ПЕРВИЧНОЕ И ВТОРИЧНОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ
Вновь рассмотрим электрическую систему, представленную эквивалентной схемой на рис. 4.1. Процесс регулирования частоты в этой системе можно проследить с помощью графиков, отражающих зависимость мощности турбины от частоты переменного тока на шинах синхронного генератора, рис. 4.7. В этих координатах характеристика АРС турбины 1 будет выглядеть точно также как на рис. 4.6, так как частота переменной ЭДС синхронного генератора пропорциональна скорости вращения.
|
Рис. 4.7. Первичное и вторичное регулирование частоты |

При больших снижениях скорости (а следовательно и частоты) АРС полностью открывает направляющий аппарат турбины. При этом турбина развивает номинальную мощность. Дальнейшее изменение ее при снижении скорости становится невозможным. На рис. 4.7 такому режиму работы отвечает горизонтальный участок характеристики 1.
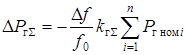
На рис. 4.7 изображена статическая характеристика активной мощности потребления ЭЭС по частоте SPп = jp(f). Пересечение характеристики АРС и характеристики ЭЭС является рабочей точкой (a) исходного режима с частотой f0. Будем считать, что в этом режиме частота в ЭЭС равна номинальной, т. е. f0 = 50 Гц. Мощность исходного режима обозначим P0.
Пусть теперь в ЭЭС происходит наброс потребляемой мощности на величину DP. Новой нагрузке отвечает статическая характеристика SPп + DP, расположенная выше характеристики SPп. Значение частоты f1, отвечающей режиму увеличенного потребления мощности, вновь определяется пересечением характеристики АРС 1 с новой статической характеристикой потребления (рабочая точка b). Из рисунка видно, что f1 < f0 и P1 > P0.
|
|
|
При статической характеристике 1, показанной на рис. 4.7, АРС турбины не восстанавливает частоту до прежнего значения, однако уменьшает отклонение частоты от номинального значения. При отсутствии АРС частота снизилась бы до значения f2 (точка c на прямой 2, f2 < f1 < f0).
Таким образом, регулятор скорости турбины оказывает стабилизирующее действие на частоту в ЭЭС и поэтому часто называется первичным регулятором частоты, а процесс изменения частоты под действием этого регулятора – первичным регулированием частоты.
Эффективность первичного регулирования частоты зависит от статизма регулятора скорости, который характеризует наклон характеристики АРС к осям координат. Меньшему статизму соответствует более крутая характеристика регулирования, которая пересекается с характеристикой ЭЭС при большем значении частоты. При нулевом статизме регулятора (астатическое регулирование) характеристика располагается вертикально (характеристика 4) и обеспечивает частоту, равную номинальной при любом набросе мощности нагрузки ЭЭС, если, конечно, он не приведет к превышению предельной мощности турбины.
|
|
|
Для дополнительной корректировки частоты после первичного регулирования применяется так называемое вторичное регулирование, в процессе которого осуществляется изменение мощности турбины уже непосредственно в зависимости от частоты переменного тока в электрической сети.
При вторичном регулировании мощность турбины изменяется дополнительным воздействием на нее регулирующего аппарата, которое выполняет еще одно регулирующее устройство – автоматический регулятор частоты (АРЧ), рис. 4.8.

Рис. 4.8. Схема регулирования АРС и АРЧ
АРЧ также основан на принципе ООС и воздействует непосредственно на АРС. Графически вторичное регулирование отражается (см. рис. 4.7) эквидистантным перемещением характеристики регулирования 1 вправо (характеристика 3). Турбина набирает мощность P2, соответствующую новой нагрузке ЭЭС (рабочая точка d). Наклон характеристики регулирования, характеризующий статизм регулятора, при этом не меняется.
При сбросе мощности нагрузки в ЭЭС направление регулирования будет обратным и регулирование приведет к уменьшению мощности вырабатываемой турбиной.
|
|
|
Совместная работа всех турбин в ЭЭС при регуляторах скорости с астатической характеристикой не может быть реализована. Это объясняется тем, что каждая из параллельно работающих турбин с астатическим регулятором при толчках нагрузки стремится принять весь небаланс мощности на себя. При этом режим работы отдельных агрегатов не может регулироваться: на одних агрегатах происходит увеличение мощности, а другие сбрасывают свою нагрузку.
Астатический регулятор мог бы устанавливаться на одном из агрегатов. При этом не будет неопределенного распределения мощности между отдельными машинами, так как небаланс мощности покроется генератором, снабженным астатическим регулятором, который будет стремиться поддерживать частоту близкой к номинальному значению. Однако АРС с астатической характеристикой не позволяют обеспечить требуемую точность поддержания частоты и поэтому всегда имеют некоторый статизм, а заданная частота поддерживается дополнительным изменением пуска энергоносителя при вторичном регулировании частоты.
Коэффициент kг, равный тангенсу угла наклона характеристики АРС (рис. 4.7) к оси абсцисс, называется круизной характеристики регулирования
|
|
|
 , ,
| (4.13) |
где  , f0 – номинальная частота.
, f0 – номинальная частота.
Крутизна регуляторов скорости турбины зависит от конструкции и настройки регулирующего устройства. Обычно коэффициент крутизны выбирают в пределах 25…50 для гидрогенераторов и 15…20 для турбогенераторов.
Статизм характеристики регулятора s есть величина, обратная коэффициенту крутизны:
 (в процентах). (в процентах).
|
Астатическому регулированию отвечает значение kг = ¥. Из (4.13) следует, что
 . .
| (4.14) |
При конечном значении коэффициента крутизны (kг ¹ 0) уравнение (4.14) определяет закон статического, или первичного, регулирования частоты. В этом случае при изменении генерирующей мощности на величину DPг уравнение удовлетворяется при Df ¹ 0, т. е. действительно имеют место условия, отвечающие статическому регулированию. Вторичное регулирование независимо от величины DPг обуславливает равенство Df = 0, т. е. по своему конечному эффекту вторичное регулирование эквивалентно астатическому регулированию скорости. В этом случае, как следует из (4.14), при kг = ¥ будем иметь
 . .
| (4.15) |
Это уравнение определяет закон вторичного регулирования частоты.
Из (4.14) можно получить изменение генерирующей мощности ЭЭС при изменении частоты
 . .
| (4.16) |
Здесь знак минус означает, что при уменьшении частоты (Df < 0) мощность генератора растет (DPг > 0).
Аналогично коэффициенту крутизны kг характеристики регулирования вводится понятие коэффициента крутизны статической характеристики нагрузки ЭЭС. Фактически этот коэффициент характеризует наклон касательной к характеристике нагрузки, проведенной в рабочей точке, и является регулирующим эффектом активной нагрузки по частоте (см. рис. 1.24).
Изменение активной мощности нагрузки ЭЭС с учетом потерь в сети:
 , ,
| (4.17) |
где Pн – суммарная мощность нагрузки (с учетом потерь в сети);
kн – коэффициент крутизны характеристики активной мощности нагрузки ЭЭС:  ;
;  ;
;  .
.
Знак плюс в (4.17) означает, что с увеличением частоты (Df > 0) мощность нагрузки растет (DPн > 0).
Крутизна частотной статической характеристики активной нагрузки равна всего лишь 1…2,5, т. е. изменение нагрузки составляет 1…2,5 % на 1 % изменения частоты.
Дополнительная нагрузка (наброс мощности) DP, вызвавшая изменение частоты на величину Df:
|
Отношение  (номинальная генерирующая мощность к фактической нагрузке) называется коэффициентом резерва r. Таким образом, имеем:
(номинальная генерирующая мощность к фактической нагрузке) называется коэффициентом резерва r. Таким образом, имеем:
 . .
| (4.18) |
Отсюда изменение частоты, вызванное дополнительной нагрузкой DP, при выполнении первичного регулирования получается:
 . .
| (4.19) |
Пример. Номинальная мощность генератора Pг ном = 500 МВт. Нагрузка ЭЭС при f0 = 50 Гц Pн = 400 МВт. Коэффициент крутизны характеристики регулирования kг = 20, коэффициент крутизны статической характеристики нагрузки kн = 1. Определить изменение частоты в ЭЭС при набросе мощности нагрузки ЭЭС на 60 МВт.
Коэффициент резерва  .
.
В соответствие с (4.19) имеем:
 . .
|
При отсутствии регулирования kг = 0:
 . .
|
РЕГУЛИРОВАНИЕ ЧАСТОТЫ В ЭЭС
В реальной ЭЭС содержится большое количество параллельно работающих станций. Турбины каждой из этих станций снабжены статическими регуляторами скорости. Следовательно, для каждого генератора всех станций справедливо уравнение (4.14).
Запишем это уравнение для всех n генераторов станций, входящих в состав ЭЭС:
|
Просуммировав левые и правые части записанных уравнений, получим
 . .
| (4.20) |
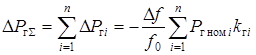
Введем понятие средней крутизны характеристики регулирования генерирующей мощности ЭЭС kгS, для чего запишем уравнение:
 , ,
|
откуда
 , ,
| (4.21) |
где через PЭЭС обозначена суммарная номинальная мощность генераторов электростанций ЭЭС.
Суммарное изменение генерирующей мощности ЭЭС в результате первичного регулирования при изменении частоты на Df можно определить по формуле:
 . .
| (4.22) |
С учетом (4.22) уравнение (4.16) запишется в виде:
 . .
| (4.23) |
Уравнение (4.23) характеризует закон первичного регулирования частоты в реальной системе. Как и в случае простой системы с одной турбиной, в сложной системе регуляторы скорости турбин не обеспечивают поддержания заданного значения частоты. Это следует из (4.22), поскольку при kгi ¹ ¥ (i = 1,2,…,n) средневзвешенная величина kгS является конечной величиной и регулирование оказывается статическим.
Пример. В ЭЭС входят турбо- и гидрогенераторы, как показано в табл. 4.1.
Таблица 4.1
Данные по генераторам ЭЭС примера
| Характеристики | Турбогенераторы | Гидрогенераторы |
| Мощность, P, МВт | 100 | 50 |
| Количество | 20 | 10 |
| Коэффициент крутизны статических характеристик, kг | 15 | 30 |
| Загрузка генераторов | 10 по 100 % и 10 по 50 % | 60 % |
Крутизна статической характеристики нагрузки kн = 2. Определить отклонение частоты в ЭЭС при увеличении нагрузки потребителей на DP = 100 МВт.
Номинальная мощность системы: PЭЭС = 20 × 100 + 10 × 50 = 2500 МВт.
Мощность нагрузки: Pн = 10 ×100 + 10 × 100 × 0,5 + 10 × 50 × 0,6 = 1800 МВт.
Коэффициент резерва:
 . .
|
Согласно формуле (4.21),
 . .
|
Отклонение частоты:
 . .
|
Для получения эффекта астатического регулирования следует произвести вторичное регулирование, при котором kгS = ¥. В сложной системе такое значение kгi может быть получено в том случае, если хотя бы для одной станции kгS = ¥.
Следовательно, осуществляя вторичное регулирование на любой станции ЭЭС, можно получить эффект астатического регулирования. Такой же эффект получается при вторичном регулировании и на большем числе станций.
Наиболее просто вторичное регулирование реализуется с помощью одной станции. Метод такого регулирования называется методом ведущей станции по частоте.
|
Рис. 4.9. Регулирование частоты в ЭЭС |

Рассмотрим работу станций при регулировании частоты этим методом. Так как в конечном итоге станция, регулирующая частоту, берет на себя все возникающие небалансы (набросы и сбросы) мощности в ЭЭС, то ее еще называют балансирующей станцией.
Пусть в исходном режиме ЭЭС работает с номинальной частотой f0 и суммарной мощностью станций PS0. Станция, регулирующая частоту, несет нагрузку Pб0 (рис. 4.9). Характеристика регулятора скорости этой станции занимает положение 1. Все остальные станции несут нагрузку PS0 – Pб0.
Предположим, что нагрузка ЭЭС увеличилась на DPS. Частота в ЭЭС снизилась до значения f1. Эта стадия процесса регулирования является первичным регулированием частоты в ЭЭС. На балансирующей станции мощность увеличилась на DPб1, а на остальных станциях на DPS1.
Установление номинальной частоты в ЭЭС происходит на стадии вторичного регулирования. АРЧ станции ведущей по частоте изменяет положение регулировочной характеристики АРС этой станции таким образом, что, перемещаясь вправо, она занимает положение 2, при котором весь наброс мощности компенсируется генераторами балансирующей станции. Другие станции, которые участвовали в регулировании на стадии первичного регулирования частоты, будут вырабатывать прежнюю мощность исходного режима. Частота в ЭЭС будет восстановлена до номинального значения.
На рис. 4.9 отмечены точки рабочего режима балансирующей станции. Точка a – исходный режим, точка b – режим в конце стадии первичного регулирования и точка c – новый режим в конце всего процесса регулирования. Следует отметить, что такого четкого разделения первичного и вторичного регулирования по времени на самом деле не существует и в процессе регулирования происходит наложение обоих видов регулирования частоты.
Для успешного регулирования частоты станция, выбираемая в ЭЭС в качестве ведущей, должна удовлетворять определенным требованиям, главными из которых являются следующие:
· достаточно большая мощность по отношению к мощностям других электростанций данной ЭЭС;
· большой диапазон регулирования мощности – пределами, в которых возможно быстрое изменение мощности, выдаваемой электростанцией;
· достаточно большая пропускная способность линий (сечений), связывающих электростанцию с мощными узлами нагрузки и другими электростанциями, так как регулирование частоты связано со значительными изменениями мощности в линиях.
На тепловых станциях пределы изменения выдаваемой мощности определяются условиями работы котельных агрегатов и паровых турбин. Наибольшие ограничения диапазона регулирования связаны с работой котлов, которые обычно не допускают изменения уменьшения нагрузки ниже, чем на 60 % от номинальной. Снижение нагрузки котлов ограничивается опасностью погасания факела пылеугольных топок и опасностью нарушения нормальной циркуляции из-за неравномерного обогрева отдельных частей котла при уменьшении интенсивности горения. Нижняя граница регулировочного диапазона паровых турбин составляет обычно 20…30 % от их номинальной мощности. Она определяется возможностью резкого нарушения температурного режима турбины при значительном снижении нагрузки, результатом которого могут являться недопустимые температурные перенапряжения и связанные с ними повреждения машины.
Таким образом, вследствие ограничения регулировочного диапазона тепловых электростанций, в качестве станций, ведущих частоту, выбирают станции, мощность которых в два-три раза превышает величину наибольшего возможного наброса или сброса нагрузки в данной ЭЭС. Наилучшие условия для регулирования частоты имеют электростанции с конденсационными турбинами и котлами, работающими на газообразном топливе.
Регулировочный диапазон гидравлических электростанций практически близок к их установленной мощности. Поэтому мощность гидроэлектростанций, используемых для регулирования частоты, может быть значительно меньше мощности тепловых станций в условиях одной и той же ЭЭС.
В ЕЭС России в регулировании частоты и перетоков мощности по ЛЭП задействуются такие крупные гидроэлектростанции, как: Волжская, Саратовская, Волгоградская, Воткинская, Камская, Чиркейская, Верхне-Туломская, Княжегубская, Нива-3, Чиркейская, Саяно-Шушенская, Красноярская, Усть-Илимская и Зейская.
|
Рис.4.10. Регулирование частоты при дефиците мощности |
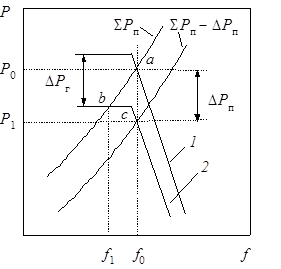
Восстановление номинальной частоты в ЭЭС после нарушения баланса активной мощности возможно лишь тогда, когда в ЭЭС имеется достаточный резерв генераторной мощности. На рис. 4.10 показаны характеристики генерируемой мощности SPг – 1 и статическая характеристика нагрузки ЭЭС SPп в случае напряженного баланса мощности. В такой системе значению частоты в исходном режиме f0 отвечает точка пересечения характеристик 1 и SPп – a, находящаяся в области значений мощности, близкой к предельной для генераторов. Изменение (уменьшение) генерирующей мощности на величину DPг вследствие аварийного отключения генераторов вызывает снижение частоты до значения f1 – рабочая точка b. В этом случае невозможно изменение этого значения за счет регулирования мощности генераторов, поскольку генераторы выдают предельную мощность, и регулировочный диапазон турбин оказывается полностью исчерпанным.
Опасные последствия, которые может повлечь значительное снижение частоты в ЭЭС, в частности опасность нарушения нормальной работы оборудования электростанций, заставляют в этих случаях применять в ЭЭС автоматическую аварийную разгрузку по частоте (ААРЧ).
Целью такой разгрузки является восстановление баланса активной мощности путем уменьшения мощности, потребляемой нагрузками ЭЭС. ААРЧ заключается в отключении части потребителей при уменьшении частоты в ЭЭС ниже определенной границы и осуществляется при использовании средств системной автоматики.
На рис. 4.10 отключение части нагрузки отражено другой статической характеристикой нагрузки ЭЭС SPп – DPп. В этом случае становится возможным первичное и вторичное регулирование частоты (рабочая точка c).
Для уменьшения по возможности ущерба от отключения части потребителей по мере снижения частоты потребители отключаются автоматически в несколько очередей. ААРЧ выполняется с помощью устройств, реагирующих на отклонение частоты от номинальной и дающих команду на отключение тех или иных элементов ЭЭС.
Дата добавления: 2021-03-18; просмотров: 423; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!