Б. Системы автоматического регулирования – системы стабилизации, системы программного управления и следящие системы
КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Для ознакомления с основными видами систем автоматического управления и соответствующей терминологией рассмотрим классификацию САУ по ряду признаков , существенных с точки зрения теории автоматического управления.
А. Разомкнутые, замкнутые и комбинированные системы
В схеме САУ, изображенной на рис.2 на управляющее устройство поступают три вида информации: информация о величине X, определяющей состояние объекта, информация о величине Х 3, задающей цель управления, информация от F – возмущениях, нарушающих режим работы объекта. Однако возможны САУ, в которых используется лишь часть перечисленной информации. При этом в зависимости от видов используемой управляющим устройством информации различают два основных типа САУ–разомкнутыесистемы и замкнутые системы.
6
В р а з о м к н у т ы х САУ выходная величина объекта X не измеряется, т. е. нет контроля за состоянием объекта. Разомкнутыми такие системы называются потому, что вследствие этого в них отсутствует обратная связь между выходом объекта и входом управляющего устройства, при наличии которой объект и управляющее устройство образуют замкнутый контур.
Возможны разомкнутые САУ, в которых управляющее устройство измеряет только одно задающее воздействие Х 3, одно возмущение F и, наконец, оба эти сигнала одновременно.
|
|
|
В первом варианте разомкнутой САУ управление осуществляется по
з а д а ю щ е м у в о з д е й с т в и ю : поступающие извне команды Х 3 приводят путем изменения управляющего воздействия U к соответствующему изменению выходной величины объекта X. Точность обеспечиваемого при этом соответствия между X и Х 3 целиком определяется постоянством параметров системы и возмущений и никак не контролируется. Поэтому практически такие системы пригодны лишь при достаточно высокой стабильности указанных выше условий работы системы и невысоких требованиях к точности.
Примером системы этого типа служит разомкнутая система программного управления напряжением синхронного генератора, изображенная на рис. 3(а):
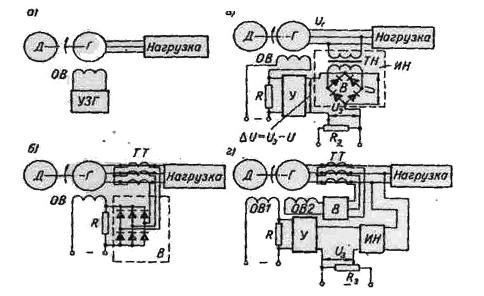
Рисунок 3. Системы управления напряжением синхронного генератора: а – разомкнутая система программного управления; б – разомкнутая система компенсации влияния нагрузки; в – замкнутая система управления по отклонению; г – комбинированная система управления отклонению с компенсацией влияния нагрузки.
7
Объектом управления здесь является синхронный генератор Г, вращаемый с постоянной скоростью двигателем Д: Выходная величина объекта – напряжение генератора – определяется напряжением возбуждения, подаваемым на обмотку возбуждения генератора ОВ от устройства задания графика напряжения УЗГ. Последнее является управляющим устройством. Напряжение возбуждения автоматически изменяется во времени в соответствии с заложенной в УЗГ программой, обеспечивая
|
|
|
| соответствующее изменение напряжения генератора. | ||||||
| С и с т е м а | у п р а в л е н и я | п о | з а д а ю щ е м у | и | ||
| в о з м у щ а ю щ е м у | в о з д е й с т в и я м | является наиболее полным | ||||
видом разомкнутой САУ. В этом случае управление объектом осуществляется в функции двух величии Х3 и F, т. е. здесь объединены оба предыдущих варианта разомкнутых систем.
Примером такой системы может быть система программного управления напряжнейшем генератора, объединяющая схемы изображенные на рис. 3 а и б. (В этом случае в схеме рис. 3( б) напряжение питания цепи возбуждения должно подаваться от устройства задания графика напряжения УЗГ, показанного на рис. 3(а). В отличии от системы программного управления, изображенной на рис. 3(а) в новой схеме устраняется основная ошибка по напряжению, вызванная непостоянством нагрузки генератора.
|
|
|
В з а м к н у т ы х САУ на вход управляющего устройства подаются задающее воздействие Х3 и выходная величина объекта X. Исходя из величины Х3, управляющее устройство определяет соответствующее требуемое значение X и, имея информацию о текущем значении X, обеспечивает необходимое соответствие между X и Х3 путем воздействия на объект.
В такой САУ управляющее устройство стремится ликвидировать все отклонения X от его значения, определяемого заданием Х 3, независимо от причин, вызвавших эти отклонения, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров системы.
| Как видно | из рис.2, САУ такого | типа | представляют собой | ||
| з а м к н у т ы й | к о н т у р, образованный | объектом и | управляющим | ||
| устройством. При | этом | управляющее устройство | создает | о б р а т н у ю | |
с в я з ь вокруг объекта, связывая его выход со входом. Замкнутые САУ
называются поэтому еще с и с т е м а м и с о б р а т н о й с в я з ь ю и л ис и с т е м а м и у п р а в л е н и я п о о т к л о н е н и ю .
Эти системы могут обеспечить принципиально неограниченную точность управления и представляют собой основной тип САУ.
К о м б и н и р о в а н н ы е САУ представляют собой объединение в одну систему замкнутой системы управления по отклонению и разомкнутой системы управления по внешнему воздействию. Показанная на рис. 2 схема является схемой такой комбинированной САУ.
|
|
|
Добавление к замкнутой системе управления разомкнутой системы компенсации влияния на выходную величину объекта какого-либо возмущения облегчает задачу замкнутой САУ и тем самым позволяет
8
упростить ее и повысить точность управления. Лучшее качество управления
в комбинированных системах объясняется тем, что в них наиболее полно используется информация об объекте и внешней ситуации.
Б. Системы автоматического регулирования – системы стабилизации, системы программного управления и следящие системы
Частным, но широко распространенным видом систем автоматического
| управления | являются | с и с т е м ы | а в т о м а т и ч е с к о г о | ||
| р е г у л и р о в а н и я (САР). | Системой автоматического регулирования | ||||
называется САУ, задача которой заключается в поддержании выходной величины объекта X на заданном уровне Х З, т. е. поддержание равенства
X = Х 3.
В зависимости от характера задающего воздействия САР делятся на три вида: системы стабилизации,системы программного управления иследящие системы.
В системах стабилизации задающее воздействие постоянно, в системах программного управления оно изменяется по заранее заданному закону, в следящих системах оно тоже изменяется, но закон изменения заранее не известен. В последнем случае задающее воздействие поступает на систему извне и задачей системы является обеспечение слежения выходной величиной объекта за изменяющейся задающей величиной так, чтобы все время поддерживалось равенство X = Х 3.
Управляющее устройство в системах автоматического регулирования называется р е г у л я т о р о м , а выходная величина – р е г у л и р у е м о й
в е л и ч и н о й.
Примерами систем автоматического регулирования служат системы, показанные на рис. 3, (б, в, г). Объектом регулирования здесь является синхронный генератор, регулируемой величиной – его напряжение, а
| обведенные пунктиром управляющие устройства – регуляторами. | • | |||
| В. Одномерные и многомерные системы | ||||
| В зависимости от количества выходных координат объекта управления, | ||||
| образующих вектор | выходной величины X, САУ | делятся на | ||
| о д н о м е р н ы е и м н о г о м е р н ы е (двухмерные и т. д.). | ||||
| Рассмотренные | выше системы | автоматического | регулирования | |
напряжения синхронного генератора (см. рис. 3) являются одномерными системами. Если наряду с напряжением регулировать частоту этого генератора путем воздействия на скорость вращающего его двигателя, получится двухмерная система автоматического регулирования.
Многомерные САУ (и САР), в свою очередь, делятся на системы связанного и несвязанного управления (регулирования).
С и с т е м а н е с в я з а н н о г о у п р а в л е н и я - имеет несколько управляющих устройств, каждое из которых осуществляет управление своей выходной координатой объекта. При этом все эти устройства не имеют взаимных связей. (Последнее, однако, не исключает возможности влияния управляющих устройств друг на друга через объект управления или,
9
например, общий источник питания.)
В с и с т е м е с в я з а н н о г о у п р а в л е н и я отдельные управляющие устройства связаны друг с другом внешними связями.
Входящая в состав многомерной системы управления (как связанной, так и несвязанной) отдельная система управления называется
а в т о н о м н о й , если управляемая ею выходная координата объекта не зависит от' значений остальных его координат, так что изменение последних не вызывает изменения этой координаты.
Дата добавления: 2021-04-06; просмотров: 157; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!