ПРОЕКТИРОВАНИЕ ПРИВОДА ЛЕНТОЧНОГО КОНВЕЙЕРА
(ВАРИАНТ 5)
Исполнитель:
студент группы 9802
Иванов
Иван Иванович
Руководитель:
кандидат экономических наук,
доцент
Некрасов
Алексей Владимирович
 |
Отметка
(подпись)
Нижневартовск, 2020
РЕФЕРАТ
Объем работы 16 страниц, она содержит 7 рисунков, 3 таблицы, 26 формул.
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА , РАЗГОН, ТОРМОЖЕНИЕ, СИСТЕМА УПРАВЛЕНИЯ, КОММУТАЦИЯ, ДОПОЛНИТЕЛЬНЫЕ РЕЗИСТОРЫ, СЕМИСТОРЫ, МИКРОПРОЦЕССОР, ТОК ЯКОРЯ.
В работе рассматривался автоматизированный пуск двигателя постоянного тока при условии ограничения тока якоря. Исходя из упрощенной модели процесса было рассчитано сопротивление пусковых резисторов, время этапов пуска и угловые скорости якоря на соответствующих этапах. Результаты расчетов были проверены математическим моделированием, исходя из более полной модели объекта. Разработана принципиальная электрическая схема системы автоматического управления пуском.
1. ВВЕДЕНИЕ И ПОСТАНОВКА ЗАДАЧИ
Двигатели постоянного тока независимого возбуждения наиболее часто используются в системах автоматики так как они очень просты в управлении и имеют привлекательные с точки зрения разработчика механические характеристики. Однако при подключении двигателей постоянного тока средней и большой мощности к источнику питания могут возникнуть проблемы, так как в момент включения ток якоря ограничивается только активным сопротивлением якоря. Сопротивление якоря двигателя довольно мало, поэтому ток в момент включения достигает очень больших значений и может вывести из строя сеть, источник питания, да и сам двигатель.
|
|
|
В самом деле, с достаточно высокой точностью математическую содель двигателя постоянного тока можно представить в виде [ 4 ]:
 (1)
(1)
где  - индуктивность якоря;
- индуктивность якоря;  - ток якоря;
- ток якоря;  - активное сопротивление цепи якоря;
- активное сопротивление цепи якоря;  - угловая скорость якоря;
- угловая скорость якоря;  - приведенный момент инерции якоря;
- приведенный момент инерции якоря;  - момент трения в коллекторе и подшипниках;
- момент трения в коллекторе и подшипниках;  - момент нагрузки;
- момент нагрузки;  - постоянные коэффициенты, определяемые конструкцией данного двигателя; U – питающее напряжение.
- постоянные коэффициенты, определяемые конструкцией данного двигателя; U – питающее напряжение.
Моменты трения с достаточной точностью можно считать изменяющимся по закону:
 (3)
(3)
Момент нагрузки, в принципе может изменяться по любому закону, но в данном случае этот закон примем в виде:
 (2)
(2)
Первое уравнение системы (1) описывает динамику электромагнитных процессов в двигателе, второе – электромеханические. В уравнениях (1) это приводит к тому, что правая часть второго уравнения будет отлична от нуля только, если выполняется условие:
|
|
|
 . (4)
. (4)
Коэффициенты имеют совершенно различную размерность, но обычно они очень близки по модулю, поэтому в дальнейшем будем называть их единым электромагнитным коэффициентом и обозначать  .
.
Так как электромагнитные процессы в якоре протекают на порядок быстрее электромеханических, то при включении двигателя в сеть через очень короткий промежуток времени  , а угловая скорость не успеет увеличиться и
, а угловая скорость не успеет увеличиться и  . Поэтому в первый момент после включения ток якоря будет определяться выражением:
. Поэтому в первый момент после включения ток якоря будет определяться выражением:
 . (5)
. (5)
Естественно, если  - активному сопротивлению якоря, которое очень мало, то ток может достигать очень больших значений. Поэтому при запуске двигателей постоянного тока средней и большой мощности последовательно с якорем подключают один или несколько резистров, последовательно отключая их при достижении якорем определенных оборотов. То есть
- активному сопротивлению якоря, которое очень мало, то ток может достигать очень больших значений. Поэтому при запуске двигателей постоянного тока средней и большой мощности последовательно с якорем подключают один или несколько резистров, последовательно отключая их при достижении якорем определенных оборотов. То есть
 . (6)
. (6)
Для этого применяют схему, которую обобщенно можно представить, как показано на рис. 1.
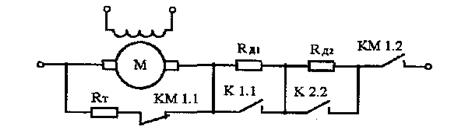
Рис. 1. Часть принципиальной электрической схемы
|
|
|
пуска и динамического торможения двигателя постоянного тока
В настоящее время в качестве контактов К1.1 и К1.2 применяются электронные элемент, в частности семисторы, а управление ими осуществляется с помощью микропроцессоров. Резистор  , и контакт КМ1.1 используются для ограничения тока при динамическом торможении двигателя.
, и контакт КМ1.1 используются для ограничения тока при динамическом торможении двигателя.
Цель работы:
1. Рассчитать количество и сопротивление дополнительных резисторов включаемых в цепь якоря при разгоне и торможении, исходя из выполнения условия:
 , (7)
, (7)
где  - ток якоря при номинальном моменте нагрузки.
- ток якоря при номинальном моменте нагрузки.
2. Рассчитать параметры переходных процессов пуска и торможения, используя упрощенную математическую модель двигателя.
3. Проверить параметры переходных процессов методом математического моделирования на ЭВМ.
4. Разработать обобщенную электрическую принципиальную схему системы управления пуском двигателя и описать ее работу.
Исходные данные:
Таблица 1.
| № варианта | Тип двигателя | Номинальная мощность навалу, Вт | Номинальное напряжение, В | Номинальный ток якоря, А | Номинальная частота вращения, об/мин | Сопротивление якоря, Ом | Индуктивность якоря, ·10-3, Гн | Момент инерции якоря, 10-3, кг/м2 | Отношение момента сопротивления к моменту нагрузки, % | Схема управления |

| 
|
| 
| 
| L | J | α | |||
| 30 | МИ-32 | 450 | 110 | 5,0 | 1500 | 0,605 | 4,5 | 13,25 | 55 | Т |
|
|
|
2. РАСЧЕТ ДОПОЛНИТЕЛЬНЫХ РЕЗИСТОРОВ
По исходным данным определяют ряд величин, которые используются в дальнейшем расчете:
4. Номинальная угловая скорость вращения
 =
=  n H = 157
n H = 157  .
.
5. Единый электромагнитный коэффициент
 эм =
эм =  = 0,681
= 0,681 
3. Номинальный электромагнитный момент
Мн = k ЭМ I ЯН = 3,4 
4. Номинальный момент на валу двигателя
 М2Н =
М2Н =  = 2,87
= 2,87
5. Момент потерь
М0 = М Н - М 2Н = 0,54
6. Полный момент сопротивления
Мс =  =2,12
=2,12
7. Ток якоря, соответствующий моменту сопротивления Мс
 =
=  = 3,11
= 3,11 
8. Угловая скорость вращения двигателя при токе 
 = 158,68
= 158,68  .
.
Рассчитаем число степеней пуска.
Эта величина определяется максимальным и минимальным токами (I 1 , I 2) при замыкании накоротко пусковых резисторов. Согласно [3, 5]:
I 1 =3·I ЯН =15,0 [A], (8)
I 2 =1,2·I с =3,73 [A] (9)
При аналитическом расчете число ступеней m определяется соотношением [3, 5]:
m = (lnIn/I1)/(lnI1/I2), (10)
где In - величина максимального пускового тока при отсутствии добавочных резисторов
 = 181,82 [A]. (11)
= 181,82 [A]. (11)
Подставляя в (10) численные значения параметров, получим
m= 1,80
Округлим найденное значений m в большую сторону до целой величины, получим:
m= 2
Следовательно, система управления пуском будет содержать два дополнительных резистора.
На первой ступени:
R Я1 = R + R Д1 , (12)
где добавочное сопротивление R Д1 определяется так:
R Д1 =  =1,83 [Ом].
=1,83 [Ом].
Соответственно
R Я1 =2,43 [Ом].
На второй ступени
R Я2 = R + R Д1 + R Д2 (7)
где
R Д2 =  ( R + R Д1 )=7,36 [Ом].
( R + R Д1 )=7,36 [Ом].
Соответственно
R Я2 =9,79 [Ом].
При определении сопротивления резистора для динамического торможения R Т исходят из того, что максимальный ток при динамическом торможении не должен превосходить по величине ток I 1 .
Поэтому
 =6,60 [Ом] (10)
=6,60 [Ом] (10)
3. УПРОЩЕННЫЙ РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПРИ ПУСКЕ И ДИНАМИЧЕСКОМ ТОРМОЖЕНИИ
При упрощенном расчете будем использовать упрощенную математическую модель переходного процесса, в которой предполагается, что электромагнитные переходные процессы быстро заканчиваются и не влияют на электромеханический ]5]:
 , (11)
, (11)
где
Tmi = R я i J / k 2 эм (12)
Электромеханическая постоянная времени двигателя на i-ом шаге разгона.
На первом этапе разгона этапе разгона будем иметь
Tm 1 =( R я+ R Д1 + R Д2 ) J / k 2 эм=0,28 [с]. (13)
На втором этапе разгона этапе разгона будем иметь
Tm 2 =( R я+ R Д1 ) J / k 2 эм=0,07 [с]. (14)
На завершающем этапе разгона будем иметь
Tm 0 = R я J / k 2 эм=0,017 [с]. (15)
Решение уравнения (11) имеет вид:
i я = I у i  + I нач I
+ I нач I 
где I нач i - начальное значение тока на i -й ступени. В данном случае для всех ступеней
I у i = Ic I нач i = I 1
Этому для каждой ступени ток iяi определяется уравнением (16)
i я i = I с  + I 1
+ I 1  (16)
(16)
На основании (16) время tui , в течение которого ток в якоре уменьшается на i -й ступени, определяется так:
tui = Т mi ln  . (17)
. (17)
Тогда на первой стадии разгона:
tu 1 = Т m 1 ln =0,82 [с]. . (18)
Тогда на второй стадии разгона:
tu 2 = Т m 2 ln =0,21 [с]. . (19)
При пуске двигателя по естественной характеристике
T ио  3Тмо=0,05 [с], , где Тмо = RJ / k 2 эм
3Тмо=0,05 [с], , где Тмо = RJ / k 2 эм
Здесь ток якоря уменьшается от I 1, до Ic .
Для исследования переходных процессов по скорости будем использовать упрощенную математическую модель [5]:
T м i 
 =
=  у i (20)
у i (20)
где  у i – установившаяся частота вращения двигателя на i -й ступени. Решение этого уравнения имеет вид:
у i – установившаяся частота вращения двигателя на i -й ступени. Решение этого уравнения имеет вид:
= уi + нач i  (21)
(21)
где нач i - начальная частота вращения на i -й ступени.
Каждой ступени при определении соответствует не только свое значение T м i, но и свои значения начальной и установившейся величин частоты вращения ( нач i , у i ).
На первом этапе пуска
нач 2 = 0; у2 = с2 , где с2 =  = 143,96 [1/с] .
= 143,96 [1/с] .
На втором этапе пуска
нач 1 = у2 = 143,96 [1/с].
Конечная скорость на втором этапе
у1 = с1 =  =154,76 [1/с].
=154,76 [1/с].
где величина R Я1 определяется уравнением (6).
При пуске по естественной характеристике (нулевая ступень):
нач 0 = у1 = 154,76 [1/с].
Рассмотрим теперь переходные процессы в режиме динамического торможения. Для реализации этого режима якорь двигателя отключается от сети и замыкается на резистор RT, а обмотка возбуждения остается под напряжением, Если считать, что индуктивность якорной обмотки равна 0, то при этом переключении ток в якорной цепи скачком изменяется от IС до I Т (рис. 2), где I Т - величина отрицательная. Рабочая точка перемещается с естественной характеристики 1 на характеристику динамического торможения 2. Далее величины i я и уменьшаются до нуля. Если бы после достижения равенства = 0 момент сопротивления не изменил своего знака и оставался постоянным по модулю, то двигатель изменил бы направление вращения и достиг частоты т при токе i я = ic ,
где т =  (22)
(22)
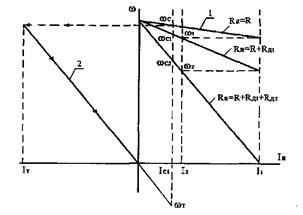
Рис. 2. Скоростные характеристики двигателя постоянного тока
Однако, после достижения частоты вращения = 0 момент сопротивления меняет свой знак т.е. двигатель останавливается. Ранее указывалось, что при выполнении этой курсовой работы момент нагрузки представляет собой момент сухого трения. Для определения тока якоря во время динамического торможения можно воспользоваться уравнением (15), приняв:
I у i = Iс ; I нач = I Т
При этом получим:
i я = Ic (1 – е- t / T mg) + I Т е- t / T mg (23)
где Т m д =  ; R ят = R Т + R .
; R ят = R Т + R .
Для определения изменения в процессе динамического торможения можно использовать уравнение (20), приняв
уi = T; нач i = c
При этом получаем
 = T(1 – е- t / T mg) + c е- t / T mg (24)
= T(1 – е- t / T mg) + c е- t / T mg (24)
Уравнения (23), (24) справедливы до достижения = 0.
Учитывая, что в конце динамического торможения = 0, на основании (24) можно определить время динамического торможения
t T = Т m д ln  , (25)
, (25)
где T - величина отрицательная.
Для нашего случая будем иметь:
т = = -30,11 [1/с]. ; R ят = R Т + R Я= 7,2 [Ом]. ; Т m д = = 0,21 [c].
t T = Т m д ln = 0,38 [c]. .
Результаты расчетов сведены в табл. 2
Таблица 2
Анализ основных параметров
| Ступень | R Д i | T м i | ti | нач i
| у i
|
| 2 1 0 Динамич. торможение | 7,36 1,83 0 6,60 | 0,28 0,07 0,017 0,21 | 0,82 0,21 0,05 0,38 | 0 143,96 154,76 158,68 | 143,96 154,76 158,68 0 |
4. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ НА ЭВМ
Моделирование динамики разгона и торможения двигателя постоянного тока производилось с использованием полной модели (1) и программы «Разгон», созданной в среде MatLab. На рис.3, рис.4 приведены экранные формы программы и результаты моделирования.
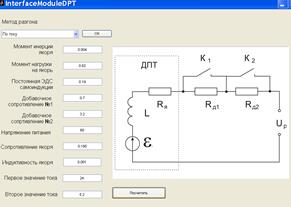
Рис. 3. Экранная форма программы «Разгон»
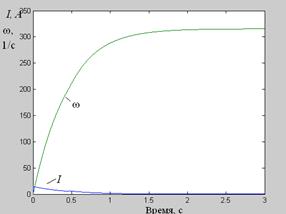
Рис. 4. Графики переходных процессов по току и скорости при разгоне
Из результатов моделирования следует, что теоретически рассчитанные параметры процесса разгона совершенно не соответствуют полученным при моделировании на более полной модели. Это объясняется крайне неудачной методикой выбора сопротивления резисторов.
В режиме торможения математическая модель (1) приобретает вид:
 (26)
(26)
Или в матричной форме
 , (27)
, (27)
где  .
.
Для моделирования использовался математический инструментарий simulink. Структура модели программы приведена на рис. , Окно модели и полученные графики переходных процессов приведены на рис. . Как уже было сказано, эти графики справедливы только до момента пересечения ими оси абсцисс.
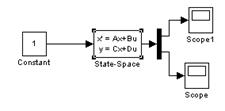
Рис. 5. Структура модели программы
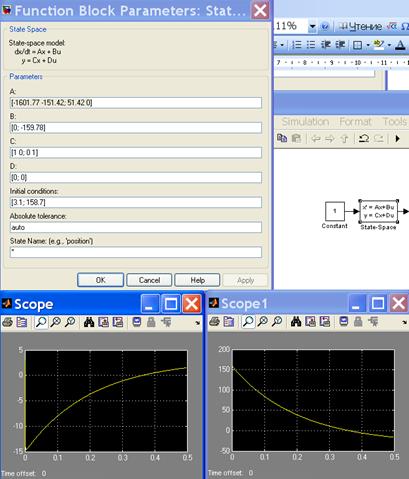
Рис. 6. Окно параметров модели и графики переходных процессов по току и скорости при торможении, полученные в результате моделирования
Из результатов моделирования следует, что теоретически рассчитанные параметры процесса торможения с точностью до ±10% соответствуют полученным при моделировании на более полной модели.
5. РАЗРАБОТКА ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ СХЕМЫ
Система автоматического управления пуском двигателя постоянного тока состоит из силовой части, включающей резисторы R1, R2 и системы управления ими, включающей резистор R4, транзисторы VT1, VT2 и микропроцессор М, импульсный датчик ИД. Сопротивление резистора R4 выбирается на порядок меньше сопротивления обмотки якоря, поэтому он не влияет на разгонные характеристики двигателя, но падение напряжения на нем пропорционально току якоря. Поэтому этот резистор может играть роль датчика тока якоря.
Система может управлять пуском двигателя как по току, по времени и по скорости. В первом случае при замыкании пусковой кнопки К1, микропроцессор начинает измерять ток якоря, снимаемый с резистора R4. при достижении тока I1, микропроцессор подает сигнал, включающий оптрон семистора S2 через усилитель мощности на транзиcторе VT2, который замыкает резистор R2. При повторном достижением тока якоря значения I1, микропроцессор замыкает симистор S1. На этом процедура разгона заканчивается.
Во втором случае при замыкании кнопки К1 процессор начинает отсчитывать время и по достижении необходимых моментов последовательно включает семисторы S2, S1.
Во втором случае при угловая скоротсь вращения двигателя измеряется импульсным датчиком ИД. Процессор обрабатывает информацию, и при достижении необходимой скорости последовательно включает семисторы S2, S1.
Вид работы системы определяется программой процессора.
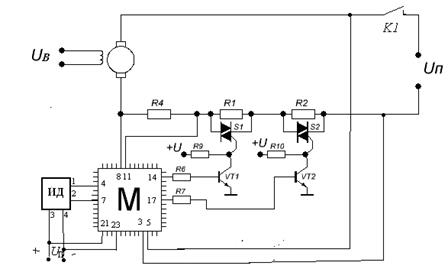
Рис. 7. Электрическая принципиальная схема системы управления
Спецификация к электрической принципиальной схеме Таблица 3
| Спецификация | ||
| Обозначение на схеме | Номинал | Тип |
| R1 | ||
| R2 | ||
| R4 | ||
| R5 | ||
| R6 | 10 КОм | |
| R7 | 10 КОм | |
| R8 | 10 КОм | |
| R9 | 200 Ом | |
| R10 | 200 Ом | |
| VT1 | 2Т312А | |
| VT2 | 2Т312А | |
| S1 | BTB24-600BWRG | |
| S2 | BTB24-600BWRG | |
| M | Микропроцессор, MQWM 356728GD | |
| ИД | Импульсный датчик угловой скорости ИДМ-256 А | |
ВЫВОДЫ
1. Рассчитаны дополнительные резисторы, обеспечивающие пуск и торможение двигателя постоянного тока из условия ограничения пускового тока.
2. Произведен расчет параметров пускового процесса по времени и скорости, исходя из упрощенной модели.
3. Параметры переходного процесса проверены методом математического моделирования на более полной модели, они показали совпадение с расчетными с точностью ±10% при торможении и полное несовпадение при разгоне.
4. Разработана электрическая принципиальная схема автоматизированной системы управления пуском.
Литература
1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. –М.: Высшая школа, 1986.-335с.
2. Васильев Д.В. и др. Проектирование и расчет следящих систем. - Л.: Судостроение, 1964.-396с.
3. Москаленко В.В. Автоматизированный электропривод. - М.: Энергоатомиздат, 1986.-320с.
4. Брускин Д.Э., Зорохович А.Е., Хвостов А.С. Электрические машины и микромашины. М.: Высшая школа, 1971.- 430 с.
5. Фомин А.И., Барцева Л.А. Автоматизация управления двигателем постоянного токаю Метод. указ.. Саратов.: СГТУ, 2000. -17 с.
Дата добавления: 2021-02-10; просмотров: 90; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!