Анализ результатов имитационного моделирования
Отчет
По лабораторным работам
По дисциплине
«Информационно-статистическая теория измерений»
На тему
«Оптимальная фильтрация в комплексной навигационной системе»
Выполнили студенты группы 3О-506С-15:
Дашковский Е.А.
Салихов А.Р.
Синицкий П.Ю.
Принял доцент кафедры 305: Веремеенко К.К.
Цель работы: изучение принципов построения инерциально-спутниковых навигационных систем как наиболее перспективного бортового навигационного средства, а также исследование их ошибок.
Теоритическая часть
В настоящее время одной из наиболее широко применяемых в авиации навигационных систем является инерциальная навигационная система (ИНС). Хорошо известны преимущества этих систем:
- полная автономность работы;
- высокая информативность (система позволяет определять все параметры движения объекта – координаты, проекции скоростей и углы ориентации);
- высокая скорость выдачи информации потребителю (частота обновления информации около 10 Гц по координатам и скорости и около 100 Гц по параметрам ориентации);
- высокая помехозащищенность;
- высокая стабильность показаний на ограниченном интервале времени работы.
Вместе с тем, эти системы обладают существенным недостатком: их ошибки неограниченно возрастают со временем. Это явление связано, прежде всего, с наличием инструментальных дрейфов гироскопов и требует принятия специальных мер для ограничения роста ошибок.
|
|
|
Одним из наиболее перспективных средств коррекции для ИНС являются спутниковые навигационные системы (СНС), но его использованию в качестве единственного средства навигации препятствует уязвимость с точки зрения помехозащищенности.
Однако, сравнительный анализ показывает, что спутниковые и инерциальные навигационные системы хорошо дополняют друг друга. Их объединение позволяет ограничить рост погрешностей ИНС и снизить шумовую составляющую ошибок СНС, повысить темп выдачи информации бортовым потребителям, существенно поднять уровень помехозащищенности. В таблице 1 приводятся основные преимущества комплексных инерциально-спутниковых систем. Данные, приведенные в таблице 1, базируются на анализе большого числа работ и убедительно говорят о перспективности комплексирования СНС и ИНС.
| Факторы | Степень улучшения |
| Точность | Существенно |
| Масса | Уменьшение на 30 - 70 % |
| Объем | Уменьшение на 50 - 60 % |
| Потребляемая мощность | Уменьшение на 25 - 50 % |
| Надежность | Увеличение » в 2 раза |
| Степень резервирования | Увеличение на 50% и более |
| Стоимость | Существенно |
|
|
|
Таблица 1. «Основные преимущества интегрированных систем»
Учитывая сказанное, представляется целесообразным создание комплексных инерциально-спутниковых систем, объединяющих достоинства ИНС и СНС. Для реализации этого подхода необходимо совершенное программно-математическое обеспечение для БЦВМ, в которой должна быть организована совместная обработка данных, поступающих от ИНС и СНС.
Комплексирование ИНС и СНС в нашем случае происходит по упрощенной системе, архитектура которой изображена ниже:
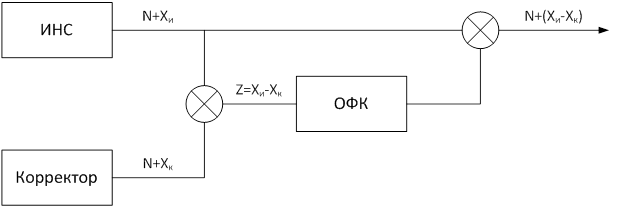 Рисунок 1 «Комплексирование ИНС и СНС»
Рисунок 1 «Комплексирование ИНС и СНС»
СНС является корректором, работающим в дифференциальном режиме.
Измерения в ОФК формируются как разность показаний ИНС и корректора между величинами одной физической природы.
Дискретный оптимальный фильтр Калмана, на выходе которого  . Это будет являться оценкой.
. Это будет являться оценкой.
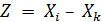
Пример формирования измерения:

где  – широта по показаниям ИНС и корректора
– широта по показаниям ИНС и корректора
 – ошибки определения в ИНС и корректоре
– ошибки определения в ИНС и корректоре
Измерение представимо в виде разности ошибок ИНС и корректора. Обычно ошибки корректора существенно меньше ошибок ИНС. На основе этих измерений должен работать ОФК. Для его работы уравнения измерения должны быть дополнены уравнением состояния и представлены в матричном виде:
|
|
|
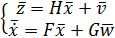
В дискретном виде в форме записи для БЦВМ это записывается так:


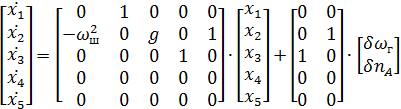
За вектор состояния примем вектор ошибок ИНС:


где  – ошибка координаты;
– ошибка координаты;
 – производная от ошибки координаты (скорость);
– производная от ошибки координаты (скорость);
 – ошибка ориентации в вычислениях БИНС;
– ошибка ориентации в вычислениях БИНС;
 – постоянный дрейф гироскопа;
– постоянный дрейф гироскопа;
 – постоянная ошибка акселерометра.
– постоянная ошибка акселерометра.
В уравнениях измерения Z с вектором состояния связана первая компонента  , вторая компонента
, вторая компонента  объявляется шумом измерений и входит в состав вектора шумов измерений.
объявляется шумом измерений и входит в состав вектора шумов измерений.
Уравнения аналоговой системы имеют вид:

 -
- 
 -
- 
где
R – радиус Земли;  – частота Шулера.
– частота Шулера.
Практическая часть
Представим блох-схему, реализующую упрощенную математическую модель ошибок ИНС, на выходе которой получается оценка вектора состояния.

Рисунок 2 «Блок-схема программы»
Расшифровка программных модулей:
· ИиОПер – блок инициализации и описания переменных, а именно вектора состояния инерциальной системы и фильтра.
|
|
|
· ВПЧ ДУ – вычисление правых частей дифференциального уравнения
· ИДУ – интегрирование дифференциального уравнения
· ФИ – формирование измерений
· ФИК - формирование измерений корректора (белый шум)
· ОФК -
· ФД – блок-файл, в котором записывается результат предыдущих преобразований входных значений
·  – условие выхода (если разность равна нулю, то программа закончит свою работу, иначе пойдет на новый цикл)
– условие выхода (если разность равна нулю, то программа закончит свою работу, иначе пойдет на новый цикл)
·  - увеличение параметра t на величину шага интегрирования h
- увеличение параметра t на величину шага интегрирования h
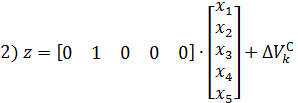
Анализ результатов имитационного моделирования
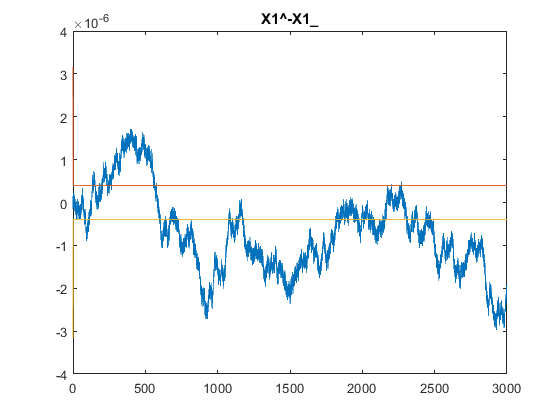
Рисунок 3 ошибка координаты
Рисунок 4 производная от ошибки координаты (скорость)
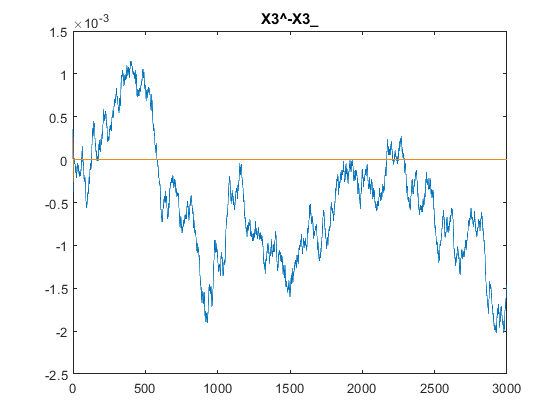
Рисунок 5 ошибка ориентации в вычислениях БИНС

Рисунок 6 постоянный дрейф гироскопа
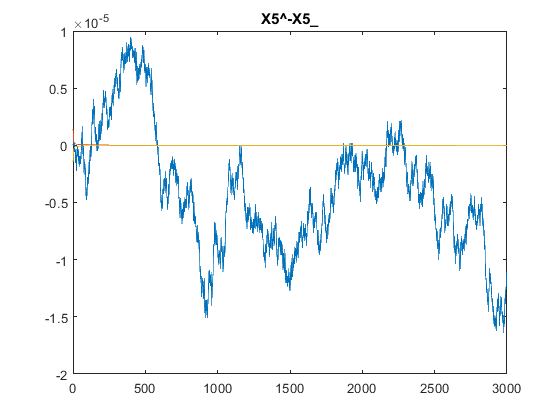
Рисунок 7 постоянная ошибка акселерометра
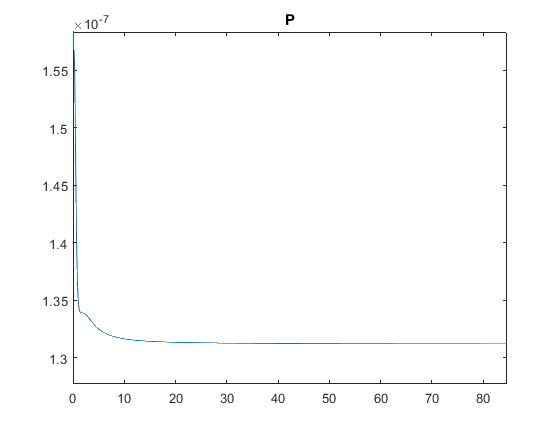
Рисунок 8 Матрица ковариации

Рисунок 9 перемещение и скорость
Дата добавления: 2020-01-07; просмотров: 77; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!