Принцип относительности Галилея
Механические силы
Механические силы это сила тяжести и вес тела, силы упругости и трения.
Происхождение силы тяжести связано с одним из фундаментальных взаимодействий — гравитационным .
Другое фундаментальное взаимодействие — электромагнитное, то есть взаимодействие между электрическими зарядами и токами, лежит в основе сил, связанных с деформацией тел. Это, прежде всего силы упругости, а также силы трения, возникающие за счет деформации при соприкосновении шероховатых поверхностей.
Сила тяжести и вес.
Еесли не учитывать силу сопротивления воздуха, действующую на движущееся в нём тело, то все тела будут падать на Землю с одним и тем же ускорением  Силу, «обеспечивающую» это ускорение, принято называть силой тяжести.
Силу, «обеспечивающую» это ускорение, принято называть силой тяжести.
В системе отсчета, связанной с Землей, на всякое тело массой m действует сила тяжести

Cчитаем силу тяжести совпадающей с силой тяготения (силой гравитационного притяжения тела к Земле).

Рис. 2.15. Силы, действующие на неподвижное тело
Сила, с которой тело действует на подвес или опору, называется весом тела.
Когда тело покоится, то сила тяжести уравновешивается реакцией опоры или подвеса, то есть

По третьему закону Ньютона вес тела  равен
равен 
Если же тело вместе с опорой или подвесом движется с ускорением, то вес тела не равен силе тяжести.
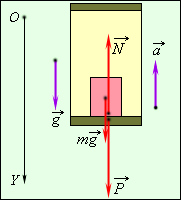
Рис. 2.16. Силы, действующие на тело, движущееся ускоренно
Попутно напомним, что, по определению, вертикальным (вниз) направлением называется направление вектора свободного падения  . Соответственно, любое направление перпендикулярное является горизонтальным.
. Соответственно, любое направление перпендикулярное является горизонтальным.
|
|
|
Пусть подвес в виде укрепленной на раме пружины движется вместе с лифтом с ускорением  (рис. 2.17).
(рис. 2.17).

Рис. 2.17. Зависимость веса движущегося тела от ускорения опоры
Тогда уравнение движения тела будет иметь вид

где  r — реакция подвеса, то есть сила, с которой пружина действует на тело.
r — реакция подвеса, то есть сила, с которой пружина действует на тело.
По третьему закону Ньютона тело действует на пружину с силой, равной — r которая по определению представляет собой вес тела 
Заменив в уравнении движения реакцию опоры  r, силой —
r, силой —  , а силу тяжести
, а силу тяжести  — произведением mg, получим:
— произведением mg, получим:
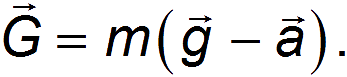
Спроецируем полученное соотношение на вертикальную ось у, направленную вертикально вниз:
Gy = m ( g - ay )
Отсюда вытекает, что по модулю вес G может быть как больше, так и меньше, чем сила тяжести P . При свободном падении рамы с подвесом

и сила G, с которой тело действует на подвес, равна нулю: наступает состояние невесомости.
«Исчезновение» веса тела, то есть силы давления на опору, не означает исчезновения инерционных свойств тела (его массы).
|
|
|
Сила упругости. При деформации тела возникают силы упругости, препятствующие этой деформации.
При небольших деформациях возникающие силы пропорциональны величине деформации. Если пружина в нормальном (ненагруженном) состоянии имеет длину x 0 и мы деформируем ее (растягиваем или сжимаем) ее до длины x, то на нашу руку действует сила упругости
Fx = ˗ k ( x ˗ x 0 )
где k – коэффициент жесткости пружины,
знак «минус» указывает, что сила упругости препятствует деформации пружины. Приведенное уравнение описывает простейший случай закона Гука.
Сила трения. При соприкосновении чистых — свободных от жидкой смазки — поверхностей твердых тел между ними возникают силы, называемые силами сухого трения.
Их характерная черта: эти силы не обращаются в нуль даже при отсутствии относительного движения соприкасающихся тел.
Трение, которое может существовать между телами, не движущимися друг относительно друга, называется трением покоя.
Имеет место следующее утверждение относительно силы трения покоя:
Сила трения покоя всегда равна по величине и противоположна по направлению внешней силе, которая в отсутствие трения должна была бы вызвать относительное скольжение тел.
|
|
|
Однако сила трения покоя не может превосходить некоторой максимальной величины fmax .
Пока внешняя сила меньше fmax я. относительное скольжение тел не возникает, так как сила трения покоя «автоматически» принимает значение, компенсирующее действие внешней силы.
Силы сухого трения между объектами, движущимися друг относительно друга, называются силами трения скольжения.
Они довольно сложным образом зависят от скорости относительного движения, но для широкого класса явлений и соприкасающихся пар материалов их можно считать постоянными и равными максимальному значению силы трения покоя. Они направлены так, чтобы препятствовать относительному проскальзыванию соприкасающихся тел.
Для максимального значения силы трения покоя экспериментально установлено соотношение — закон Амонтона-Кулона:
Максимальная сила трения покоя пропорциональна силе нормального давления, прижимающего соприкасающиеся тела
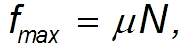
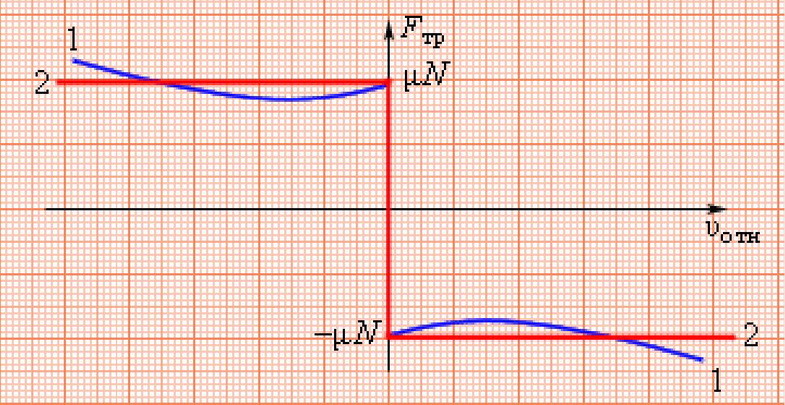
Рис. 2.21. Зависимость силы трения от относительной скорости тел
где μ — коэффициент трения покоя, зависящий от свойств соприкасающихся поверхностей. Характерные значения μ приведены в таблице.
Коэффициент трения покоя для некоторых пар соприкасающихся материалов
|
|
|

Коэффициент трения покоя сильно зависит не только от материалов соприкасающихся тел, но и от состояния (обработки) их поверхностей, а также от присутствия посторонних веществ, например, ржавчины на поверхности стальных деталей.
Сухое трение возникает при соприкосновении прижатых друг к другу тел в результате их относительного перемещения. Поверхности реальных тел не являются гладкими, на них имеются шероховатости (рис. 2.20).

Рис. 2.20. Механизм возникновения сухого трения
При контакте твердых тел между ними действуют не только силы сухого трения (покоя или скольжения). Из-за деформации тел могут возникать также силы трения качения. Они гораздо меньше сил трения покоя, и ими обычно пренебрегают.
Следующий пример демонстрирует случай, когда сила реакции опоры не параллельна силе тяжести. Пусть тело массой m скользит по наклонной плоскости, которая составляет угол α с горизонтом (рис. 2.22).
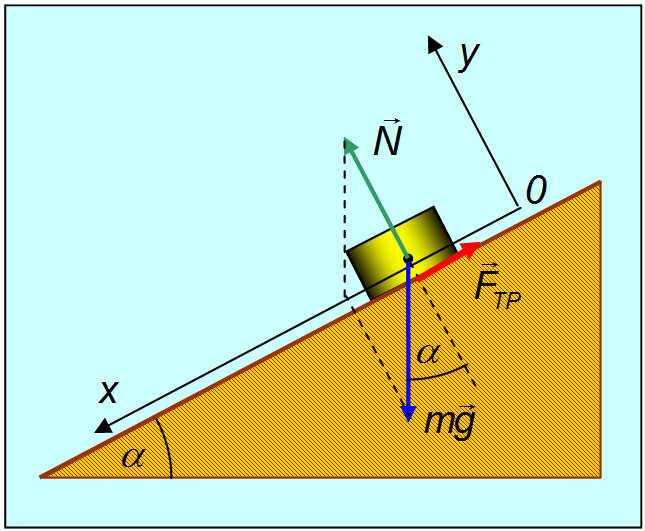
Рис. 2.22. Движение тела по наклонной плоскости
Сила сопротивления среды. При движении тела в жидкой или газообразной среде на него действует сила сопротивления среды, зависящая от скорости тела. При малых скоростях движения сила сопротивления пропорциональна скорости

Сила сопротивления направлена против вектора скорости тела.
Зависимость силы сопротивления от скорости тела приводит к существованию установившейся скорости движения, когда сила сопротивления достигает величины движущей силы.
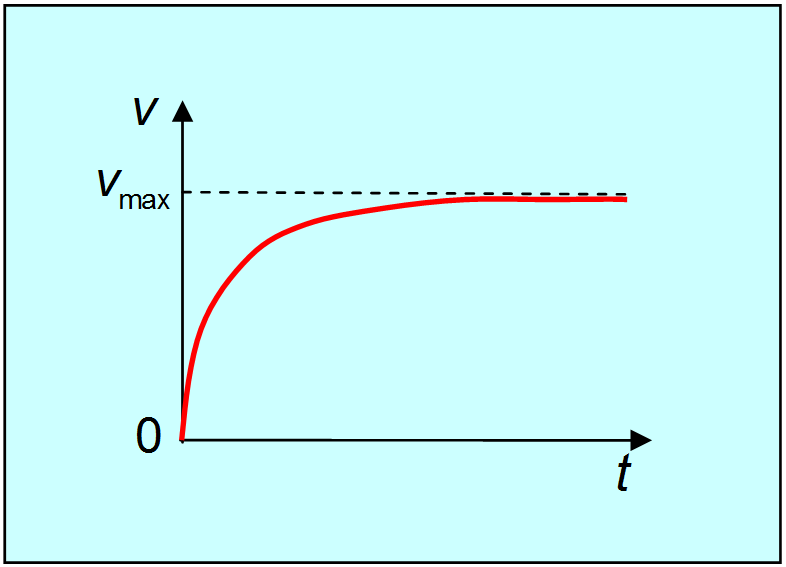
Рис. 2.23. Скорость движения тела в вязкой среде
Закон сохранения импульса
Рассмотрим систему N материальных точек m 1, m 2, …, mN , положения которых задаются радиус-векторами r 1, r 2 ,…, rN , а их импульсы равны P 1 , P 2 …, PN , соответственно (рис. 2.24).
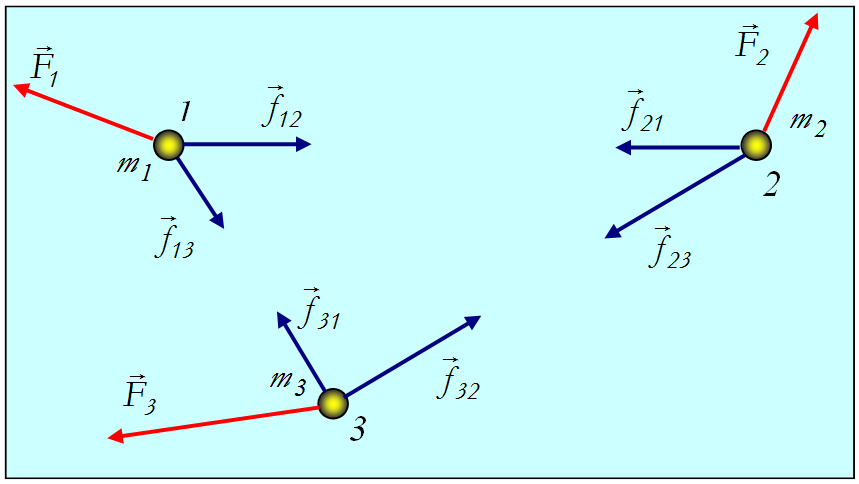
Рис. 2.24. Система взаимодействующих частиц
Среди сил, действующих на эти материальные точки, будем различать внутренние силы, действующие между телами, входящими в систему, и внешние силы, действующие на систему со стороны тел, в нее не включенных.
Внутренние силы будем обозначать как  , где индексы показывают, что данная сила действует на тело с номером i со стороны тела с номером j. Кроме того, на тело с номером действует какая-то внешняя сила
, где индексы показывают, что данная сила действует на тело с номером i со стороны тела с номером j. Кроме того, на тело с номером действует какая-то внешняя сила  .
.
Напишем уравнение второго закона Ньютона (скорость изменения импульса тела равна сумме всех действующих на тело сил) для всех N материальных точек системы

Сложим вместе эти N уравнений. Сумма всех внутренних сил в правой части получится равной нулю. Действительно, она состоит из парных слагаемых типа
По третьему закону Ньютона силы взаимодействия двух материальных точек i и j равны по величине и противоположно направлены (действуют вдоль прямой, соединяющей эти материальные точки):
Поэтому в правой части у нас останется только сумма всех внешних сил:

Сумма импульсов частиц, образующих механическую систему, называется импульсом системы.


Рис. 2.25. Суммарный импульс осколков снаряда равен импульсу самого снаряда до взрыва.
Импульс системы удовлетворяет уравнению

Система тел, взаимодействующих только между собой и не взаимодействующих с другими телами, называется замкнутой.
Иными словами, на замкнутую систему не действуют внешние силы. При отсутствии внешних сил
откуда

Суммарный импульс

замкнутой системы сохраняется, то есть постоянен во времени.
Это утверждение, известное как закон сохранения импульса, связано с фундаментальными свойствами природы (однородностью пространства), и потому справедливо не только в классической механики, но и в физике вообще.
Применение закона сохранения импульса позволяет решить многие задачи, например, когда неизвестны точные силы, действующие в системе.

Рис. 2.26. При выстреле сохраняется проекция импульса вдоль ствола орудия
Принцип относительности Галилея
Рассмотрим тело, находящееся настолько далеко от других тел, что оно не испытывает никаких воздействий со стороны последних. Такое тело назовем свободно движущимся. Если теперь с таким телом связать систему отсчета, то в ней свободное движение другого тела выглядит наиболее просто: оно будет равномерным и прямолинейным. Это и есть закон инерции, открытый Галилеем. Смысл закона заключается именно в том, что
Существует такая система отсчета, в которой свободная материальная точка находится в покое или движется равномерно и прямолинейно.
Система отсчета, в которой выполняется первый закон Ньютона, называется инерциальной.
Инерциальная система отсчета — тоже определенная абстракция, используемая в науке. На практике свободно движущееся тело, равно как и инерциальная система отсчета, могут существовать лишь с большей или меньшей точностью.
В большинстве случаев нашу планету можно выбирать в качестве инерциальной системы отсчета (геоцентрическая система). В других случаях, например, для описания движения планет, в качестве таковой выбирается система, связанная с Солнцем (гелиоцентрическая система).
Первый закон Ньютона постулирует, что существует такая система отсчета, в которой свободная материальная точка находится в покое, или движется равномерно и прямолинейно. Но если существует хотя бы одна инерциальная система, то любая другая система отсчета, движущаяся относительно нее равномерно и прямолинейно, также будет инерциальной.
Установим связь в описании движения той же материальной точки, рассматриваемой относительно двух разных систем отсчета.
Пусть дана система отсчета с началом координат в точке 0 и пусть дана другая система отсчета с началом координат в точке 0' (рис. 2.31).
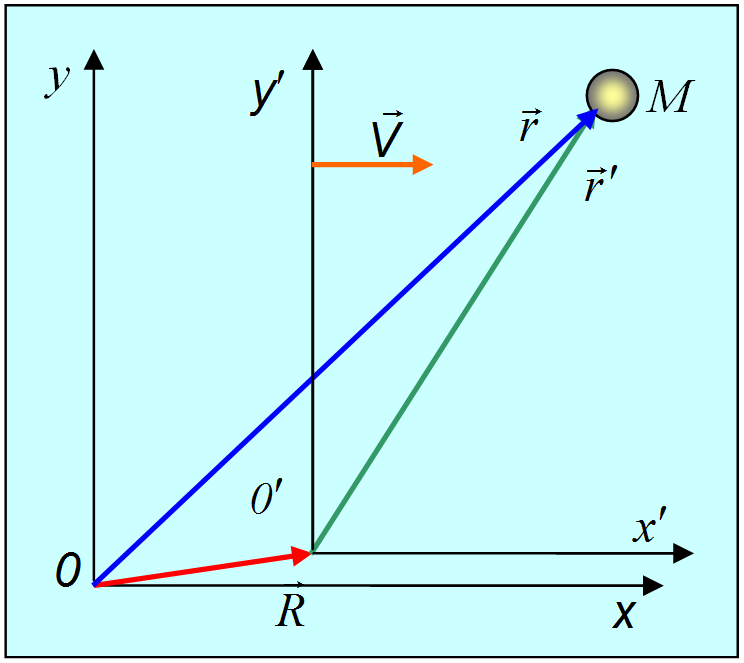
Рис. 2.31. Движение тел в двух разных системах отсчета
Все величины, относящиеся к этой системе отсчета, мы будем снабжать знаком штриха (x', y', z' и т.п.). Положение начала отсчета 0' относительно системы 0 характеризуется радиус-вектором R ( t )..
Рассмотрим движение материальной точки М. Ее положение относительно системы 0 задается радиус-вектором r ( t ), а относительно 0' — радиус-вектором r ( t )'. Исходя из правил сложения векторов, можем написать

Дифференцируем данное соотношение по времени и получаем:

Здесь v, v ' — скорость материальной точки М относительно систем 0 и 0', соответственно. Вектор V — скорость «штрихованной» системы отсчета относительно «нештрихованной». Мы получили закон сложения скоростей классической механики:
Скорость v точки относительно системы О может быть представлен а как векторная сумма ее скорости v ' относительно системы О' и скорости vсистемы О' относительно системы О.
Если система О' движется относительно О прямолинейно и равномерно, то V не зависит от времени. Дифференцируя полученный закон сложения скоростей по времени, находим, что ускорения точки М относительно обеих систем отсчета одинаковы:

Если  , то и , то есть закон инерции Галилея выполняется в обеих системах отсчета. Стало быть, если система О инерциальная, то инерциальной будет и система О'.
, то и , то есть закон инерции Галилея выполняется в обеих системах отсчета. Стало быть, если система О инерциальная, то инерциальной будет и система О'.
Законы механики имеют одинаковый вид во всех инерциальных системах отсчета, которые являются физически эквивалентными (не отличимыми друг от друга). Это и составляет принцип относительности Галилея:
Уравнения, выражающие законы природы, инвариантны по отношению к преобразованиям координат и времени от одной инерциальной системы отсчета к другой.
Одинаковость вида уравнений движения во всех инерциальных системах отсчета не означает, что одно и тоже движение выглядит одинаково в любой инерциальной системе, так как кроме уравнений движения (законов Ньютона) закон движения тела определяется также начальными условиями, которые, в движущихся относительно друг друга инерциальных системах отсчета, естественно, различны: начальные скорости разные
Если начальные условия различны, то одно и то же движение тела выглядит по-разному в различных инерциальных системах отсчета. В качестве примера рассмотрим падение мячика с верхушки мачты установленной на платформе (рис. 2.31).
С точки зрения наблюдателя на платформе мячик движется прямолинейно: падает с нулевой начальной скоростью по вертикали вниз. В то время как для наблюдателя, находящегося на берегу, траектория мяча — парабола: мячик имеет отличную от нуля горизонтальную начальную скорость.
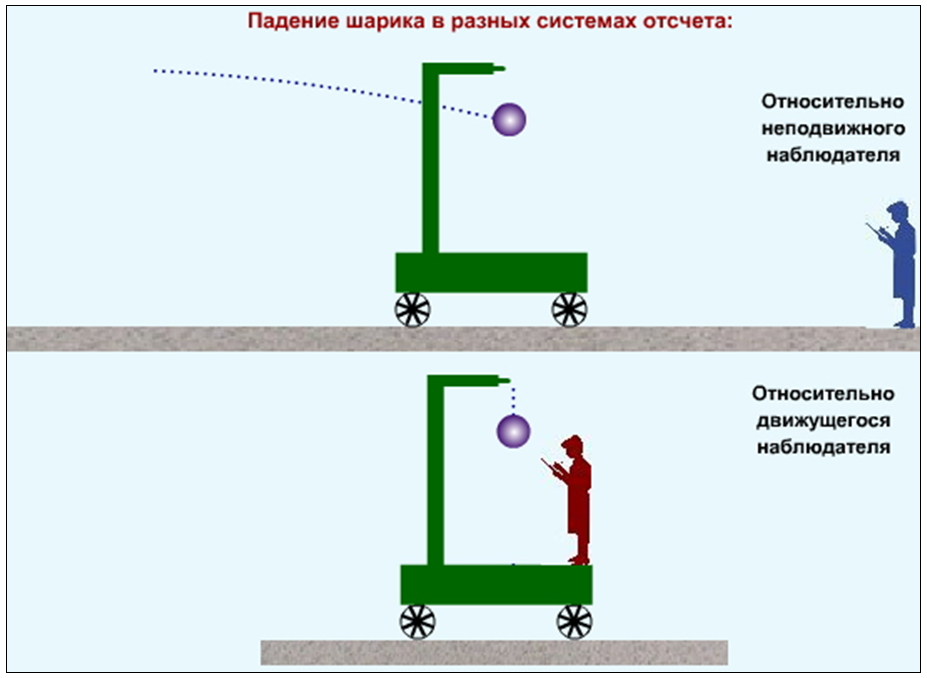
Рис. 2.31. Движение тела в разных инерциальных системах отсчета
Связь координат точки в разных системах отсчета дается полученным выше уравнением

Его можно записать в виде уравнений для компонент вдоль осей координат.
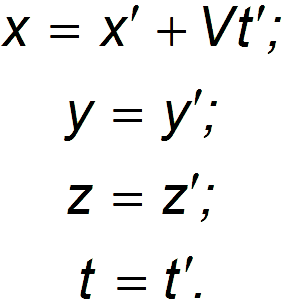
Для упрощения формул часто поступают следующим образом. Во-первых, оси систем выбираются параллельными, причем ось х указывает направление движения системы О' относительно системы О. Во-вторых, за начало отсчета времени выбирают момент, когда совпадали начала координат обеих систем. Тогда

и мы получаем преобразования Галилея
Силы инерции
Возьмем уединенное тело, не подверженное воздействию других тел. Если следить за ним из неинерциальной системы отсчета, то, подобно пассажирам автобуса, оно не будет оставаться в покое или двигаться прямолинейно и равномерно. А раз его скорость меняется, то отлично от нуля ускорение тела. Значит, умножив ускорение на массу, мы можем по второму закону Ньютона найти действующую на тело силу. Такого рода силы не совсем обычны в том смысле, что мы не можем указать тела, со стороны которых они действуют. В остальном они ничем не отличаются от прочих сил, с которыми мы уже знакомы.
Силы, действующие на тела в неинерциальных системах отсчета, и не обусловленные взаимодействием этих тел с другими телами, называются силами инерции.
Силы инерции вполне реальны, их можно измерить, но наблюдаются они только в неинерциальных системах отсчета.
Силы инерции не являются следствием взаимодействия данного тела с другими телами.
Силы инерции являются следствием неинерциальности системы отсчета. Для одного и того же тела эти силы различны и имеют разные свойства в разных неинерциальных системах отсчета в зависимости от характера движения неинерциальной системы отсчета относительно инерциальной. Однако, как уже было сказано, их проявления вполне реальны и измеримы.
Дата добавления: 2020-11-15; просмотров: 96; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!