Главные обратные связи, как правило, являются отрицательными. Местные обратные связи могут иметь любой знак.
− По составу:
а) на жесткие;
б) гибкие.
Жесткая обратная связь осуществляется статическим звеном, то есть когда Wос(0) ¹ 0. Гибкая обратная связь осуществляется дифференцирующим звеном и Wос(0) = 0, следовательно, в статике сигнал обратной связи отсутствует, то есть гибкая обратная связь действует только в динамике, с чем и связано ее название.
Получение передаточных функций регуляторов
В пакете Simulink
Для получения передаточных функций идеальных регуляторов необходимо составить следующие структурные схемы:
1. П-регулятор, представляет собой идеальное усилительное звено (блок Gain), коэффициентом усиления которого является kп (рис.6.2).

Рис.6.2. Структурная схема идеального П-регулятора в пакете Simulink
2. ПД-регулятор, представляет собой параллельное соединение идеального усилительного звена (блок Gain) и последовательно соединенных идеального усилительного и дифференцирующего (блок Switched derivative for linearization) звеньев (рис.6.3).

Рис.6.3. Структурная схема идеального ПД-регулятора в пакете Simulink
Знак в сумматоре зависит от знака дифференцирующей составляющей.
3. ПИ-регулятор, представляет собой параллельное соединение идеального усилительного звена (блок Gain) и последовательно соединенных идеального усилительного и интегрирующего (блок Integrator) звеньев (рис.6.4).

Рис.6.4. Структурная схема идеального ПИ-регулятора в пакете Simulink
|
|
|
Знак в сумматоре зависит от знака интегрирующей составляющей.
4. ПИД-регулятор, представляет собой параллельное соединение идеального усилительного звена (блок Gain), последовательно соединенных идеального усилительного и дифференцирующего (блок Switched derivative for linearization) звеньев и последовательно соединенных идеального усилительного и интегрирующего (блок Integrator) звеньев (рис.6.5).

Рис.6.5. Структурная схема идеального ПИД-регулятора в пакете Simulink
Знаки в сумматоре зависят от знаков дифференцирующей и интегрирующей составляющих.
Для получения передаточных функций реальных регуляторов необходимо добавить к соответствующей структурной схеме блок Тransfer Fcn. (последовательное соединение) для учета инерционности (рис.6.6 − 6.9).
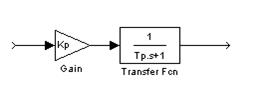
Рис.6.6. Структурная схема реального
П-регулятора в пакете Simulink
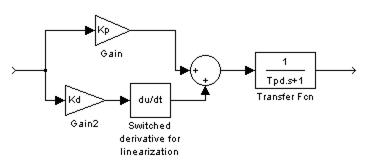
Рис.6.7. Структурная схема реального ПД-регулятора
в пакете Simulink
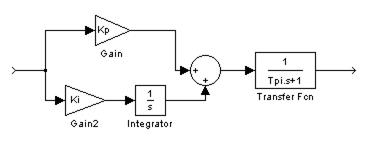
Рис.6.8. Структурная схема реального ПИ-регулятора
в пакете Simulink

Рис.6.9. Структурная схема реального ПИД-регулятора
в пакете Simulink
Общая методика синтеза линейных систем
Автоматического управления
Как уже говорилось выше, задача синтеза САУ заключается в определении управляющего устройства (регулятора), в виде его математического описания для заданных объектов управления, требований к точности и качеству управления и условий работы, включая характеристики внешних воздействий, требования к надежности, весу, габаритам, потребляемой мощности и т.д.
|
|
|
Задача синтеза обычно является задачей нахождения оптимального значения выходного параметра, поскольку требуется создать устройство, наилучшим образом удовлетворяющее требованиям по устойчивости и качеству. Однако большое число требований и их разнообразие, как правило, не дают возможности объединить их в одном критерии оптимальности и решить задачу синтеза как математическую задачу на нахождение экстремума для этого критерия.
Поэтому практически синтез САУ разбивается на ряд этапов, на каждом из которых решается какая-то часть общей задачи синтеза. Поскольку общий критерий оптимальности отсутствует, то для нахождения наилучшего решения обычно приходится производить расчет нескольких вариантов управляющего устройства (корректирующих звеньев) и их настроек, а затем в результате их сравнения выявлять оптимальный вариант.
Рассмотрим общую методику синтеза линейных САУ.
|
|
|
1. Определение основной (неварьируемой) части системы.
Часть звеньев системы обычно однозначно определяется непосредственно заданием на разработку системы. К ним относятся: объект управления, смежные с объектом звенья, и определяемые ими исполнительные и чувствительные элементы управляющего устройства.
В некоторых случаях возможно варьировать исполнительные и чувствительные элементы (например, замена датчика одного типа на датчик другого типа), но параметры этих элементов останутся неизменными, то есть неварьируемыми. Разумеется, при выборе этих звеньев необходимо исходить из предъявляемых к САУ требований (по точности, быстродействию).
В результате составляется “костяк” структурной схемы системы, которая затем дополняется корректирующими звеньями, которые обеспечивают требования по устойчивости и качеству для данной системы.
Часто задачей синтеза является выбор необходимых настроек (параметров) корректирующего звена с заранее определенной структурой (типового регулятора).
2. Определение требуемого коэффициента передачи и порядка астатизма системы.
Этот параметр САУ находится исходя из требований к точности в установившихся режимах при детерминированных воздействиях. В общем случае, при известном значении статической ошибки в установившемся режиме (s = 0), определяется требуемый коэффициент передачи системы. При этом, если коэффициент передачи оказывается настолько большим, что существенно затрудняет осуществление требований по устойчивости, целесообразно повысить порядок астатизма и этим свести до нуля статическую ошибку системы (сделать ее не зависящей от коэффициента передачи системы). В результате чего становится возможным выбирать величину этого коэффициента исходя только из соображений устойчивости и качества при нулевой статической ошибке.
|
|
|
Однако существуют системы, в которых статическая ошибка не должна быть равна нулю (в частности, системы автоматического регулирования частоты вращения судовых дизелей – для предотвращения перегрузки), и более того, существуют САУ, в которых статическая ошибка должна быть величиной регулируемой. Такие системы не могут быть астатическими, и в случае, если в этих системах невозможно обеспечить устойчивость при требуемой статической ошибке, то необходимо изменение структуры корректирующего звена либо введение дополнительных корректирующих звеньев.
На этом же этапе решается вопрос о применении управления по нескольким или по одному выделенному (основному) возмущению.
Управление по возмущению целесообразно, если есть возможность достаточно просто измерить возмущение, по которому осуществляется управление, и если такое управление требует достаточно простых корректирующих звеньев.
Такое управление часто позволяет упростить корректирующее звено по основному (обычно управляющему) воздействию, в частности, уменьшить требуемый коэффициент передачи системы в контуре управления. Кроме того, управление по возмущению, как правило, повышает качество переходных процессов в системе.
3. Выбор корректирующих звеньев и их параметров.
а) Синтез по управляющему (основному) воздействию.
В первую очередь осуществляется подборка корректирующего звена и его параметров с целью обеспечения устойчивости системы и необходимых запасов качества. Наиболее удобным способом для этого является синтез с помощью логарифмических частотных характеристик, при котором строятся требуемые частотные характеристики, из которых определяется передаточная функция требуемого корректирующего звена (вид корректирующего звена и его параметры). В пакете Simulink такая коррекция выполняется с помощью расширения SISO Design Tool (инструмент для синтеза корректирующих звеньев САУ), работа с которым будет описана ниже.
Положение корректирующих звеньев (последовательная, параллельная коррекция или в обратной связи) выбирается, прежде всего, исходя из возможности установки корректирующего звена в систему. В некоторых системах нет возможности вмешаться в обратную связь.
После обеспечения требований по устойчивости необходимо проверить показатели качества системы. Может оказаться, что требуемые показатели качества невозможно получить с помощью выбора значений параметров корректирующих звеньев, которые ранее были выбраны только по условию обеспечения устойчивости и необходимых запасов устойчивости, и потребуется дополнительная коррекция или замена корректирующего звена на корректирующее звено другого типа.
При этом необходимо обеспечивать требуемый коэффициент передачи системы, полученный на предыдущем этапе синтеза, для поддержания требуемой статической ошибки, то есть в случае синтеза по частотным характеристикам изменять частоты сопряжений (на ЛАХ), вид и наклон ЛФХ, не изменяя начальной точки ЛАХ (L(1) = 20 lg k = const).
Также кроме применения синтеза по частотным характеристикам системы возможно применять метод последовательных приближений, который заключается в варьировании передаточных функций и значений параметров корректирующих звеньев (регулятора) в широких пределах с выбором для каждого варианта корректирующего звена оптимального сочетания значений параметров настройки и с последующим сравнением полученных вариантов. После этого выбирается один оптимальный вариант корректирующего звена с ранее полученной оптимальной настройкой. При наличии нескольких очень близких вариантов корректирующих звеньев следует выбирать наиболее простой вариант для реализации (то есть наиболее простую конструкцию корректирующего звена).
б) Синтез по возмущающим воздействиям.
Корректирующие воздействия в функции внешних воздействий повышают качество переходных процессов, воздействуя на объект управления либо в функции внешних воздействий, либо в функции их производных. Порядок производной зависит от звеньев, входящих в контур управления по возмущению, то есть как от объекта управления, так и от датчика и т.д. В результате введения в САУ управления по возмущающему воздействию получаем комбинированную САУ (рис.6.10): ЧЭ и ЧЭ’ – чувствительные элементы по управляющему и возмущающему воздействиям соответственно; УУ и УУ’ – управляющие устройства (корректирующие звенья) по управляющему и возмущающему воздействиям соответственно: ОУ и ОУ’ – объект управления по управляющему и возмущающему воздействиям соответственно; ИМ – исполнительный механизм.

Рис.6.10. Функциональная схема комбинированной САУ
Главной особенностью при коррекции по возмущающим воздействиям является то, что эта коррекция не влияет на устойчивость системы, так как корректирующие звенья в цепи внешних (возмущающих) воздействий не входят в замкнутый контур САУ и соответственно не влияют на левую часть уравнения системы, следовательно, не влияют на устойчивость системы. Данное обстоятельство позволяет применять любые корректирующие звенья, не беспокоясь о том, как они повлияют на показатели устойчивости.
Для получения передаточной функции корректирующего звена по определенному возмущающему воздействию необходимо определить передаточную функцию для этого возмущающего воздействия Wxf(s), причем компенсирующие воздействия представляются как параллельные дополнительные корректирующие воздействия.
Для случая САУ, изображенного на рис.6.10:
Wxf(s) = Wоу’(s) + Wчэ’(s)×Wуу’(s)×Wим(s)×Wоу(s). (6.9)
Идеальным является независимость выходной величины от возмущающего воздействия, то есть
Wxf(s) = 0. (6.10)
Таким образом, приравняв нулю выражение (6.9), необходимо выразить из него передаточную функцию корректирующего звена по возмущающему воздействию. Для случая САУ, изображенного на рис.6.10:
Wуу’(s) = – Wоу’(s) / (Wчэ’(s)×Wим(s)×Wоу(s)). (6.11)
Чаще всего полученное корректирующее звено оказывается очень сложным или даже невозможным для реализации. В таком случае можно обеспечить нулевую статическую ошибку от возмущающего воздействия (в установившемся режиме), то есть
Wxf(0) = 0. (6.12)
При этом получаются относительно несложные корректирующие звенья, которые легко реализуются на практике (чаще всего П- или ПД- регуляторы).
В общем случае в САУ может быть любое количество возмущающих воздействий. Коррекцию следует производить по тем из них, которые наиболее сильно влияют на объект управления, которые можно измерить и по которым возможно реализовать коррекцию.
Дата добавления: 2019-11-25; просмотров: 244; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!