ОТНОСИТЕЛЬНОЕ И ИСТИННОЕ ДВИЖЕНИЕ .
БЕЗОПАСНОЕ РАСХОЖДЕНИЕ СУДОВ В МОРЕ .
Наиболее тяжелые последствия вызывают столкновение судов в море. Одним из направлений понижения аварийности на судах является совершенствование средств и методов для предупреждения столкновений судов в море. Разрабатываются и внедряются специальные автоматизированные системы.
Основой безопасности расхождения судов в море является надлежащее наблюдение, по результатам которого оценивается обстановка и если необходимо следует производить расчеты для безопасного расхождения. С этой целью ПРАВИЛО 7в (МППСС-72) рекомендует вести «...радиолокационную прокладку или равноценное систематическое наблюдение за обнаруженными объектами…».
Сейчас, насколько возможно, рассмотрим и теоретически обоснуем радиолокационную прокладку, а также и равноценное ей систематическое наблюдение.
ВЕКТОР .
ВЕКТОРОМ называется величина, определяющаяся своим численным значением и направлением в пространстве, подчиняющаяся правилу геометрического сложения.
В математике с векторами производятся все математические действия. Действия сложения и вычитания двух векторов возможно осуществить двумя независимыми способами: геометрическим и аналитическим.
В нашем случае будем рассматривать только два математических действия: сложение и вычитание на плоскости и только геометрическим способом.
Вектор геометрически отображается стрелкой ( РИС. 1 ):
длина отрезка, изображенного стрелкой - АВ, в масштабе соответствует скорости движения;
направление стрелки указывает куда совершается движение.
А 
V
В
РИС. 1 вектор скорости – как количественную, так и её направление.
Символика: V – скорость; V – вектор скорости.
Точка А – начало вектора,
точка В – конец вектора.
Одним из основных элементов в радиолокационной
прокладке является вектор скорости.
А Отличие скорости от вектора скорости в том,
что скорость выражает количественную величину,а
1
1.1 СЛОЖЕНИЕ ДВУХ ВЕКТОРОВ СКОРОСТЕЙ.
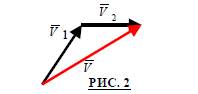
Геометрическая сумма – V двух скоростных векторов – V1 иV2, построеных на плоскости друг за другом. ( РИС.2 ) , выражается стрелкой соединяющей начало первого вектора скорости V1 с концом второго вектора скорости V2 .
V = V1 + V2
В результате сложения векторов получаем ВЕКТОРНЫЙ СКОРОСТНОЙ ТРЕУГОЛЬНИК прямого построения, где направление вектора V всегда направлено от начала вектора V1 к концу вектора V2 .
1.2 ВЫЧИТАНИЕ ВЕКТОРОВ СКОРОСТЕЙ .
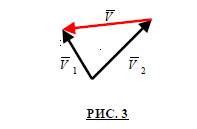
Разностью двух скоростных векторов V1 и V2 является скоростной вектор V полученный от построения ВЕКТОРНОГО СКОРОСТНОГО ТРЕУГОЛЬНИКА, две стороны которого являются V1 и V2 построенных так, что их начало расположено в одной точке, а концы их соеденены с вектором V, направление которого всегда направлено в сторону уменьшаемого вектора. ( РИС. 3 ).
V = V1 - V2
ОТНОСИТЕЛЬНОЕ И ИСТИННОЕ ДВИЖЕНИЕ .
Любое движение, морское или сухопутное, можно рассматривать двояко, т.е. как ОТНОСИТЕЛЬНОЕ или как ИСТИННОЕ.
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ, это движение, контроль за которым ведется относительно любого ПОЛЮСА, выбранного самим наблюдателем. Полюсом может быть любой ориентир на поверхности Земли, кроме географических полюсов Земли.
ИСТИННОЕ ДВИЖЕНИЕ, это движение по поверхности Земли, контроль за которым осуществляется относительно земных географических ПЛЮСОВ.( Широтой и долготой ). Безусловно, такое истинное движение не будет обсалютно истинным движением, которое может быть получено только с учетом вращения Земли, ее движением по эклиптике и т. д.
1) При использовании РЛС, в условиях ограниченной видимости, все параметры (пеленг и дистанция) измеряются с судна наблюдателя. Чтобы выяснить как, по отношению к судну наблюдателю (полюсу), будет перемещаться видимый эхо-сигнал от другого судна, необходимо выполнить прокладку и проследить за его движением , т.е. необходимо выполнить относительную прокладку.
2.1 ОТНОСИТЕЛЬНАЯ ПРОКЛАДКА.
Относительная радиолокационная прокладка получила широкое распространение в судовождении. В условиях ограниченной видимости с помощью РЛС можно качественно оценить окружающую обстановку при условии ведения радиолокационной прокладки.
Если РЛС стабилизирована по КУРСУ или по СЕВЕРУ в режиме относительного движения, то наблюдатель на экране РЛС видит только перемещение эхо-сигнала относительно своего судна, считая себя в центре развертки РЛС и своего движения не видит. Это наблюдаемое движение является ОТНОСИТЕЛЬНЫМ ДВИЖЕНИЕМ. Перенеся такое движение на маневренный планшет или лист бумаги, получим относительную радиолокационную прокладку, которая отображает взаимное расположение судов по времени и позволяет оперативно решить вопросы:
насколько опасно плавание со встречными судами, т.е. на каком кратчайшем расстоянии разойдемся с судами ( Дкр ) ;
как быстро наступит момент кратчайшего сближения нашего судна с другими (Ткр).
Суть ОТНОСИТЕЛЬНОЙ Р.Л. ПРОКЛАДКИ заключается в следующем (РИС. 4) :
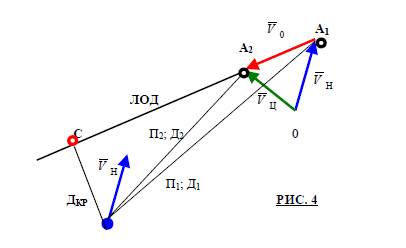
По результатам радиолокационного наблюдения необходимо, по меньшей мере, выбрать две точки А1 и через промежуток времени Т точку А2 (на практике предпочтение отдается Т = 6 мин., т.е. 1:10 часа), взять их позиции по пеленгу – П и дистанции – Д , нанесём на планшет или бумагу. Пример: Позиция точки А1 будет П1 и Д1, а точки А2 будет П 2 и Д2. Расстояние пройденное эхо-сигналом от А1 до А2 обозначим стрелкой, направленной в сторону смещения эхо-сигнала, получим вектор относительной скорости V0. за время Т . До тех пор пока сохроняется неизменным V0 , эхо-сигнал цели будет перемещаться в направлении этого вектора и со скоростью равной его длине. Зная направление и скорость движения эхо-сигнала можно проложить путь его будущего движения. Прямая линия, проведенная через точки А1 и А2 в направлении движения эхо-сигнала цели называется ЛИНИЕЙ ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ или сокращённо ЛОД .
Движущейся эхо-сигнал цели по ЛОД имеет место, где он сблизится с нашим судном на самое кратчайшее расстояние- ДКР. Перпендикуляр, опущенный из центра планшета или точки
3
О на листе бумаги (с расположения нашего судна) на ЛОД, есть ДКР, а пересечение этого перпендикуляра с ЛОД даст точку С при выходе эхо-сигнала в которую между нашим и наблюдаемым судами будет самое близкое расстояние.
Время, необходимое для перехода эхо-сигнала цели от первой точки наблюдения А1 до выхода в точку кратчайшего сближения С, принято называть ТКР, которое найдем:
ТКР = А 1 С : V0
Где: А1С – расстояние от первой точки наблюдения до точки кратчайшего сближения с целью;
V0 - относительная скорость.
Для определения элементов движения цели ( ЭДЦ), т.е. истинного курса и скорости цели, исходим из следующего: наше судно и цель имеют каждый свое истинное направление движения и истинную скорость, т.е. имеются два истинных вектора Vн и Vц . На экране РЛС мы не видим своего вектора скорости Vн , а видим вектор относительной скорости V0. А если из двух истинных векторов скоростей Vн и Vц , существующих реально, убрать вектор нашей скорости, то получим вектор относительной скорости V0 , математически будет выражаться так :
Vц _ Vн = V0
Где: Vц – неизвестный вектор, Vн – известный вектор, V0 - получено из РЛ прокладки.
Преобразуем предыдущую формулу и получим неизвестное Vц :
Vн + V0 = Vц
Для нахождения неизвестного вектора цели необходимо геометрически сложить два известных вектора, т.е. построить векторный скоростной треугольник. Из РЛ прокладки, имеем вектор относительной скорости V0 (РИС. 4), к его началу, своим концом, построим вектор нашей скорости. Суммарный третий вектор, проведенный из начала вектора нашей скорости на конец вектора относительной скорости даст вектор скорости цели Vц. Его направление это истинный курс цели, а длина, во временном масштабе, это истинная скорость цели. При построении векторного скоростного треугольника существуют три постоянные свойства:
ПЕРВОЕ свойство:Вектор нашей скорости ВСЕГДА строится таким образом, что его конец распологается в первой точке наблюдения.
ВТОРОЕ свойство:Вектор нашей скорости и вектор скорости цели ВСЕГДА начинаются в одной точке О .
ТРЕТЬЕ свойство:Вектор относительной скорости ВСЕГДА начинается на конце вектора нашей скорости и заканчивается на конце вектора скорости цели.
Дата добавления: 2020-11-27; просмотров: 1532; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!