ОБОСНОВАНИЕ ВЫБОРА ОБЪЕКТА МОДЕЛИРОВАНИЯ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное учреждение
Высшего профессионального образования
«Санкт-Петербургский государственный университет аэрокосмического приборостроения»
КАФЕДРА МИКРО- И НАНОТЕХНОЛОГИЙ АЭРОКОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ
ОЦЕНКА
ПРЕПОДАВАТЕЛЬ
| доц. к.т.н | Анодина-Андриевская Е.М. | |||
| должность, уч. степень, звание | подпись, дата | инициалы, фамилия |
| ОТЧЕТ ПО ДОМАШНЕЙ РАБОТЕ |
| Тема работы: МАТЕМАТИЧЕСКАЯ МОДЕЛЬ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА УСКОРЕНИЯ |
| по дисциплине: Математическое моделирование электронных средств |
РАБОТУ ВЫПОЛНИЛ
| СТУДЕНТ ГР. | 3250М | Карпиков С.Р. | |||
| подпись, дата | инициалы, фамилия |
Санкт-Петербург 2012
СОДЕРЖАНИЕ
Введение. 3
1 Классификация микромеханических датчиков ускорения. 5
2 Обоснование выбора объекта моделирования. 11
3 Математическое описание функционирования объекта. 13
4 Программа и результаты моделирования функционирования микромеханического датчика. 15
5 Выводы по работе. 30
Заключение. 31
Литература. 32
ВВЕДЕНИЕ
Темой работы является создание математической модели микромеханического датчика ускорения (акселерометра) с электромагнитным силовым преобразователем (далее - датчика). Конструкция рассматриваемого датчика, выполненная в микромеханическом масштабе, является принципиально новой [1], и производство опытных образцов датчика потребует больших денежных вложений, а также займёт много времени перед тем, как можно будет начать испытания и доработку конструкции для соответствия требованиям и обеспечения заданного функционала. Поэтому, целесообразно провести математическое моделирование и на полученной модели отработать особенности конструкции и параметры элементов датчика. Также, это целесообразно ввиду повышенных требований к средствам измерения, необходимым для проведения испытаний опытного образца и испытательным стендам, так как требуется измерять перемещения чувствительного элемента на уровне долей микрометра при воздействии внешнего ускорения в разных направлениях.
|
|
|
Рассматриваемый датчик имеет в своём составе чувствительный элемент, с нанесённым на его поверхность материалом с особыми магнитными свойствами. Важным является изучение характеристик этого покрытия в зависимости от его формы, размеров и химического состава [2], в связи с этим, актуальность создания математической модели состоит и в необходимости выбора рационального варианта конструкции, из множества технологически реализуемых, после проведения комплексного анализа всей системы, что может быть невозможным при проведении только физических экспериментов на опытных образцах.
|
|
|
Целью моделирования является создание адекватной реальному датчику математической модели, которая бы позволяла, внося соответствующие изменения в конструкцию моделируемого датчика (изменение входных параметров), получать результаты, по которым можно было бы предсказать поведение и свойства реальной системы с необходимой точностью, а также проведение исследования конструкции и функционирования датчика, с использованием построенной модели, при различных внешних воздействиях.
Для достижения поставленной цели необходимо решить следующие задачи:
¾ составить классификацию микромеханических датчиков ускорения и провести сравнение датчика рассматриваемой конструкции с аналогами
¾ рассмотреть области применения датчика и основные технические требования, которые следует учесть при моделировании
¾ составить математическое описание работы датчика
¾ выбрать программную среду для проведения моделирования функционирования датчика
|
|
|
¾ составить программу (модель) в выбранной среде моделирования
¾ оптимизировать составленную модель для обеспечения заданной точности при минимальном количестве вычислений
¾ провести моделирование при разных параметрах конструкции датчика, изменяя входные параметры системы для соответствия реальным условиям функционирования
¾ проанализировать результаты моделирования и сделать вывод о достоинствах и недостатках рассматриваемой конструкции, предложить методы устранения выявленных недостатков, при необходимости повторить моделирование, изменив модель.
1 КЛАССИФИКАЦИЯ МИКРОМЕХАНИЧЕСКИХ
ДАТЧИКОВ УСКОРЕНИЯ
Существующие на сегодняшний момент микромеханические датчики, предназначенные для измерения линейного ускорения можно классифицировать по следующим свойствам [2]:
1) Метод съёма показаний – метод, на основе которого получается электрический сигнал, соответствующий изменению неэлектрической величины (перемещения, частоты колебаний чувствительного элемента).
Ёмкостной метод съёма показаний – наиболее распространёнными являются датчики с ёмкостными преобразователями – в них перемещение подвижного чувствительного элемента в виде пластины фиксируется за счёт измерения ёмкости между ним и неподвижной пластиной. Достоинством метода является простота конструкции, а недостатком – малая чувствительность и малое отношение сигнал/шум, ввиду того, что приходится измерять ёмкости на уровне фемтофарад.
|
|
|
Оптический метод съёма – чувствительный элемент имеет щель, прозрачную для оптического излучения, либо растр. На корпусе прибора устанавливаются излучатель и фотоприёмник, и, при перемещении чувствительного элемента, фиксируется момент пересечения щелью оптической оси. Достоинство – сигнал на выходе имеет только два уровня, что является защитой от помех и позволяет напрямую использовать его в цифровой схеме. Недостатком является возможность фиксирования только определенных дискретных положений чувствительного элемента.
Магнитоэлектрический (либо электромагнитный) метод съёма показаний – на чувствительном элементе расположен магнит, который при перемещении индуцирует в неподвижной катушке, расположенной на корпусе, электрический ток. Метод не получил распространения, ввиду очень малой точности и невозможности снятия показаний только с неподвижного чувствительного элемента.
Метод съёма на основе туннельного эффекта – на чувствительном элементе и на неподвижной части корпуса расположены два автоэмиссионных контакта, ток между которыми зависит от положения чувствительного элемента. Недостатком является низкая чувствительность подобных преобразователей.
2) Тип силового привода. Некоторые конструкции датчиков ускорения предполагают, что чувствительный элемент приводится в колебательное движение, и в процессе работы измеряются параметры этого движения.
Электростатический преобразователь – работает за счёт электростатического взаимодействия двух пластин, одна из которых закреплена на чувствительном элементе. Достоинством является простота реализации, а недостатком – малые силы взаимодействия.
Магнитоэлектрический преобразователь – работает за счёт взаимодействия магнитного поля, создаваемого постоянным магнитом, расположенным на корпусе датчика с полем, вызванным прохождением тока через катушку (либо токопроводящие полоски), расположенную на поверхности чувствительного элемента. Достоинство преобразователя состоит в гораздо большей, по сравнению с электростатическим преобразователем, силе взаимодействия. Недостатком является необходимость подведения тока к катушке, так как в этом случае токопроводящие дорожки необходимо вести через упругие подвесы, ширина которых мала. Это накладывает ограничение на максимально допустимую силу тока, и, следовательно, на силу взаимодействия.
Электромагнитный преобразователь – его принцип действия аналогичен магнитоэлектрическому с тем исключением, что на чувствительном элементе расположен постоянный магнит, а катушки расположены на корпусе датчика. Это снимает ограничения на силу тока, пропускаемого в катушке, но накладывает ограничения на размеры и свойства магнита, расположенного на чувствительном элементе.
3) Количество осей, вдоль которых измеряется ускорение. Может быть одна, две или три оси.
4) Выходной сигнал – может быть аналоговый, цифровой, в виде ШИМ или по какому-либо интерфейсу, например SPI или I2C.
5) Герметизация. Применяется при высокой демпфирующей силе во внешней среде, в этом случае объём датчика может заполняться инертным газом или вакуумом.
Рассматриваемый датчик ускорения построен с использованием электромагнитного силового преобразователя и оптического метода съёма показаний, съём производится вдоль одной оси. Выходной сигнал в виде ШИМ. Герметизация не производится.
Среди наиболее известных зарубежных фирм, производящих датчики ускорения, можно назвать Analog Devices, STMicroelectronics, Freescale и многие другие.
Примеры микромеханических датчиков ускорения:
- серия ADXL производства Analog Devices: ADXL001, ADXL103, ADXL180, ADXL193 и т.д. Различаются чувствительностью, размерами корпуса, типом выходного сигнала и пр.
Акселерометр ADXL001 показан на рисунке 1, а структурная схема, показывающая его устройство, на рисунке 2.

Рисунок 1 - Акселерометр ADXL001 фирмы Analog Devices
Рисунок 2 – Схема акселерометра ADXL001
Акселерометр ADXL001 обладает следующими характеристиками:
Диапазон измеряемых ускорений ± 70g, ± 250g, ± 500g.
Нелинейность выходных характеристик 0,2%
Шум: 4 мg/√Гц
Чувствительность 16 мВ/g
Измерение ускорения вдоль одной оси.
Частота резонанса 22кГц.
Аналоговый выход
Напряжение питания от 3.2В до 6В.
8-ми выводной керамический корпус
- серии AIS и LIS фирмы STMicroelectronics, например AIS1200DS, AIS226DS, AIS326DQ, LIS202DL, LIS 244ALH и т.д.
Одноосевой акселерометр AIS1200DS показан на рисунке 3, а его структурная схема на рисунке 4.

Рисунок 3 - Акселерометр AIS1200DS фирмы STMicroelectronics
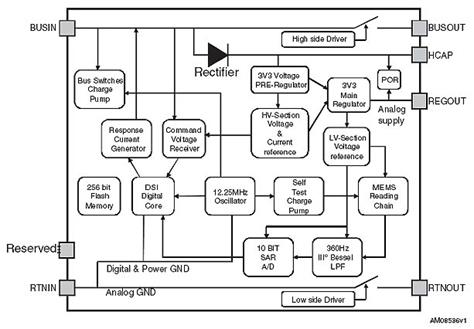
Рисунок 4 – Схема акселерометра AIS1200DS
Акселерометр AIS1200DS обладает следующими характеристиками:
Диапазон измеряемых ускорений ± 235g.
Нелинейность выходных характеристик 0,3%
Чувствительность 0.49 g/LSb
Измерение ускорения вдоль одной оси.
Частота резонанса 19.6 кГц.
Цифровой выход, 10 разрядов
Напряжение питания от 6.5В до 30В.
Корпус SO16W
- серия MMA фирмы Freescale Semiconductor, акселерометры MMA1612NKW, MMA6260Q, MMA1260D, MMA3201D, MMA2300D и пр.
Рисунок 5 – Акселерометр MMA1612NKW

Рисунок 6 – Схема акселерометра MMA1612NKW
Диапазон измеряемых ускорений от ±50g до ±312.5g
Нелинейность выходных характеристик 2%
Чувствительность 0.24 g/LSb
Измерение ускорения вдоль одной оси.
Частота резонанса 15.1 кГц.
Цифровой выход, 10 разрядов
Напряжение питания от 6.3В до 30В.
Корпус 16-выводной QFN.
Все приведённые датчики используют электростатический метод съёма, в этом заключается принципиальное отличие их от разрабатываемого датчика. Использование электромагнитного силового преобразователя, оптического метода съёма и режима автоколебаний позволит улучшить метрологические характеристики датчика, такие как погрешность, чувствительность, величина дрейфа, минимальное измеряемое ускорение и пр.[4].
ОБОСНОВАНИЕ ВЫБОРА ОБЪЕКТА МОДЕЛИРОВАНИЯ
В перечень критических технологий Российской федерации включена микросистемная техника, а также технологии высокоточной навигации и управления движением. Это означает высокую востребованность государства в этих направлениях, которым соответствует и разрабатываемый датчик ускорения. Он может применяться как в военной, так и в гражданской технике, в системах ориентации и навигации, мобильных устройствах, автомобилях и бытовой технике. Далее приведён список возможных вариантов применения микромеханического датчика ускорения:
- система управления летательных аппаратов: так как ускорение это вторая производная от перемещения, то зная ускорение, можно определять местоположение объекта в пространстве.
- системы безопасности автомобилей: во избежание тяжких последствий ДТП, бортовой компьютер может управлять траекторией движения автомобиля при ударах, направление и величина которых фиксируются датчиком ускорения. Этот же датчик можно использовать для предотвращения угона автомобиля.
- Бытовая техника: уменьшение вибрации и шума, например от работающей стиральной машины, за счёт перераспределения нагрузки в барабане. При этом, датчик ускорения улавливает вибрацию и передаёт в схему управления, которая вырабатывает противодействующий сигнал. А также, при улучшении баланса загрузки можно достичь более высокой скорости вращения барабана, что позволяет выжимать большее количество воды из одежды, делая процесс сушки более эффективным.
- Аудиосистемы: добавление обратной связи путём установки датчика ускорения на резонаторе динамика. Это позволяет улучшить качество звучания, за счёт уменьшения гармонических искажений, использовать меньшие корпуса динамиков при большей мощности звучания.
- Промышленное оборудование: анализ характера вибрации подшипников во время работы установки позволяет выявить их износ.
Акселерометры можно использовать и для стабилизации платформ, выравнивая их с уровнем горизонта.
- Портативная электроника: использование акселерометров в мобильных телефонах даёт возможность реализовать дополнительные функции, например управление наклоном корпуса. А также использовать навигацию в тот момент, когда сигналы GPS недоступны.
- Использование в медицине: стимуляция мышц в нужное время (например, стимуляция мышц стопы при наклоне голени) позволит людям, страдающим мышечными заболеваниями, тратить меньше усилий при движении.
Исходя из всего перечисленного, следует сделать вывод, что разработка и производство миниатюрных датчиков ускорения являются одними из востребованных направлений развития современной техники, как в России, так и за рубежом.
Выбор в качестве объекта моделирования именно датчика с электромагнитным силовым преобразователем и оптическим методом съёма показаний был сделан исходя из того, что это новая и детально не изученная конструкция, требующая анализа и проработки. Результатом моделирования должно стать подтверждение или опровержение следующих гипотез:
- Использование электромагнитного силового преобразователя позволит повысить силы взаимодействия, по сравнению с традиционно используемым электростатическим преобразователем.
Дополнительно, повышение сил взаимодействия позволит отказаться от герметизации корпуса, так как демпфирующие силы при движении чувствительного элемента в воздухе будут существенно меньше противодействующих им сил электромагнитного взаимодействия.
- Использование оптического метода съёма показаний позволит получать на выходе датчика положения чувствительного элемента сразу ШИМ сигнал, в отличие от традиционного применения схемы измерения ёмкости. Это должно сказаться и на точности измерений.
- Использование режима автоколебаний позволит сократить энергетические затраты на приведение системы в колебательное движение.
- Расположение магнитного покрытия на поверхности чувствительного элемента увеличит его массу, что позволит регистрировать меньшие значения воздействующего внешнего ускорения.
- Это принципиально нелинейная система и, благодаря нелинейности, вносимой в контур датчика, можно уменьшить выходную нелинейность показаний.
При моделировании нужно проанализировать величину силы, которую можно получить, используя электромеханический преобразователь, будет ли полученной силы достаточно, чтобы поддерживать режим автоколебаний. Также, при моделировании нужно учесть различный характер возможных внешних воздействий (форму воздействующего ускорения) и определить требования для электрической схемы преобразования измеренного сигнала для обеспечения заданной точности измерений.
Дата добавления: 2020-12-12; просмотров: 189; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!