемещение dv. Рассмотрим теперь множество перемещений точки А, которые могли бы быть сообщены точке А в соответствии с наложенными на балку внешними связями, но не совершаются фактически вследствие неизменности внешней силы Р. Назовём возможным перемещением любое бесконечно малое воображаемое перемещение, которое может быть сообщено точке А тела в данный момент в соответствии с наложенными на него связями. В отличие от действительного бесконечно малого перемещения dv возможное будем обозначать  , где символ
, где символ  носит название вариации и для него приняты те же правила, что и для дифференциала d. Отметим, что это правило в данном случае не относится к нагрузке P.
носит название вариации и для него приняты те же правила, что и для дифференциала d. Отметим, что это правило в данном случае не относится к нагрузке P.
|
|
|
Пусть теперь мы имеем упругое тело произвольной геометрической формы (рис. 12.3, б). На него действует система обобщённых внешних сил  Тогда точка А приложения одной из сил Pi совершит действительное перемещение, проекцию которого на направление этой силы обозначим
Тогда точка А приложения одной из сил Pi совершит действительное перемещение, проекцию которого на направление этой силы обозначим  . Потенциальная энергия U может быть выражена либо через силы Pi, либо через перемещения :
. Потенциальная энергия U может быть выражена либо через силы Pi, либо через перемещения : 

Сообщим точкам приложения сил Pi возможные перемещения  . Элементарная работа внешних сил
. Элементарная работа внешних сил  Считая, что U представлена через обобщённые перемещения, найдём элементарную работу внутренних сил:
Считая, что U представлена через обобщённые перемещения, найдём элементарную работу внутренних сил:

Приравнивая элементарную работу внешних и внутренних сил, получим условие:
 (2)
(2)
выражающее принцип возможных перемещений Лагранжа.
Их этого принципа вытекает следующий вывод:
Если некоторая механическая система под действием заданных сил находится в равновесии, то работа сил, приложенных к этой системе, на любых бесконечно малых возможных перемещениях равна нулю. Этот принцип является необходимым и достаточным условием равновесия любой механической системы.
Вследствие произвольности вариаций  в (2) находим формулу:
в (2) находим формулу:
|
|
|
 (3)
(3)
выражающую собой теорему Лагранжа: частная производная энергии деформации по перемещению равна силе.
Для линейно упругого тела зависимость между силами и перемещениями является линейной. Наиболее простым выражением для потенциальной энергии является квадратичная формула

 (4)
(4)
где  - постоянные коэффициенты упругой жёсткости тела.
- постоянные коэффициенты упругой жёсткости тела.
На основании (3) и (4) получаем систему уравнений обобщённого закона Гука:

 (5)
(5)
которые связывают силы с перемещениями.
В развёрнутом виде закон (5) имеет вид
где коэффициенты зависят от размеров тела. Поэтому они не являются упругими постоянными материала.
На основании (5) выражение (4) для потенциальной энергии можно записать в виде
 (6)
(6)
Коэффициенты в (5) симметричны. По теореме Лагранжа (3)

Из условия независимости смешанной второй производной от потенциальной энергии  получаем
получаем  .
.
Приведём пример применения теоремы Лагранжа к нелинейной упругой системе.
Потенциальная энергия двух растягиваемых стержней (рис. 12.4):
Рис. 12.4
В силу закона Гука 
Из рис. 12.4 следует перемещение  Так как
Так как  то
то
 Следовательно, потенциальная энергия:
Следовательно, потенциальная энергия:
 может быть выражена через перемещение
может быть выражена через перемещение  . Поскольку условия для использования формулы Лагранжа соблюдены, получаем:
. Поскольку условия для использования формулы Лагранжа соблюдены, получаем:
|
|
|
Теорема Кастильяно (вывод).
Установим теперь метод определения перемещений, основанный на вычислении потенциальной энергии деформации. Поставим задачу нахождения перемещений точек упругой системы по направлению действия приложенных к этой системе внешних сил.
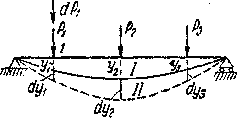
Будем решать эту задачу в несколько приемов; сначала рассмотрим более простой случай (Рис.1), когда на балку в сечениях 1, 2, 3,... действуют только сосредоточенные силы 
 ,
,  )... и т. д. Под действием этих сил балка прогнется по кривой
)... и т. д. Под действием этих сил балка прогнется по кривой  и останется в равновесии.
и останется в равновесии.
Прогибы сечений 1, 2, 3,..., в которых приложены силы  , , ,..., обозначим
, , ,..., обозначим  ,
,  ,
,  ,... и т. д. Найдем один из этих прогибов, например — прогиб сечения, в котором приложена сила .
,... и т. д. Найдем один из этих прогибов, например — прогиб сечения, в котором приложена сила .
Переведем балку, не нарушая равновесия, из положения  в смежное положение
в смежное положение  , показанное на фиг. 328 пунктиром. Это можно сделать различными приемами: добавить новую нагрузку, увеличить уже приложенные и т. д.
, показанное на фиг. 328 пунктиром. Это можно сделать различными приемами: добавить новую нагрузку, увеличить уже приложенные и т. д.
Мы представим себе, что для перехода к смежному деформированному состоянию к силе сделана бесконечно малая добавка  (Рис.1); чтобы при этом переходе не нарушать равновесия, будем считать, что эта добавка прикладывается статически, т. е. возрастает от нуля до окончательного значения медленно и постепенно.
(Рис.1); чтобы при этом переходе не нарушать равновесия, будем считать, что эта добавка прикладывается статически, т. е. возрастает от нуля до окончательного значения медленно и постепенно.
Расчетная модель к теореме Кастильяно.
При переходе от состояния балки к состоянию все нагрузки Р опустятся, значит, их потенциальная энергия уменьшится. Так как равновесие не нарушалось, то уменьшение, энергии нагрузок  целиком преобразовалось в увеличение потенциальной энергии деформаций балки dU. Величина измеряется работой внешних сил при переходе балки из положения в положение II:
целиком преобразовалось в увеличение потенциальной энергии деформаций балки dU. Величина измеряется работой внешних сил при переходе балки из положения в положение II:

Изменение dU потенциальной энергии деформации, являющейся функцией сил , , ,..., произошло за счет очень малого приращения одной из этих независимых переменных , поэтому дифференциал такой сложной функции равен:

Что касается величины  , то эта работа в свою очередь является разностью работы нагрузок Р для положений и :
, то эта работа в свою очередь является разностью работы нагрузок Р для положений и :

Работа  при одновременном и постепенном возрастании сил Р равна:
при одновременном и постепенном возрастании сил Р равна:
При вычислении работы  учтем, что ее величина всецело определяется окончательной формой деформированной балки и не зависит от порядка, в котором производилась нагрузка.
учтем, что ее величина всецело определяется окончательной формой деформированной балки и не зависит от порядка, в котором производилась нагрузка.
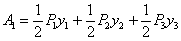
Предположим, что мы сначала нагрузили нашу балку грузом ; балка очень немного прогнется (Рис.2, положение III), и прогибы ее в точках 1, 2, 3 будут 

 . Работа статически приложенной нагрузки будет равна
. Работа статически приложенной нагрузки будет равна  . После этого начнем постепенно нагружать балку одновременно возрастающими грузами , , .
. После этого начнем постепенно нагружать балку одновременно возрастающими грузами , , .
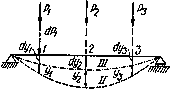
Рис.2. Расчетная модель к теореме Кастильяно.
К первоначальным прогибам добавятся прогибы  (Рис.2). При этой стадии нагружения силы , , произведут работу
(Рис.2). При этой стадии нагружения силы , , произведут работу  , кроме этого, произведет работу уже находившийся на балке груз ; он пройдет путь , и так как при втором этапе нагружения он оставался постоянным, то его работа равна
, кроме этого, произведет работу уже находившийся на балке груз ; он пройдет путь , и так как при втором этапе нагружения он оставался постоянным, то его работа равна  Балка займет положение , показанное на Рис.2 пунктиром.
Балка займет положение , показанное на Рис.2 пунктиром.
Таким образом, полная работа, проделанная внешними нагрузками при переходе балки из недеформированного состояния в положение , будет равна.
Теперь вычислим

Пренебрегая слагаемым второго порядка малости, получаем:

Подставляя полученные значения dU и в исходное уравнение, находим

или

Таким образом, в рассмотренном случае прогиб точки приложения сосредоточенной силы , равен частной производной потенциальной энергии деформации по этой силе.
Полученный результат можно обобщить. Пусть на балку помимо сосредоточенных сил Р действуют в разных сечениях еще пары сил М (Рис.3). Мы можем повторить предыдущие рассуждения, считая, что балка переводится из положения в положение путем добавки  к паре
к паре  . Весь ход рассуждений остается без изменений, надо будет лишь при вычислении работы моментов ,
. Весь ход рассуждений остается без изменений, надо будет лишь при вычислении работы моментов ,  ... умножать их не на прогибы, а на углы поворота
... умножать их не на прогибы, а на углы поворота  ,
,  ,... тех сечений, где эти пары приложены. Тогда dU будет равно
,... тех сечений, где эти пары приложены. Тогда dU будет равно  станет
станет  , и в итоге получим:
, и в итоге получим:


Рис.3. Обобщенная расчетная модель к теореме Кастильяно.
Так как — это перемещение, соответствующее силе , a — перемещение, соответствующее силе то полученные нами результаты можно формулировать так: производная потенциальной энергии деформации по одной из независимых внешних сил равна перемещению, соответствующему этой силе. Это и есть так называемая теорема Кастильяно, опубликованная в 1875 г.
Заметим, что присутствие на балке сплошной нагрузки не меняет предыдущих выводов, так как всякую сплошную нагрузку можно рассматривать как состоящую из большого числа сосредоточенных сил.
Предыдущий вывод был сделан для балки, но совершенно ясно, что его можно повторить для любой конструкции, деформации которой следуют закону Гука.
Для случая изгиба нами была получена формула, связывающая величину потенциальной энергии U с изгибающими моментами:
Изгибающий момент является линейной функцией нагрузок , …, , ,..., q, приложенных к балке:

в этом легко убедиться, просмотрев формулы для вычисления изгибающих моментов при построении эпюр. Следовательно, потенциальная энергия является функцией второй степени от независимых внешних нагрузок.
Вычислим частную производную от U по одной из внешних сил, например . Получаем:
Здесь мы имеем дело с так называемым дифференцированием определенного интеграла по параметру, так как М(х)— функция и и х, интегрирование производится по х, а дифференцирование по параметру . Как известно, если пределы интеграла постоянны, то следует просто дифференцировать подинтегральную функцию.
Таким образом, прогиб в точке приложения сосредоточенной силы равен:
а угол поворота сечения с парой
Напомним, что знак предела l условно показывает, что интеграл должен охватить всю балку.
Дата добавления: 2018-02-15; просмотров: 670; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!