Через 3 мин. повторяются пункты 2-4
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
| Vн | вектор скорости нашего судна |
| Vв , V ц | вектор скорости встречного судна (объекта наблюдения) ,вектор цели |
| Vо | вектор относительной скорости |
| Vн | скорость нашего судна |
| Vв , Vц | скорость встречного судна (объекта наблюдения), скорость цели |
| Vо | относительная скорость |
| ИКн | истинный курс нашего судна |
| ИК ц (ИКв) | истинный курс встречного судна (объекта наблюдения, ЦЕЛИ)) |
| ИП | истинный пеленг встречного судна (объекта наблюдения) |
| КУ | курсовой угол встречного судна (объекта наблюдения) |
| Д | дистанция до встречного судна (объекта наблюдения) |
| ЛОД | линия относительного движения |
| ОЛОД | ожидаемая линия относительного движения (ОЛОД) |
| У | точка упреждения |
| Дкр | дистанция кратчайшего сближения судов |
| Тi | судовое время наблюдений |
| Ткр | судовое время прихода судов в точку кратчайшего сближения |
| Ту | судовое время точки упреждения |
| Трасх | судовое время, когда после выполнения маневра расхождения наше судно может вернуться к первоначальным элементам движения |
| tу | интервал времени от момента взятия последней точки для построения скоростного треугольника до момента точки упреждения |
| tкр | интервал времени от момента взятия последней точки для построения скоростного треугольника (либо от точки упреждения, если предполагается совершить маневр) до момента прихода судов в точку кратчайшего сближения |
| tрасх | интервал времени от момента точки упреждения до момента, когда после выполнения маневра расхождения наше судно может вернуться к первоначальным элементам движения |
Относительная прокладка
|
|
|
Эта прокладка получила широкое распространение, так как этим способом быстро и легко решаются главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую наблюдает судоводитель на экране индикатора относительного движения.
При относительной прокладке также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме — точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную до пересечения с ЛОД). Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке пересечения.
|
|
|
Выбор и обоснование маневра для расхождения в заданной дистанции
Если D кр < Dзад то необходимо предпринять маневр для расхождения с судном-целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию и выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя t кр , VO и Dзад, выбирает время начала маневра. Последующая графическая прокладка служит для проверки безопасности выбранного маневра и уточнения его величины.
Пошаговые действия для оценки ситуации: 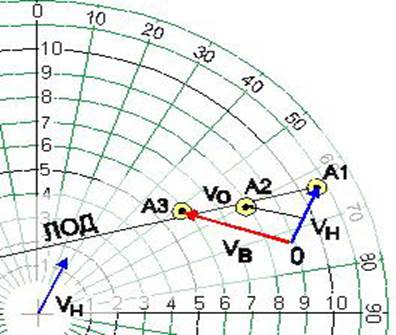
Наносится вектор скорости нашего судна
Делаются замеры пеленга и дистанции встречного судна
В таблицу записываются соответствующие данные
4. на планшете ставится точка, соответствующая положению встречного судна
5. в полученную точку параллельно переносится и "втыкается" вектор скорости нашего судна
через 3 мин. повторяются пункты 2-4
Дата добавления: 2021-04-05; просмотров: 71; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!