Примеры мехатронных модулей движения
Практическое занятие №2
Знакомство с конструкцией модулей движения
Цель работы: Изучение конструкции модулей движения
Классификация мехатронных модулей
Целью любой классификации является систематизация информации о некотором объекте в виде упорядоченной структуры для выполнения задач объективного (обеспечение полноты информации) и сравнительного (обеспечение информацией для сравнения) представления объекта. Использование иерархической структуры позволяет упростить поиск интересующей информации об объекте. Это позволяет создать эффективные информационно-поисковые системы на базе компьютерных баз данных.
Классификация характеризуется объектом, признаками классификации и их последовательностью. Согласно классификации создаются образы объекта. Поэтому для одного и того же объекта в зависимости от выбранных признаков и их последовательности, можно построить разные варианты иерархического дерева, т.е. несколько различных классификаций. Выбор предпочтительной классификации осуществляется исходя из требований решения определенной задачи.
На рис. 2.1 представлена классификация мехатронных модулей по конструктивным признакам.
В данной классификации выделено 3 признака достаточно полно характеризующих конструкцию мехатронных модулей (уровень интеграции, число степеней подвижности и вид движений), а также комплекс признаков (технические характеристики), определяющий функциональные возможности модулей.
|
|
|
Классификация мехатронных модулей предусматривает по уровню интеграции: модули движения, мехатронные модули движения и интеллектуальные мехатронные модули. По числу степеней подвижности – 1, 2, 3, и > 3. По виду движений – поступательные и вращательные.
Комплекс признаков технических характеристик включает: развиваемую силу и крутящий момент; величину, быстродействие и точность рабочего хода (линейного и углового).
Рассмотрим мехатронные модули согласно представленной классификации.
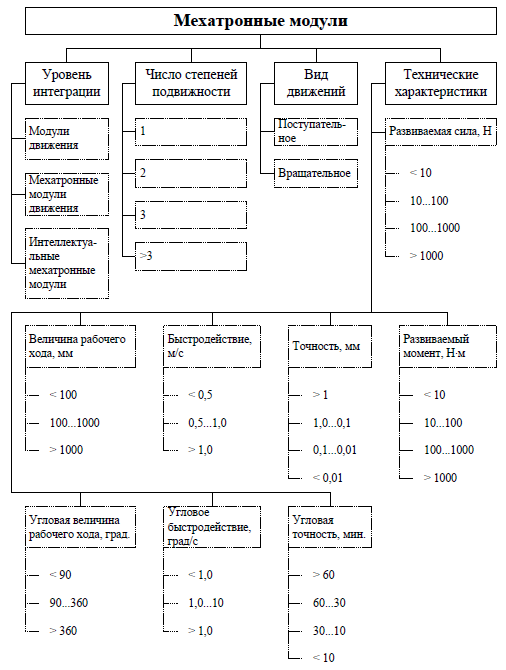
Рис. 2.1. Классификация мехатронных модулей
Преобразователи движения
Передача движения от двигателя к выходному звену мехатронного модуля может быть обеспечена с помощью различных преобразователей движения (передач), структура и конструктивные особенности которых зависят от типа двигателя, вида перемещения выходного звена и их расположения (компоновки).
Преобразователи движения предназначены для преобразования одного вида движения в другое, согласования скоростей и вращающих моментов двигателя и выходного звена. Для преобразования движения используют винтовые, реечные, цепные, тросовые передачи, а также передачи зубчатым ремнем, мальтийские механизмы и др. Так как электродвигатели в основном высокооборотные, а рабочие скорости выходных звеньев мехатронных моду- лей сравнительно невелики, то для согласования скоростей используют понижающие передачи (редукторы): зубчатые цилиндрические и конические, червячные, планетарные и волновые. Тип преобразователя движения выбирают, исходя из сложности его конструкции, коэффициента полезного действия, люфта в передаче, габаритных размеров и массы, свойств самоторможения, жесткости, удобства компоновки, технологичности, долговечности, стоимости и т. п. Выбор преобразователя движения оказывает существенное влияние на характеристики мехатронного модуля.
|
|
|
Реечные передачи
Реечная передача предназначена для преобразования вращательного движения шестерни в поступательное движение рейки и, наоборот, поступательного движения рейки во вращательное движение шестерни.
Основными звеньями реечной передачи являются шестерня и зубчатая рейка (рис. 2.2).

Рис. 2.2. Реечная передача
Шестерня- рейка могут иметь прямозубое или косозубое зацепление.
Сегодня вместо зубчатой рейки применяется зубчатый ремень, соединяющий шестерню с подвижной кареткой, на которой крепится объект позиционирования (рис. 2.3).
|
|
|

Рис. 2.3. Привод с зубчатым ремнем с шариковой линейной направляющей EGC-TB-KF фирмы Фесто
Конические редукторы
Конические редукторы предназначены для увеличения крутящего момента и передачи под углом 900 .
В конических редукторах используются конические, гипоидные или червячные передачи (рис.2.4).
Червячные редукторы отличаются высокой плавностью хода, низким уровнем шума. Присутствующее трение скольжения снижает коэффициент полезного действия, но при этом обеспечивается необратимость механизма (самоблокировка). В многозаходных червячных редукторах обеспечивается обратимость механизма (рис.2.5).
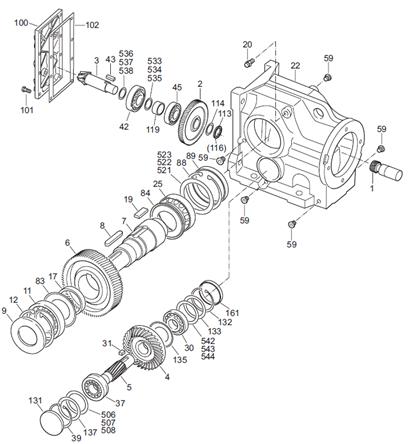
Рис. 2.4. Базовая конструкция конического редуктора фирмы SewEurodrive
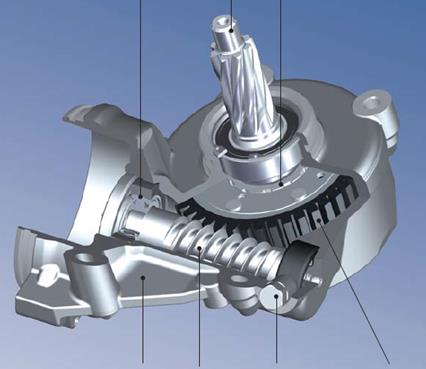
Рис.2.5. Червячный редуктор сервоусилителя рулевого управления
Планетарные передачи
Планетарными называют передачи, содержащие зубчатые колеса, оси которых подвижны, как показано на рис. 2.5. Движение этих колес сходно с движением планет и поэтому их называют планетарными или сателлитами.
|
|
|
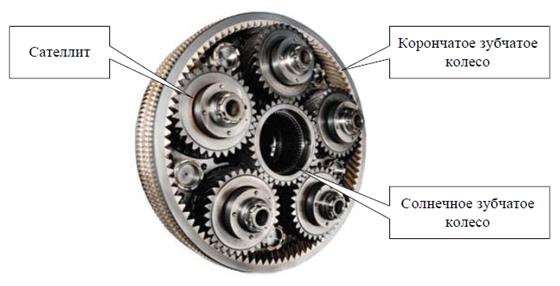
Рис. 2.5. Планетарная передача
Простейшая планетарная передача состоит из центрального солнечного зубчатого колеса с наружными зубьями, центрального корончатого зубчатого колеса с внутренними зубьями, сателлитов с внешними зубьями, которые входят в зацепление одновременно с солнечным и корончатым колесами, и водила, на котором расположены оси сателлитов (см. рис. 2.5).
В современных мехатронных модулях планетарные зубчатые передачи находят широкое применение благодаря их компактности и малой массы, реализации больших передаточных отношений, малой нагрузки на опоры, большого коэффициента полезного действия, высокой кинематической точности, жесткости и надежности.
При проектировании планетарных зубчатых передач следует учитывать и их недостатки: конструктивную сложность, повышенные требования к точности изготовления и монтажа, снижение коэффициента полезного действия при увеличении передаточного отношения.
В зависимости от порядка наложения связей на звенья планетарные передачи могут использоваться как для суммирования не скольких вращательных движений, так и для их разделения между несколькими ведомыми валами.
Волновые зубчатые передачи
Работа волновой передачи основана на принципе преобразования параметров движения вследствие волнового деформирования одного из звеньев механизма. Этот принцип впервые был предложен в 1944 году А.И. Москвитиным для фрикционной передачи с электромагнитным генератором волн, а затем в 1969 г. В. Массером для зубчатой передачи с механическим генератором волн. С точки зрения кинематики она представляет собой плане- тарную передачу, у которой одно из колес выполнено в виде гибкого венца.
Волновая зубчатая передача состоит из гибкого зубчатого колеса с наружными зубьями, жесткого зубчатого колеса с внутренними зубьями и генератором волн (рис. 2.6).
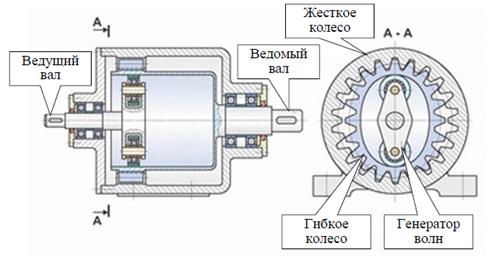
Рис. 2.6. Волновая зубчатая передача
Недостатками волновых передач являются: ограничение по частотам вращения ведущего вала генератора волн при больших диаметрах колес (во избежание высокой окружной скорости генератора), мелкие модули зубьев колес, меньшая крутильная жесткость гибкого колеса сравнительно с обычной зубчатой передачи.
Волновые передачи могут работать в качестве редуктора (КПД 80...90 %) и мультипликатора (КПД 60...70 %). В первом случае ведущим звеном является генератор волн, во втором – вал гибкого или жесткого колеса.
Передача винт-гайка качения
Передача винт-гайка качения (шарико-винтовая передача) предназначена для преобразования вращательного в поступательное движение, и наоборот, поступательного во вращательное движение (при обеспечении отсутствия самоторможения).
Она характеризуется высоким КПД (0,9...0,95), малым коэффициентом трения - качения, небольшим износом, высокой точностью хода, долговечностью, возможностью полного устранения зазоров, высокой чувствительностью к микроперемещениям, возможностью работы без смазки.
Недостатками передачи являются: достаточно сложная технология изготовления, высокая стоимость, пониженное демпфирование и необходимость защиты от пыли.
В винтовых шариковых парах между рабочими винтовыми по- верхностями винта и гайки (иногда вкладыша) помещены стальные шарики, как показано на рис. 2.7.
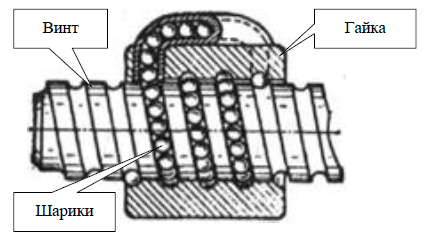
Рис. 2.7. Винтовая шариковая пара
Для обеспечения непрерывной циркуляции шариков концы рабочей части винтовой поверхности соединены возвратным каналом. Возвратный канал может представлять собой отверстие, просверленное в теле гайки и соединяющее начало первого витка с концом последнего витка резьбы (см. рис. 2.8), изогнутую трубку, концы которой вставлены в отверстия гайки, просверленные по касательной к поверхности резьбы, специальный вкладыш, который направляет шарики из впадин одного витка через выступ резьбы винта во впадину соседнего витка. Вкладыш вставляют в окно гайки. В большинстве случаев в гайке применяют 3, 4 или 6 окон, расположенных соответственно под углом 120, 90 или 60 градусов.

Рис. 2.8. Винтовые передачи фирмы THOMSON
Примером реализации винтовой передачи является электроцилиндр (Рис. 2.9).
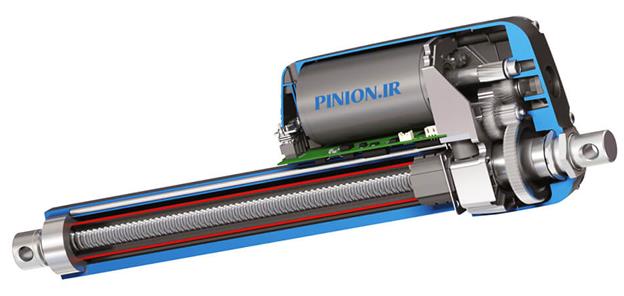
Рис. 2.9. Винтовая передача в электроцилиндре
Мехатронные модули движения
Мехатронный модуль движения (ММД) – конструктивно и функционально самостоятельное изделие, включающее в себя ме-ханическую (гидравлическую, пневматическую), электротехническую, электронную и информационную части, которое можно использовать индивидуально и в различных комбинациях с другими модулями. В отличие от модулей движения (МД) в мехатронных модулях движения (ММД) появились электронные и информационные устройства.
Мехатронные модули движения являются базовыми функциональными устройствами, из которых можно компоновать сложные мехатронные системы.
Примеры мехатронных модулей движения: мехатронные модули движения на основе электродвигателей углового и линейного движения и различных преобразователей движения (винтовых, червячных, планетарных и волновых), безредукторные мехатронные модули движения, безредукторные поворотные столы.
Мехатронный модуль движения состоит из следующих основных частей.
Электродвигатель – преобразователь электрической энергии в механическую.
Механический преобразователь – устройство, преобразующее параметры движения двигателя в требуемые параметры движения выходного звена (может отсутствовать).
В состав механического преобразователя входят:
• преобразователь движения (передача) - механизм, предназначенный для преобразования одного вида движения в другое, согласования скоростей и вращающих моментов двигателя и выходного звена мехатронного модуля;
• тормозное устройство – устройство, предназначенное для уменьшения скорости подвижного звена, останова и удержания его в неподвижном состоянии (может отсутствовать);
• люфтовыбирающий механизм – устройство, предназначенное для выборки зазора (мертвого хода) в некоторых видах преобразователей движения (может отсутствовать);
• направляющие – устройства, обеспечивающие заданное относительное движение выходного звена мехатронного модуля (может отсутствовать).
Информационное устройство – устройство, преобразующее контролируемую величину в сигнал, удобный для измерения, передачи, преобразования, хранения и регистрации, а, также для воздействия им на управляемые процессы.
На рис. 2.9 показана схема мехатронного поворотного стола, предназначенного для позиционирования или вращения по заданной программе закрепленной на планшайбе детали для проведения измерительных и разметочных операций или для обработки детали на металлорежущих станках сверлильно-фрезерно-расточной группы.
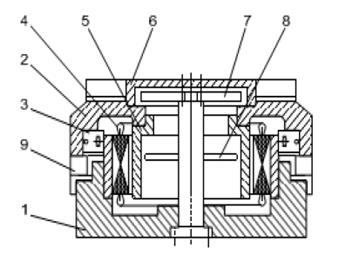
Рис. 2.9. Схема мехатронного поворотного стола
Мехатронный модуль состоит из основания 1 и собственно поворотного стола 2, опирающегося на упорные подшипники 3, встроенного бесконтактного трехфазного электродвигателя 4, ротор 5 которого скреплен с планшайбой 6, датчика 7 положения, датчика 8 скорости и гидротормоза 9, обеспечивающего фиксацию планшайбы в нужном положении. Безредукторное совмещение ротора электродвигателя и планшайбы позволяет полностью исключить люфт и соответственно увеличить точность позиционирования стола и расширить его технологические возможности. При этом упрощается конструкция стола, уменьшается число деталей, повышается жесткость.
Функциональная схема мехатронного поворотного стола представлена на рис. 2.10.
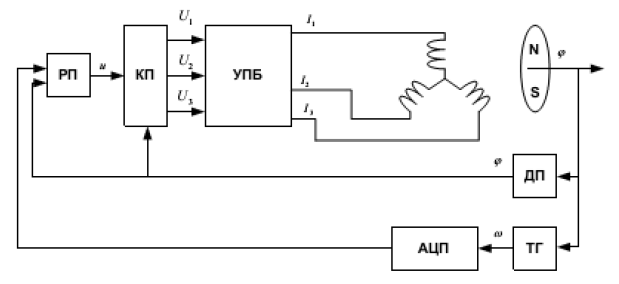
Рис. 2.10. Функциональная схема мехатронного поворотного стола
УПБ – усилительно-преобразовательный блок; КП – координатный преобразователь; РП – регулятор положения
Стол выполнен на основе трехфазного синхронного двигателя. На статоре расположены обмотки, а на роторе – постоянные магниты. Ось ротора связана с датчиком положения (ДП), определяющим угол поворота ротора φ. Дополнительно мехатронный поворотный стол снабжен: датчиками тока (в каждой фазе статорной обмотки), регуляторами фазовых токов, усилителем, тахогенератором (ТГ) и аналогово-цифровым преобразователем (АЦП). Датчики тока, регуляторы и усилитель объединены в единый усилительно-преобразовательный блок (УПБ).
Сигнал с ДП подается на вход координатного преобразователя (КП), на второй вход которого из регулятора положения (РП) поступает немодулированный сигнал управления u. Микропроцессорный КП вычисляет фазные напряжения U1, U2 и U3, меняющиеся по синусоидальному закону в функции электрического угла φэ = р φ (р – число пар полюсов) и сдвинутые относительно друг друга на 120 электрических градусов. Эти напряжения усиливаются по мощности в УПБ и прикладываются к обмоткам статора. Пе-ременные токи статора I1, I2 и I3 порождают пульсирующие магнитные поля, суперпозицией которых является вращающееся магнитное поле статора. В результате взаимодействия магнитных полей статора и ротора возникает вращающий момент, приводящий ротор в движение. При подаче постоянного входного сигнала u разгон двигателя осуществляется до тех пор, пока величины противо-ЭДС e1, e2 и e3 не уравновесят фазовые напряжения U1, U2 и U3.
Примеры мехатронных модулей движения
Примером использования передачи «винт-шариковая гайка» служит электрический линейный модуль движения (рис.2.11). Шариковая гайка преобразует вращательное движение винта в осевое перемещение каретки с минимальными потерями благодаря шарикам реализующим трение качения.
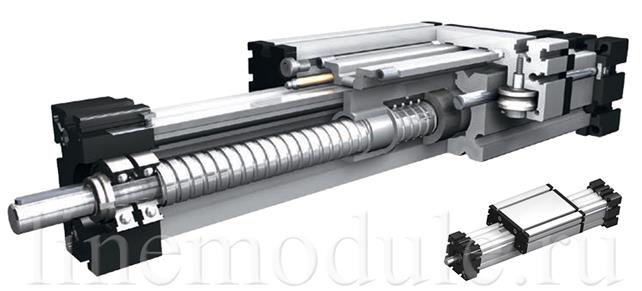
Рис.2.11. Линейный модуль движения
Преимущества:
ü Высокая точность позиционирования;
ü Плавное перемещение;
ü Высокие усилия;
ü Высокая жесткость;
ü Повторяемость: ± 10 мкм;
ü Средняя цикличность;
ü Самотормозящаяся передача;
ü Возможность выбора направляющих скольжения или качения;
ü Продолжительный срок службы, составляющий до 20 миллионов циклов.
В настоящее время широкое применение находят электроцилиндры.
Большие усилия, высокая точность позиционирования и легкость электронного управления их главные преимущества.

Рис.2.12 Линейный модуль движения - Электроцилиндр фирмы Фесто
Линейный привод с зубчатым ремнем - это оптимальное по стоимости решение.
Идеальный вариант для применений и задач с невысокими требованиями в плане механической нагрузки, динамики отклика и точности.

Рис. 13. Привод с зубчатым ремнем с шариковой линейной направляющей EGC-TB-KF фирмы Фесто
Преимущества:
ü Высокая скорость: до 10 м/с;
ü Большой ход;
ü Высокая цикличность;
ü Повторяемость ± 50 мкм;
ü Минимальный уровень шума;
ü Встроенная система смазки на 10 000 км работы, исключающая необходимость обслуживания4
ü Низкая стоимость.
В поворотном приводе используются планетарные, волновые или другие типы редукторов.
Зубчатое зацепление идеальный вариант для применений и задач с высокими требованиями в плане механической нагрузки, динамики отклика и точности.

Рис. 2.14. Поворотный модуль
Ярким примером комбинированной передачи «винт-шариковая гайка» и ременной передачи служит электрический усилитель рулевого управления автомобиля. Электродвигатель постоянного тока (рис.2.15) на выходном валу которого насажена шестерня 3 приводит в действие через зубчатый ремень 2 ведомую шестерню 4 с шариковой гайкой 5. Шариковая гайка преобразует вращательное движение в осевое перемещение винта 1 с минимальными потерями благодаря шарикам 7 реализующим трение качения.
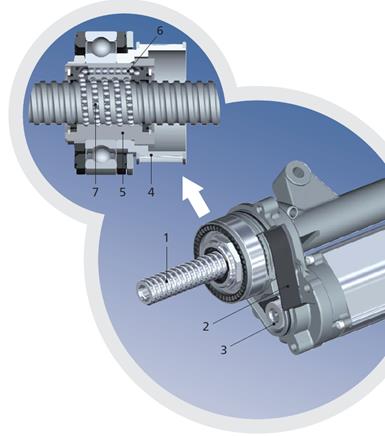
Рис.2.15. Ременная передача и передача «винт – шариковая гайка» электроусилителя ZF-Servolectric®
План работы
1. Определить передаточное отношение: реечной передачи, червячного редуктора и планетарной передачи.
2.
Контрольные вопросы
1. Конструктивные особенности реечных передач.
2. Какие основные преимущества шарико-винтовых передач?
3. Приведите примеры мехатронных модулей с шарико-винтовыми передачами.
4. Приведите примеры мехатронных модулей использующих привод с зубчатым ремнем.
Список литературы
1. Подураев Ю.В. Мехатроника: основы, методы, применение: учеб. пособие для студентов вузов. – М.:Машиностроение, 2006. – 256 с.
2. Подураев Ю.В. Основы мехатроники: Учебное пособие. – М.: МГТУ «Станкин», 2000 – 80 с.
3. Хомченко В. Г. Мехатронные и робототехнические системы: учеб. пособие / В. Г. Хомченко, В. Ю. Соломин. – Омск: Изд-во ОмГТУ, 2008. – 160 с.
Дата добавления: 2021-02-10; просмотров: 2797; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!