РЕЛЕЙНОЕ УПРАВЛЕНИЕ ПО ИЗМЕРЕНИЮ ОТКЛОНЕНИЯ ОТ ВЕРТИКАЛИ
Федеральное государственное бюджетное образовательное
учреждение высшего образования
«Национальный исследовательский университет «МЭИ»
| Институт энергомашиностроения и механики | Кафедра робототехники, мехатроники, динамики и прочности машин |
| Направление подготовки: | Мехатроника и робототехника |
ОТЧЕТ по практике
| Наименование практики: | Производственная практика: научно-исследовательская работа |
СТУДЕНТ
| / / | |
| (подпись ) | (Фамилия и инициалы) |
| Группа | С-12-17, С-12А-17 |
| (номер учебной группы) |
ПРОМЕЖУТОЧНАЯ АТТЕСТАЦИЯ ПО ПРАКТИКЕ
| (отлично, хорошо, удовлетворительно, неудовлетворительно, зачтено, не зачтено) |
| /Меркурьев И.В./ | |
| (подпись ) | (Фамилия и инициалы члена комиссии) |
| /Комерзан Е.В./ | |
| (подпись ) | (Фамилия и инициалы члена комиссии) |
| /Астахов С.В./ | |
| (подпись ) | (Фамилия и инициалы члена комиссии) |
Москва
2020
Отчет о НИР может содержать следующие разделы
1. Анализ научно-технической информации, отечественного и зарубежного опыта в области разработки и исследования мехатронных и робототехнических систем;
2. Проведение теоретических и экспериментальных исследований с целью исследования, разработки новых образцов и совершенствования существующих мехатронных и робототехнических систем, их модулей и подсистем;
|
|
|
3. Проведение патентных исследований, сопровождающих разработку новых мехатронных и робототехнических систем, с целью защиты объектов интеллектуальной собственности, результатов исследований и разработок;
Описание объекта работы
Определение вида объекта и проверка соблюдения требования единства изобретения.
Выбор названия изобретения
Определения индекса МКИ
Регламент поиска
Результаты поиска
Отбор аналогов для сопоставительного анализа
Сопоставительный анализ ИТР с аналогами и выбор прототипа.
Доказательства охраноспособности ИТР
Составление формулы изобретения.
Заявка на выдачу патента на изобретение (свидетельства на полезную модель).
4. Разработка математических моделей роботов, мехатронных и робототехнических систем, их отдельных подсистем и модулей, проведение их исследования с помощью математического моделирования, с применением как специальных, так и универсальных программных средств, с целью обоснования принятых теоретических и конструктивных решений;
|
|
|
5. Участие в работах по организации и проведению экспериментов на действующих объектах и экспериментальных макетах мехатронных и робототехнических систем, их подсистем и отдельных модулей, обработка результатов экспериментальных исследований с применением современных информационных технологий;
6. Участие в составе коллектива исполнителей в проведении теоретических и экспериментальных исследований с целью исследования, разработки новых образцов и совершенствования существующих модулей и подсистем мехатронных и робототехнических систем;
7. Перечень научных публикаций и докладов на научных конференциях и семинарах, участие во внедрении результатов исследований и разработок.
Отчетные материалы необходимо загрузить в БАРС.
Объем отчета до 5 Мб (5-8 стр.)
Видео-инструкции расположены на странице:
https://mpei.ru/structure/uchchast/icc/ddiisas/pages/bars.aspx
Отчеты о НИР могут быть проверены в системе Антиплагиат.
Правила оформления отчета о научно-исследовательской работе должны быть близкими к ГОСТ 7.32-2017 http://docs.cntd.ru/document/1200157208
Для проведения обзора литературы можно зарегистрироваться в электронной научной библиотеке https://www.elibrary.ru/defaultx.asp
|
|
|
Пример отчета по теме
РАЗРАБОТКА АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТА ТИПА СЕГВЕЙ
Рассматривается плоское движение балансирующего робота типа Сегвей в виде платформы, шарнирно закреплённой на колёсной паре. Управляющий момент электродвигателя ограничен по абсолютной величине. Обсуждается решение задачи построения системы автоматического управления движением робота для стабилизации вертикального неустойчивого положения платформы. Проведен анализ фазовых портретов замкнутой системы управления. Проведена оценка точности стабилизации заданного положения робота.
ВВЕДЕНИЕ
Актуальность исследований робототехнических систем связана с увеличивающимся числом приложений роботов в различных сферах деятельности человека. В настоящее время приобрели популярность моноциклы (одноколесное моторизованное транспортное средство), гироскутеры и Сегвеи в виде колесной пары, обеспечивающие стабилизацию движения пассажира. Управлению и стабилизации маятниковых систем посвящено множество публикаций. В качестве примера можно привести работы по стабилизации движения многозвенного механизма на колесе [1], перевернутого маятника Капицы [2], мобильных роботов [3].
|
|
|
Основной сложностью построения управления движением для принципиально неустойчивого объекта в виде колесной пары и вертикальной платформы является учет ограничений на управляющее воздействие, случайных помех на входе системы при движении в изменяющихся условиях функционирования, а также парирование погрешностей в измерениях компонент вектора состояния системы. Учитывая, что движение системы реализуется благодаря сухому трению в пятне контакта колесной пары с подстилающей поверхностью, интересным представляются вопросы стабилизации объекта на гладкой скользкой поверхности.
ПОСТАНОВКА ЗАДАЧИ
В целях повышения точности стабилизации вертикального неустойчивого положения платформы поставим задачу построения релейного и пропорционально-интегрально-дифференциального управления мобильным роботом по сигналам датчиков инерциальной и внешней информации, установленных на борту макетного образца робота на базе элементов и датчиков конструктора Лего (рис. 1).
УРАВНЕНИЯ ДВИЖЕНИЯ
Кинематическая схема робота в случае движения в плоскости представляет собой колесо радиуса R, которое может катиться без скольжения по горизонтальной прямой, и маятника, шарнирно закрепленного на нём (рис. 2). Движение маятника происходит в той же вертикальной плоскости, в которой перемещается колесо.

| 
|
| Рис. 1. Модель робота типа Сегвей | Рис. 2. Кинематическая схема робота |
Для построения математической модели системы введем обобщенные координаты α и β, где α – угол поворота колеса, β – отклонение робота от вертикали. С использованием формализма Лагранжа получим систему нелинейных дифференциальных уравнений четвертого порядка. Учитывая, что координата α является циклической, управляемое движение системы в малой окрестности вертикального положения платформы имеет вид [1]:
 (1)
(1)
где штрихом обозначено дифференцирование по безразмерному времени  :
:
 ,
,  ,
,  ,
,  ,
,
здесь  – ускорение свободного падения,
– ускорение свободного падения,  – расстояние до центра масс маятника,
– расстояние до центра масс маятника,  – радиус инерции маятника,
– радиус инерции маятника,  – масса маятника,
– масса маятника,  – масса колеса,
– масса колеса,  – радиус инерции колеса,
– радиус инерции колеса,  – размерное время. В уравнении (1) введены обозначения, аналогичные работе [1] и, учитывая малый масштаб времени стабилизации системы, диссипативные слагаемые в уравнении (1) не учитываются.
– размерное время. В уравнении (1) введены обозначения, аналогичные работе [1] и, учитывая малый масштаб времени стабилизации системы, диссипативные слагаемые в уравнении (1) не учитываются.
Предполагая, что момент электродвигателя линейно зависит от протекающего в нём тока, можно записать  ,
,  – активное сопротивление электродвигателя,
– активное сопротивление электродвигателя,  – постоянная момента. Требуется обеспечить асимптотическую устойчивость замкнутой системы путем формирования алгоритма управления напряжением
– постоянная момента. Требуется обеспечить асимптотическую устойчивость замкнутой системы путем формирования алгоритма управления напряжением  , с учетом ограничений и возможных отклонений значений параметров. Характеристики двигателя и параметры системы взяты из работы [3]:
, с учетом ограничений и возможных отклонений значений параметров. Характеристики двигателя и параметры системы взяты из работы [3]: 
 ,
, 
 ,
, 
 ,
, 
 ,
, 
 ,
,  Ом, максимальное значение напряжения
Ом, максимальное значение напряжения 
 .
.
РЕЛЕЙНОЕ УПРАВЛЕНИЕ ПО ИЗМЕРЕНИЮ ОТКЛОНЕНИЯ ОТ ВЕРТИКАЛИ
Рассмотрим управляющее воздействие на ведущем колесе робота в виде релейной функции
 . (2)
. (2)
При таком управлении область устойчивости по Ляпунову замкнутой системы будет находиться внутри ограниченной области, построенной на фазовом портрете системы (рис. 3). Для исследования системы применен метод фазовой плоскости [4]. Учитывая, что управляющее воздействие принимает два значения, фазовая плоскость замкнутой системы получается в результате объединения двух фазовых портретов линейных систем по линии переключения  .
.
Анализ построенного фазового портрета показывает, что платформа робота совершает периодическое движение около требуемого положения равновесия.

Рис. 3. Фазовый портрет системы для релейного управления по углу отклонения от вертикали.
Для обеспечения асимптотической устойчивости замкнутой системы рассмотрим движение системы при релейном управлении
 ,
,
где  – формируемый в системе командный сигнал по измерению угла и угловой скорости движения платформы для переключения релейного элемента системы управления. Коэффициент
– формируемый в системе командный сигнал по измерению угла и угловой скорости движения платформы для переключения релейного элемента системы управления. Коэффициент  выбирается из условия обеспечения асимптотической устойчивости системы на скользящем режиме функционирования, при котором система движется по линии переключения
выбирается из условия обеспечения асимптотической устойчивости системы на скользящем режиме функционирования, при котором система движется по линии переключения  к началу координат.
к началу координат.
Практическая реализация релейного управления на скользящем режиме и точность стабилизации системы зависит от уровня случайных помех в измерениях датчиков робота – акселерометра, гироскопа и оптико-электронной системы определения угла отклонения от вертикального положения платформы, имеющихся в наборе Лего. Проведенный численный анализ решения проиллюстрируем на рис. 4.
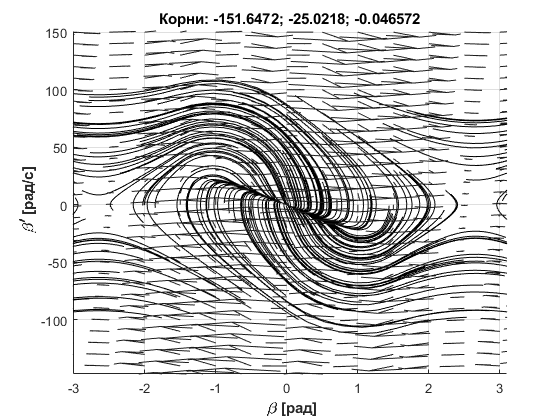
Рис. 4 Фазовые траектории замкнутой системы
Анализ полученных результатов показывает, что при начальном отклонении платформы робота от вертикали на угол порядка десяти градусов обеспечивается асимптотическая устойчивость системы и требуемый характер переходных процессов.
ЗАКЛЮЧЕНИЕ
Построенная математическая модель описывает плоское движение балансирующего робота типа Сегвей. Разработаны элементы системы автоматической стабилизации вертикального неустойчивого положения платформы. Проведен анализ фазовых портретов замкнутой системы управления. Планируется практическая реализация предложенных алгоритмов в бортовой системе управления макетного образца робота.
ЛИТЕРАТУРА
1. Мартыненко Ю.Г., Формальский А.М. Маятник на подвижном основании // Доклады академии наук, 2011, том 439, № 6, с. 746–751
2. Капица П. Л. Маятник с вибрирующим подвесом// УФН, 1951. т. 44. Вып. 1. С. 7—20
3. Self-Balancing Two-Wheeled Robot Controller Design // электронный ресурс https://www.mathworks.com/matlabcentral/fileexchange/19147-nxtway-gs-self-balancing-two-wheeled-robot-controller-design (дата обращения 27.02.2019)
4. Ким Д. П. Теория автоматического управления. Т. 2. Многомерные, нелинейные, оптимальные и адаптивные системы: Учеб. пособие. - М.: ФИЗМАТЛИТ, 2004. - 464 с.
Дата добавления: 2021-01-20; просмотров: 135; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!