СИЛОВОЙ РАСЧЕТ ГРУППЫ АССУРА ВТОРОГО КЛАССА С ТРЕМЯ ВРАЩАТЕЛЬНЫМИ КИНЕМАТИЧЕСКИМИ ПАРАМИ
Силовой расчёт структурных групп методом Н.Г. Бруевича
Учебно – методическое пособие
к практическим занятиям по дисциплинам «Теоретическая и прикладная механика» и «Теория механизмов и машин»
для студентов специальностей обучающихся по направлениям - 131000 «Нефтегазовое дело» по профилю «Эксплуатация и обслуживание объектов добычи нефти» и 151000 «Технологические машины и оборудование» по профилю «Машины и оборудование нефтяных и газовых промыслов».
Уфа 2017
Учебно-методическое пособие предназначено к практическим занятиям по дисциплинам «Теоретическая и прикладная механика» и «Теория механизмов и машин». Рекомендуется для студентов обучающихся по направлениям -131000 «Нефтегазовое дело» по профилю «Эксплуатация и обслуживание объектов добычи нефти» и 151000 «Технологические машины и оборудование» по профилю «Машины и оборудование нефтяных и газовых промыслов».
Составитель Абдюкова Р.Я., доц., канд. техн. наук
Рецензент Арсланов И.Г.,проф., докт. техн. наук,
© Уфимский государственный нефтяной технический университет, 2017
Оглавление
Введение
1. Силовой анализ механизмов
2. . Силовой расчет группы Ассура второго класса с двумя вращательными и одной поступательной кинематическими парами
|
|
|
3. Силовой расчет группы Ассура второго класса с тремя вращательными кинематическими парами
4. Силовой расчет группы Ассура второго класса с двумя вращательными и внутренней поступательной кинематическими парами.
5. Силовой расчет группы Ассура второго класса с двумя поступательными и внешней вращательной кинематическими парами.
6. Силовой расчет начального механизма.
Введение
Основной целю изучения темы «Силовой расчет» является освоение студентами общих методов исследования и проектирования механизмов и общих вопросов механики машины. Изучение данной темы формирует у студентов необходимую начальную базу знаний по общим методам анализа и синтеза механических систем, положенных в основу технологического оборудования, применяемого в сфере будущей профессиональной деятельности выпускника (буровое оборудование и оборудование нефтегазодобычи) и обеспечивает фундаментальную подготовку студента в области анализа работы механического оборудования.
При выполнении практического задания по данной теме у студентов:
- должны вырабатываться навыки по оценке надежности элементов конструкции;
-формируется общее представление о конструкциях и назначениях типовых деталей, часто встречающихся в технологических машинах и оборудовании, в частности, нефтегазодобывающей промышленности;
|
|
|
-развивается инженерное мышление с точки зрения изучения современных методов, правил, норм расчета и конструирования (проектирования) деталей и сборочных единиц машин общего назначения.
В результате изучения лабораторной работы «Структурный анализ плоских механизмов»
Содержание предлагаемого учебно-методического пособия способствует реализации требований ФГОС-3+ и формированию профессиональных компетенций у студентов, таких как:
ПК-1 - способностью к систематическому изучению научно-технической информации, отечественного и зарубежного опыта по соответствующему профилю подготовки;
ПК-5 - способность принимать участие в работах по расчету и проектированию деталей и узлов машиностроительных конструкций в соответствии с техническими заданиями и использованием стандартных средств автоматизации проектирования;
ПК-6 - способность анализировать полученный результат и умение сделать вывод о состоянии объекта расчета. Способность разрабатывать рабочую проектную и техническую документацию, оформлять законченные проектно-конструкторские работы с проверкой соответствия разрабатываемых проектов и технической документации стандартам, техническим условиям и другим нормативным документам.
|
|
|
СИЛОВОЙ АНАЛИЗ МЕХАНИЗМОВ
В курсовом проекте после проведения структурного и кинематического анализа плоского рычажно-шарнирного механизма требуется провести силовой анализ этого механизма, который предполагает решение первой задачи динамики - по заданному закону движения определить действующие силы. Так как законы движения начальных звеньев и внешние силы, действующие на звенья механизмов, заданы, то силовой расчет сводится в основном к определению сил в кинематических парах.
Результаты силового анализа необходимы для дальнейших расчетов деталей на прочность, жесткость, износостойкость, надежность, для выбора типов и размеров подшипников, определения коэффициента полезного действия механизма.
Силовой расчет можно проводить с учетом и без учета сил трения в кинематических парах. В курсовом проекте силовой расчет проводится без учета сил трения.
Обычно при расчетах деталей механизмов на прочность необходимо знать изменение величины сил в кинематических парах за цикл. При выполнении курсового проекта можно ограничиться расчетом сил для одного или двух положений механизма, в которых действуют максимальные внешние нагрузки. К внешним нагрузкам относятся: силы тяжести звеньев (Gi), движущая сила (Fid), момент сопротивления (Mic).
|
|
|
Силовой расчет, учитывающий ускоренное движение масс, можно производить методом, основанным на законе Ньютона, или же с применением принципа Даламбера. При решении задачи последним методом к каждому звену, помимо внешних сил и моментов, прикладываются главный вектор сил инерции  и главный момент сил инерции
и главный момент сил инерции  . В результате вся система сил и моментов условно рассматривается в равновесии, а значит задачу динамики можно решать методами статики.
. В результате вся система сил и моментов условно рассматривается в равновесии, а значит задачу динамики можно решать методами статики.
Главный вектор сил инерции звена и главный момент сил инерции определяются по формулам:

 ,
,
где mi - масса i-го звена;
 - ускорение центра масс i-го звена;
- ускорение центра масс i-го звена;
 - угловое ускорение i-го звена;
- угловое ускорение i-го звена;
Jsi - момент инерции i-го звена относительно главной центральной оси, проходящей через центр масс Si.
Главный вектор сил инерции прикладывается в центре масс звена S i и направляется противоположно  .
.
Числовые значения масс и моментов инерции звеньев механизма приведены в задании на курсовое проектирование. Для определения векторов сил инерции и главных моментов сил инерции для всех звеньев механизма необходимо определить угловые ускорения звеньев и линейные ускорения центров масс. Эти величины находятся при кинематическом анализе механизма с использованием графического, аналитического или численного методов исследования.
Силы взаимодействия звеньев рекомендуется обозначать буквой Fij с двойным индексом. Первая цифра индекса показывает звено, к которому приложена сила; вторая цифра звено, со стороны которого действует сила, например F12 – сила, с которой звено 2 действует на звено 1.
Для проведения силового расчета нужно расчленить заданный плоский рычажный механизм на группу начального звена (начальное звено со стойкой) и структурные группы с нулевой степенью свободы, так называемые группы Ассура – статически определимые группы, для которых число неизвестных сил равно числу уравнений.
Кинетостатический расчет механизма начинаем с группы Ассура, наиболее удаленной от начального звена, и проводим его в такой последовательности, как и разделение на группы Ассура при структурном анализе механизма.
Рассмотрим наиболее часто встречающиеся группы, из которых состоят рычажные механизмы, исследуемые при курсовом проектировании.
2. СИЛОВОЙ РАСЧЕТ ГРУППЫ АССУРА ВТОРОГО КЛАССА С ДВУМЯ ВРАЩАТЕЛЬНЫМИ И ОДНОЙ ПОСТУПАТЕЛЬНОЙ КИНЕМАТИЧЕСКИМИ ПАРАМИ
Такая группа принадлежит кривошипно-шатунному механизму и состоит из шатуна 2, соединенного с ползуном 3 (рис. 1).

Рисунок 1- Схема сил группы Ассура 2–3 (ВВП), Kl=…, м/мм
Расчет начинаем с определения сил тяжести звеньев G2 и G3, которые приложены в их центрах тяжести S2 и S3, направлены вертикально вниз и определяются как произведение массы звена mi на ускорение свободного падения g ≈ 9,81:
 .
.
Так как группа освобождена от связей, то вместо них прикладываем соответствующие реакции: реакцию  , действующую в поступательной паре со стороны неподвижного звена 4 на звено 3, и реакцию
, действующую в поступательной паре со стороны неподвижного звена 4 на звено 3, и реакцию  , действующую в шарнире А со стороны звена 1 на звено 2.
, действующую в шарнире А со стороны звена 1 на звено 2.
Реакция известна по величине, но известна по направлению: она перпендикулярна направляющей 4.
Реакция не известна ни по величине, ни по направлению. Раскладываем ее на две составляющие: тангенциальную  , направленную перпендикулярно звену АВ, и нормальную
, направленную перпендикулярно звену АВ, и нормальную  , направленную вдоль звена АВ.
, направленную вдоль звена АВ.
Сила производственного сопротивления  действует на ползун 3, проходит через его центр тяжести S3 совпадающий с точкой В, направлена против движения ползуна (направление движения определяется по направлению скорости точки В из плана скоростей для данного положения механизма). Величина силы либо задана, либо определяется по индикаторной диаграмме.
действует на ползун 3, проходит через его центр тяжести S3 совпадающий с точкой В, направлена против движения ползуна (направление движения определяется по направлению скорости точки В из плана скоростей для данного положения механизма). Величина силы либо задана, либо определяется по индикаторной диаграмме.
Для того, чтобы рассматривать группу как находящуюся в равновесии, прикладываем в точках S2 и S3 главные векторы сил инерции  и
и  . Величины этих сил определяем по формулам:
. Величины этих сил определяем по формулам:
 .
.
Знак минус в этих формулах показывает, что главные векторы сил инерции направлены противоположно векторам ускорений центров тяжести звеньев.
Величины и направления ускорений центров тяжести звеньев  и
и  определяем по плану ускорений для данного положения механизма.
определяем по плану ускорений для данного положения механизма.
К звену 2 прикладываем еще главный момент сил инерции:
 .
.
Величину углового ускорения определяем следующим образом:
 .
.
Величину и направление  определяем по плану ускорений. Направление
определяем по плану ускорений. Направление  совпадает с направлением .
совпадает с направлением .
Численное значение момента инерции Js2 дано в задании или может быть определено по формуле:

Переходим к определению реакций и , а также реакции  , действующей в шарнире В со стороны звена 2 на звено 3. Расчет производим в следующем порядке:
, действующей в шарнире В со стороны звена 2 на звено 3. Расчет производим в следующем порядке:
1. Рассматриваем равновесие звена 2 и определяем силу  . Так как звено 2 находится в равновесии, то сумма моментов всех сил, приложенных к этому звену, относительно точки В равна нулю:
. Так как звено 2 находится в равновесии, то сумма моментов всех сил, приложенных к этому звену, относительно точки В равна нулю:

или  ,
,
тогда 
В этом уравнении и далее плечи сил обозначены через h с индексами этих сил. Все плечи определяются непосредственным измерением на чертеже с учетом масштабного коэффициента К l.
Если сила получится со знаком минус, то это значит, что она направлена противоположно тому направлению, которое мы первоначально показали на чертеже и использовали при составлении уравнения. В дальнейших расчетах мы должны будем принимать ее действительное направление.
2. Рассматриваем равновесие всей группы в целом и определяем реакции  и .
и .
Так как группа находится в равновесии, то геометрическая сумма всех сил, действующих на ее звенья, равна нулю:

Двумя линиями подчеркнуты силы, известные по величие и по направлению, одной линией - силы, у которых известны только направления.
В соответствии с этим уравнением строим многоугольник сил (план сил). Многоугольник должен быть замкнутым.
Для этого выбираем произвольно масштабный коэффициент сил  и вычисляем длины векторов, которые будут изображать известные силы.
и вычисляем длины векторов, которые будут изображать известные силы.
Чтобы получить длину вектора силы, нужно величину силы разделить на масштабный коэффициент.
Затем, начиная от точки о (рис.2), откладываем последовательно векторы известных сил. В конце каждого вектора делаем стрелку и ставим обозначение силы.
Построение известных сил заканчиваем вектором в точке в. Чтобы замкнуть многоугольник, проводим через точку 0 направление силы , а через точку в - направление силы . Эти силы пересекаются в точке с и замыкают силовой многоугольник. Точка пересечения этих сил определит их величину: отрезок  изображает силу , а отрезок
изображает силу , а отрезок  – силу .
– силу .
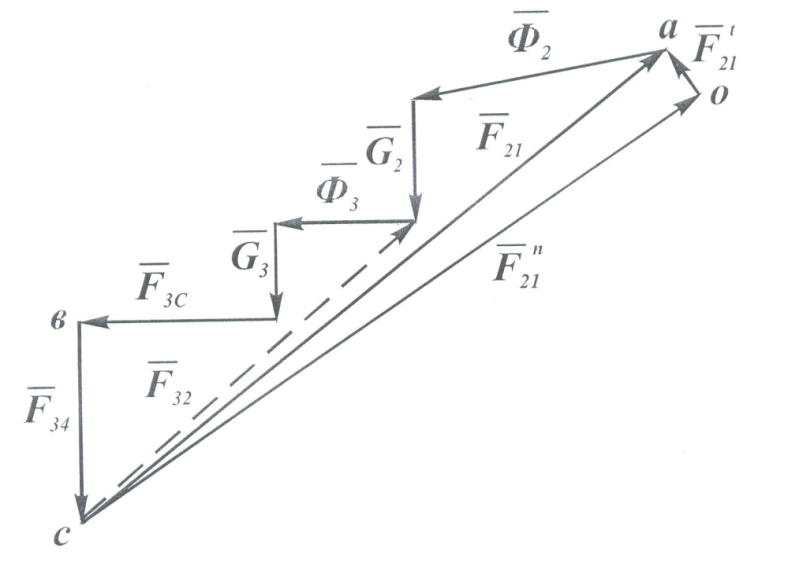
Рисунок 2 - План сил группы Ассура 2-3 (ВВП), К F=..., Н/мм
Определяем их истинные величины:
 .
.
Определив  и , нужно на плане сил найти полную реакцию F21 как их равнодействующую: проведем прямую из начала вектора (точка с) в конец вектора
и , нужно на плане сил найти полную реакцию F21 как их равнодействующую: проведем прямую из начала вектора (точка с) в конец вектора  ; это и будет полная реакция , действующая в точке А. Разумеется
; это и будет полная реакция , действующая в точке А. Разумеется  .
.
3. Рассматриваем равновесие звена 3 и определяем реакцию . Так как звено 3 находится в равновесии, то геометрическая сумма всех сил, действующих на него, равна нулю:
 .
.
Векторная сумма (  ) на плане сил (рис. 2) уже имеется. Соединив конец вектора с началом вектора , получаем искомый вектор . На плане сил он показан пунктиром. Разумеется
) на плане сил (рис. 2) уже имеется. Соединив конец вектора с началом вектора , получаем искомый вектор . На плане сил он показан пунктиром. Разумеется  .
.
На этом заканчивается силовое исследование данной структурной группы.
СИЛОВОЙ РАСЧЕТ ГРУППЫ АССУРА ВТОРОГО КЛАССА С ТРЕМЯ ВРАЩАТЕЛЬНЫМИ КИНЕМАТИЧЕСКИМИ ПАРАМИ
Схема сил такой структурной группы приведена на рисунке 3. Силовой расчет проводим в следующей последовательности.
1. Определяем силы тяжести звеньев G2 и G3:
 ,
,  .
.
2. Определяем главные векторы сил инерции и :
 .
.
Величины и направления ускорений центров тяжести звеньев и определяем по плану ускорений для данного положения механизма.
3. Определяем главные моменты сил инерции звеньев:
 ,
,  .
.
Величины и направления угловых ускорений  и
и  определяем по плану ускорений:
определяем по плану ускорений:
 .
.
Направления и  определяют по направлениям векторов ускорений и
определяют по направлениям векторов ускорений и  .
.

Рисунок 3- Схема сил группы Ассура 2-3 (ВВВ), Kl =…, м/мм
4. Рассматриваем равновесие звена 2 и определяем силу , для чего составляем уравнение моментов сил звена 2 относительно точки В, предварительно выбрав направление силы :
 ;
;
 ;
;
 .
.
Плечи определяем непосредственными измерениями на чертеже с учетом Kl. Если сила  получится со знаком минус, то при дальнейших расчетах нужно изменить ее направление.
получится со знаком минус, то при дальнейших расчетах нужно изменить ее направление.
5. Рассматриваем равновесие звена 3 и определяем силу  , для чего составляем уравнение моментов сил звена 3 относительно точки В, предварительно выбрав направление силы :
, для чего составляем уравнение моментов сил звена 3 относительно точки В, предварительно выбрав направление силы :
 0;
0;
 ;
;
 .
.
6. Рассматриваем равновесие всей группы в целом и определяем силы и  .
.
Поскольку группа находится в равновесии, то геометрическая сумма всех сил, действующих на ее звенья, равна нулю:
 .
.
В соответствии с этим уравнением строим план сил для всей группы Ассура (рис. 4).
Построение ведем в произвольно выбранном масштабе. Начиная с точки о, откладываем последовательно векторы известных сил,  . Проводим через точку с линию, параллельную силе , и через точку о - линию, параллельную силе , находим в пересечении этих линий точку е. Многоугольник сил замкнулся. Определяем искомые нормальные составляющие:
. Проводим через точку с линию, параллельную силе , и через точку о - линию, параллельную силе , находим в пересечении этих линий точку е. Многоугольник сил замкнулся. Определяем искомые нормальные составляющие:
 .
.
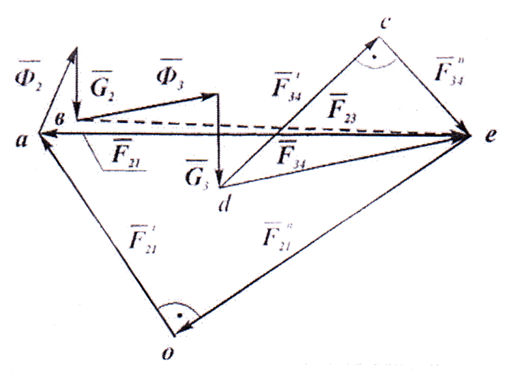
Рисунок 4- План сил группы Ассура 2-3 (ВВВ), К F =..., Н/мм
Соединив точки е и а, получим полную силу :
 .
.
Разумеется .
Аналогично, соединив точки d и e, получим силу :
 .
.
Разумеется 
7. Рассматриваем равновесие звена 2 и определяем силу  :
:
 .
.
Сумма первых трех векторов на плане сил уже построена. Из конца вектора  (из точки в) проводим прямую в начало вектора (точку е). Получаем силу , замыкающую многоугольник сил, действующих на звено 2. Истинная величина этой силы:
(из точки в) проводим прямую в начало вектора (точку е). Получаем силу , замыкающую многоугольник сил, действующих на звено 2. Истинная величина этой силы:
 .
.
На этом заканчивается силовое исследование структурной группы с тремя вращательными кинематическими парами.
Дата добавления: 2021-04-05; просмотров: 138; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!