РАЗБОРКА И ИЗУЧЕНИЕ РЕДУКТОРОВ
ЛАБОРАТОРНАЯ РАБОТА № 1
СТРУКТУРА И ПЕРЕДАТОЧНАЯ ФУНКЦИЯ МЕХАНИЗМОВ
Цель работы - знакомство с составлением кинематической схемы многозвенного механизма и с построением графика его передаточной функции.
Оборудование и приборы
• Модель механизма.
• Измерительный инструмент: линейка с миллиметровой шкалой, циркуль, транспортир.
Основные теоретические положения
“ Кинематическая пара соединение двух непосредственно соприкасающихся звеньев; соединение должно допускать движение одного звена относительно другого.
Элементами кинематической пары являются поверхности, линии или точки, по которым соприкасаются звенья. Кинематические пары, элементами которых являются поверхности, называются низшими, остальные – высшими.
Кинематическая схема механизма представляет собой чертеж изучаемого механизма, выполненный в масштабе и в условиях, обозначенных по ГОСТ 2770-68.
“ Кинематическая схема - это "скелет" механизма или машины; на ней не должно быть лишних конструктивных деталей, которые не нужны для кинематического исследования механизма и которые лишь усложнили бы чертеж.
На рис.1.1 и 1.2 представлены конструктивная и кинематическая схема насоса.

Рисунок 1.1

Рисунок 1.2
На рис.1.2 показаны размеры, которые должны быть известны для построения кинематической схемы механизма. Для кинематического исследования механизмов необходимо также определить размеры звеньев, замеряемые между центрами кинематических пар А, В, С, F и т.д.
|
|
|
Условные обозначения для кинематических схем, установленные ГОСТом 2770-68, приводятся в таблице 1.
Таблица 1
| Наименование | Обозначение |
| Вал, ось, стержень, шатун | 
|
| Неподвижное звено (стойка) | 
|
| Неподвижное соединение детали с валом, стержнем | 
|
| Кинематическая пара (вращательная) | 
|
| Кинематическая пара (поступательная) |

|
| Кинематическая пара (винтовая) | 
|
| Кинематическая пара (цилиндрическая) | 
|
| Кинематическая пара (сферическая) |

|
| Радиальные подшипники качения |

|
| Муфта. Общее обозначение без уточнения типа |

|
| Упругая муфта |

|
| Ползун |

|
| Передача ременная без уточнения типа ремня | 
|
| Передача цепью без уточнения типа цепи |

|
| Зубчатая передача (цилиндрическая, без уточнения типа зубьев) | 
|
| Червячные передачи с цилиндрическим червяком | 
|
Порядок составления кинематической схемы
1. Имея перед собой модель механизма, необходимо понять характер относительного движения его звеньев, для чего механизм надо медленно поворачивать за ведущее звено и наблюдать за характером движения остальных звеньев.
|
|
|
2. При наблюдении за относительным движением звеньев установить, какими кинематическими парами они соединены (высшими, низшими, вращательными или поступательными).
3. Определив размеры всех звеньев, надо выбрать масштаб построения кинематической схемы в соответствии с форматом бланка отчета. Построение схемы рекомендуется выполнять по возможности в натуральную величину (М 1:1). При уменьшении необходимо выбирать следующие масштабы 1:2; 1:2,5; 1:4; 1:10.
Для пользования уже построенной кинематической схемой применяют вычислительный масштаб, который является отношением действительной длины  звена 2 (рис. 1.2) в метрах к отрезку АВ, изображающему это звено на чертеже в миллиметрах.
звена 2 (рис. 1.2) в метрах к отрезку АВ, изображающему это звено на чертеже в миллиметрах.
 .
.
4. После выбора масштаба наметить на листе бумаги положение всех базовых кинематических пар и линий (на рис.1.2 это точки А, Е, Н и линия GF), показав расстояние между ними на чертеже в мм. За начало координат системы базовых точек принять центр вращения ведущего звена, точку А кривошипа (рис. 1.1).
5. Вычертить одно из положений ведущего звена, при котором хорошо видны остальные звенья (без наложения одного звена на другое). Показать стрелкой направление движения ведущего звена.
|
|
|
6. Вычертить в том же масштабе кинематическую цепь, образованную ведущим и ведомыми звеньями механизма.
7. Пронумеровать звенья на кинематической схеме арабскими цифрами в порядке их присоединения к ведущему звену; кинематические пары обозначить прописными буквами латинского алфавита в том же порядке.
Написать масштаб чертежа и заполнить в качестве паспортных данных таблицу размеров звеньев в последовательности.
8. Заполнить таблицу кинематических пар.
9. Подсчитать число степеней свободы (подвижности) механизма по формуле П.Л.Чебышева:
 ,
,
где  - число подвижных звеньев,
- число подвижных звеньев,  - число пар V класса (низших),
- число пар V класса (низших),
 - число пар IV класса (высших).
- число пар IV класса (высших).
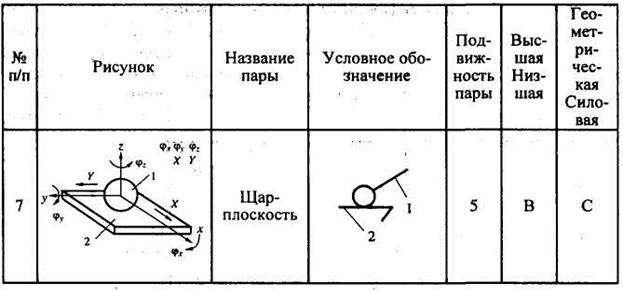
Классификация кинематических пар приведена в таблице 2.
Таблица 2

Продолжение таблицы 2
Контрольные вопросы
1. Что называется механизмом? Что называется кинематической схемой?
2. Что называется звеном механизма?
3. Какое звено механизма называется входным (выходным)?
4. Что называется кинематической парой?
5. Как определить число степеней свободы плоского механизма?
6. Какие кинематические пары называются высшими?
7. Какие кинематические пары относятся к низшим кинематическим парам?
|
|
|
ЛАБОРАТОРНАЯ РАБОТА № 2
РАЗБОРКА И ИЗУЧЕНИЕ РЕДУКТОРОВ
Цель работы
Основными целями работы являются следующие:
1.1. Ознакомление с кинематическими схемами и техническими характеристиками (основными параметрами) конического, червячного и многоступенчатых цилиндрических зубчатых редукторов.
1.2. Ознакомление с конструкцией и назначением отдельных частей и элементов редукторов путем их разборки, осмотра и изучения рекомендуемой литературы.
1.3. Определение общих передаточных отношений редукторов и их ступеней с округлением по соответствующему ГОСТу.
1.4. Измерение межосевых расстояний отдельных ступеней цилиндрических зубчатых редукторов (внешних делительных диаметров конических колес в коническом редукторе) и округление их до ближайших стандартных.
1.5. Измерение габаритных присоединительных, расчетных и справочных размеров одного из редукторов и простановка их на общем виде редуктора на бланке отчета по лабораторной работе.
1.6. Определение теоретических значений КПД редукторов.
1.7. Разработка эскизного чертежа и спецификации к нему одного из сборочных узлов редуктора (по указанию преподавателя) с простановкой на нем габаритных, посадочных и справочных размеров.
Оборудование и инструмент
2.1. Макеты одноступенчатых червячного, конического и многоступенчатых цилиндрических зубчатых редукторов.
2.2. Набор ключей и отверток.
2.3. Линейка и штангенциркуль.
2.4. Плакаты и альбом типовых конструкций редукторов.
Теоретическая часть
Редуктором называют механизм, состоящий из зубчатых или червячных колес (или тех и других вместе), выполненный в виде отдельного агрегата и служащий для понижения угловой скорости и увеличения вращающего момента в приводах от двигателя к рабочей машине.
Дата добавления: 2021-01-21; просмотров: 124; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!