Алгоритм расчета переходных процессов
В объемном гидроприводе с разветвленной сетью трубопроводов
Рассмотрим часть гидросистемы, состоящую только из «проточных» элементов, определяемых уравнениями только типа 1, и нескольких тупиковых узлов, давление в которых определяется уравнениями типа 2 и 4. Из рассмотренных агрегатов проточными элементами являются гидравлические линии и гидроцилиндры без учета сжимаемости жидкости. Сначала для простоты ограничимся схемой гидросистемы, приведенной на рис. 2. Стрелками показаны принятые за положительные направления расходов по элементам. Элементы 1, 2, 4, 5, 6 и 7 - гидравлические линии; элемент 3 - гидроцилиндр. Узлы 1, 2, 5, 7 и 8 в данной схеме тупиковые.
Приведенный упрощенный пример рассматривается лишь для иллюстрации метода объединения уравнений элементов в единую систему уравнений.

Запишем уравнения неразрывности потока рабочей жидкости для узлов 3, 4 и 6:
узел 3 Q1 + Q2 + Q33 = 0;
узел 4 Q34 - Q4 - Q5 = 0; (7.14)
узел 6 Q5 - Q7 - Q6 = 0.
Поскольку элементом 3 является гидроцилиндр, который в общем случае имеет разные рабочие площади в полостях, то расход Q33, вытекающий из узла 3, не равен расходу Q34, втекающему в узел 4 (Q33¹Q34); дифференцируемой переменной в уравнении гидроцилиндра является скорость поршня. Выразим расходы Q33, Q34 по полостям гидроцилиндра через скорость поршня и соответствующие площади поршня:
|
|
|
 (7.15)
(7.15)
Подставив полученные выражения расходов в уравнения неразрывности и продифференцировав их, получим:
 (7.16)
(7.16)
Таким образом, коэффициентом в уравнении неразрывности при переменной скорости штока гидроцилиндра является рабочая площадь поршня, соответствующая полости, подключенной к этому узлу.
Подставим в (7.16) значения производных, используя уравнения (7.6) и (7.7) и введя сокращенные обозначения коэффициентов:
 (7.17)
(7.17)
Запишем систему уравнений (7.17), оставив слева неизвестные давления р3, p4, p6, в проточных узлах:
 (7.18)
(7.18)
Полученная система уравнений линейна относительно явлений в проточных узлах гидросистемы. Вычислив или задав давления в тупиковых узлах, т. е. р1, р2, р5, р7 и р8, можно определить давления р3, р4 и р6, решив полученную систему из трех уравнений. При этом потери давления Dр линиях и величина активной нагрузки на исполнительном штоке гидроцилиндра F(x) должны быть вычислены по начальным значениям расходов по соответствующим линиям Q1, Q2, Q3, Q4, Q5, Q6, Q7 и начальному положению штока х.
|
|
|
Полученные значения давлений р3, р4, и р6, могут быть использованы для вычислении правых частей дифференциальных уравнений элементов схемы (рис. 2). Таким образом, в результате интегрирования системы дифференциальных уравнений будут определены значения расходов по всем гидравлическим линиям и скорость исполнительного штока гидроцилиндра.
Ход исполнительного штока вычисляется интегрированием уравнения
 (7.19)
(7.19)
Приведенный алгоритм расчета участка структурной схемы гидросистемы можно обобщить и распространить на схему, состоящую из любого числа элементов и узлов. При этом следует иметь в виду, что давления в тупиковых узлах должны быть предварительно вычислены интегрированием дифференциальных уравнений 2-го или 4-го типа.
Рассмотрим структурную схему гидросистемы, состоящую из е проточных элементов, расположенных между и нетупиковыми узлами. Появится некоторое число ul тупиковых узлов, к которым будут подключены агрегаты, определяемые уравнениями 2-го и 4-го типов (гидроаккумулятора, насоса, бака).
Систему дифференциальных уравнении движения жидкости по «проточным» элементам (7.11) для такой структурной схемы удобно записать в векторной форме:
|
|
|
 (7.20)
(7.20)
где {Y}, {Р} - векторы неизвестных параметров потока рабочей жидкости, полностью определяющие работу гидросистемы. {Y} - вектор-столбец, имеющий е компонент расходов по трубопроводам и скоростей поршней по гндроцилиндрам. {Р} - вектор, имеющий и компонент давлений в нетупиковых узлах; [К] - матрица коэффициентов дифференциальных уравнений проточных элементов размерности (е ´ u)\ {N}- вектор-столбец, имеющий е компонент, зависящий от давлений в тупиковых узлах системы, гидравлических потерь давлении в линиях и нагрузок на гидроцилиндрах.
В правильности записи уравнения (7.20) легко убедиться, произведя дифференцирование каждого компонента вектора {Y} и умножение матрицы [К] на вектор {P} - вектор давлений в проточных узлах.
Для вычисления правых частей уравнения необходимо определить вектор давлений {Р}. Для этого аналогично тому, как это было сделано выше, воспользуемся системой уравнений неразрывности потока в нетупиковых узлах гидросистемы, которая в векторной форме имеет вид:
[l]´{Y} = 0, (7.21)
|
|
|
где [l] - постоянная матрица коэффициентов размерностью (u ´ e). (Правило заполнения матриц коэффициентов [К], [l] и вектор-столбца {N} будет дано ниже.)
Продифференцировав уравнение (7.21), получим
[l]´d[Y]/dt=0. (7.22)
Исключим из (7.22) производную вектора [Y], подставив ее значение из уравнения (7.20). Получим систему линейных уравнений относительно вектора {Р}:
[[l]´[K]]´{P}-[l]´{N}=0.
Следует иметь и виду, что матрица [[l]´[K]] квадратная и имеет размерность (u ´ u). Тогда
{P}=[M]´{N}, (7.23)
где [M]=[[l]´[K]]-1 ´[l] - матрица, постоянная для заданной структурной схемы гидросистемы размерностью (u ´ е). Подставив в уравнение (7.20) значение вектора {Р}, получим
 , (7.24)
, (7.24)
где [S] =[K]´[[l]´[К]]-1´[l] - [E] - матрица, постоянная для заданной структурной схемы гидросистемы, размерностью (е ´ е). Таким образом, для определения расходов и скоростей поршней гидроцилиндров необходимо проинтегрировать уравнение (7.24).
Матрицы [М] и [S] зависят от структурной схемы гидросистемы, геометрических размеров ее элементов и приведенных масс гидродвигателей. Эти матрицы не зависят от параметров потока и активных нагрузок на гидродвигателях.
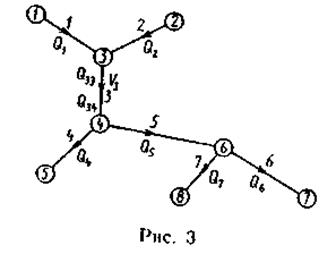
Перейдем к определению правила формировании матриц [l], [К] и вектора {N}. При этом удобно представить структурную схему гидросистемы в виде ориентированного графа (рис. 3). Ориентация дуг соответствует выбранному положительному направлению расхода — скорости по соответствующим элементам гидросистемы.
[l] - матрица коэффициентов в векторном уравнении неразрывности потока. Строки матрицы соответствуют вершинам графа, расположенным между проточными элементами, столбцы - проточным элементам. Размерность матрицы (и ´ е). Следует отметить, что эта матрица полностью определяет взаимосвязь элементов схемы гидропривода.
Рассматриваем поочередно вершины графа и связанные с ними дуги. Возможны два случая:
1) все дуги, сходящиеся в вершине, соответствуют гидравлическим линиям. В этом случае если дуга направлена к рассматриваемой вершине, то на пересечении строки, соответствующей вершине, и столбца, соответствующего дуге, записывается + 1. Если дуга направлена от вершины, то на пересечении строки и столбца записывается - 1;
2) в вершине сходятся дуги, соответствующие гидравлическим линиям и гидроцилиндрам. Как было отмечено, в уравнении неразрывности расход по полостям в этом случае должен быть выражен через пропорциональную величину - скорость исполнительного штока. Рабочая площадь поршня полости, обращенная к рассматриваемому узлу, является коэффициентом пропорциональности.
Поэтому если дуга, связанная с узлом, соответствует гидроцилиндру, то на пересечении строки и столбца записывается рабочая площадь поршня. Знак « + » или « - » определяется направлением скорости исполнительного штока, обозначенным стрелкой на дуге графа. Если дуга не связана с рассматриваемой вершиной, то соответствующий элемент матрицы равен нулю.
[К] - матрица коэффициентов в векторном уравнении проточных элементов. Строки матрицы соответствуют дугам графа, т.е. проточным элементам, а столбцы - вершинам графа, расположенным между этими элементами. Размерность матрицы (е ´ u).
Если проанализировать структуру матриц [К] и [l], то легко убедиться, что [К] представляет собой транспонированную матрицу [l], строки которой, соответствующие элементам гидросистемы, умножены на соответствующие инерционные коэффициенты ki этих элементов со знаком « - ».
{N} - вектор-столбец, размерность которого равна количеству проточных элементов е. Заполнение элементов вектора производится в зависимости от типа элемента, соответствующего заполняемой строке.
Для определения вектора {N} необходимо предварительно вычислить давление в тупиковых узлах, воспользовавшись уравнениями элементов, подключенных к ним.
Элемент l - гидравлическая линия, находящаяся между двумя нетупиковыми узлами:
Элемент l - гидравлическая линия, находящаяся между двумя узлами - тупиковым и нетупиковым:
где pj — давление в тупиковом узле, знак зависит от направления расхода в гидравлической линии (направление к тупиковому узлу - « + », от узла - « - »); j - элемент, примыкающий к тупиковому узлу. Элемент l - гидроцилиндр:
где ml — масса, приведенная к штоку цилиндра.
Руководствуясь изложенными правилами формирования матриц и векторов, запишем (7.20) и (7.21) в развернутом виде для рассматриваемого примера (рис. 3) (подробно см. на примере задачи 7.21):
 (7.25)
(7.25)
 (7.26)
(7.26)
Таким образом, полная система уравнений, определяющая функционирование гидросистем объемного привода, состоит из: обыкновенных уравнений, определяющих давления в тупиковых узлах (насоса, давления бака); дифференциальных уравнений, определяющих ход исполнительного штока гидроцилиндра, давление в гидроаккумуляторе; дифференциальных уравнении «проточных» элементов.
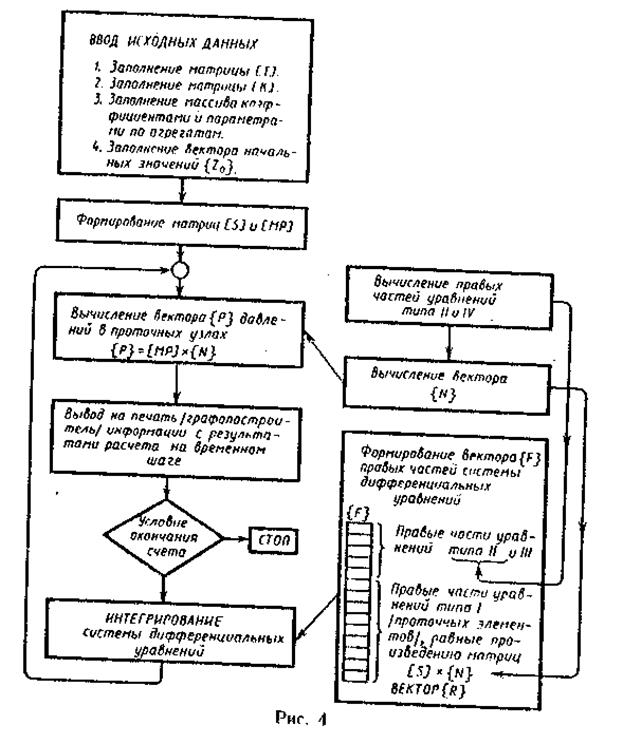
Интегрирование системы дифференциальных уравнений рекомендуется проводить методом Рунге - Кутта четвертого порядка или методом Кутта - Мерсона. Для реализации указанного метода необходимо четырехкратное вычисление вектора {F} правых частей системы дифференциальных уравнений на каждом временном шаге. Результат интегрирования - вектор {Z} переменных, определяемых системой дифференциальных уравнений.
Размерность векторов {F} и {Z} равна суммарному количеству дифференциальных уравнений.
Для полного анализа результатов расчета необходимо вычислить давление в проточных узлах. Давления в этих узлах определяются вектором {P} и могут быть вычислены с помощью выражения (7.23).
Реализация на ЭВМ рассмотренного алгоритма расчета параметров гидросистемы объемного привода может быть выполнена согласно блок-схеме (рис. 4).
Дата добавления: 2021-06-02; просмотров: 91; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!