Генератор с независимым возбуждением. Характеристики генератора
Магнитное поле генератора с независимым возбуждением создается током, подаваемым от постороннего источника энергии в обмотку возбуждения полюсов.
Схема генератора с независимым возбуждением показана на рис. 6.
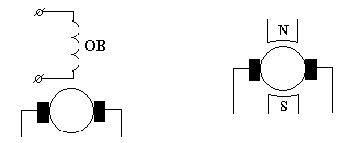
Рис. 6 Рис. 7
Магнитное поле генераторов с независимым возбуждением может создаваться
от постоянных магнитов (рис. 7).
Зависимость ЭДС генератора от тока возбуждения называется характеристикой холостого хода E = Uхх = f (Iв).
Электродвигатели постоянного тока (ДПТ). Назначение, устройство, принцип действия двигателя постоянного тока. Электрические схемы включения ДПТ.
Двигатели постоянного тока предназначены для превращения энергии постоянного тока в механическую работу.
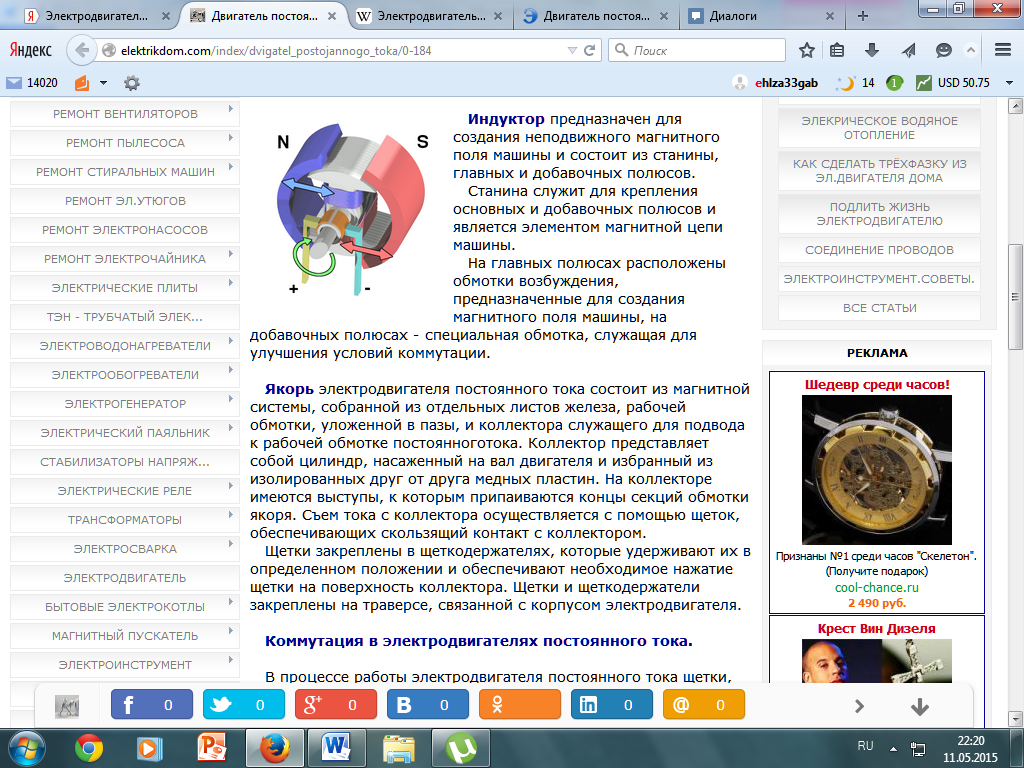
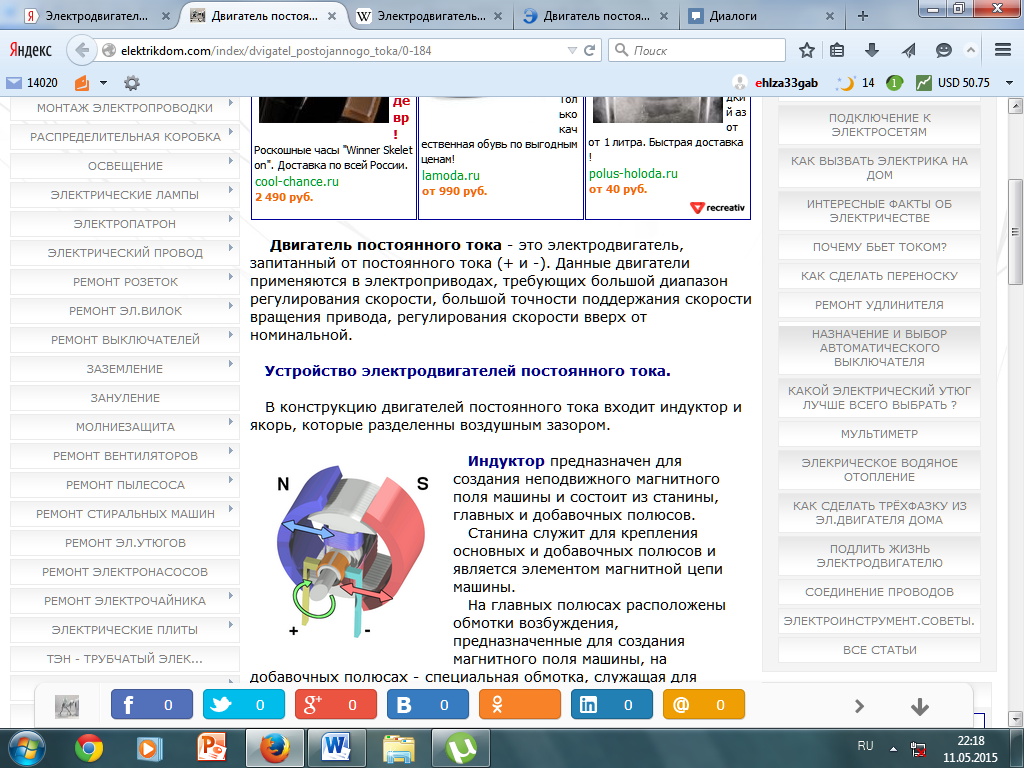
Принцип действия ДПТ основан на взаимодействии магнитных полей обмотки возбуждения и якоря. Можно представить, что вместо якоря у нас рамка, через которую протекает ток, а вместо обмотки возбуждения постоянный магнитс полюсами N и S. При протекании постоянного тока через рамку, на нее начинает действовать магнитное поле постоянного магнита, то есть рамка начинает вращаться, причем, так как направление тока не меняется, то и направление вращения рамки остается прежним.
При подаче напряжения на зажимы двигателя начинает протекать ток в обмотке якоря, на него, как мы уже знаем, начинает действовать магнитное поле машины, при этом якорь начинает вращаться, а так как якорь вращается в магнитном поле, начинает образовываться ЭДС. Эта ЭДС направлена против тока, в связи с этим её называют противоЭДС. Её можно найти по формуле
|
|
|

Пуск двигателя постоянного тока производят с помощью пусковых реостатов, которые представляют собой активные сопротивления, подключенные к цепи якоря. Выполняют реостатный пуск по двум причинам:
- при необходимости плавного разгона электродвигателя;
- в начальный момент времени, пусковой ток Iп = U / Rя очень большой, что вызывает перегрев обмотки якоря (которая имеет малое сопротивление).
В начале запуска к цепи ротора подключаются все сопротивления, и по мере увеличения скорости они ступенчато выводятся.
Основы электропривода и электроснабжения. Назначение электропривода и режимы работы электродвигателей. Расчёт и выбор электродвигателей. Управление электроприводом.
Системой электроснабжения называют совокупность устройств необходимая для производства, передачи и распределения электроэнергии, питания бытовых и промышленных приемников к которым относятся: электродвигателя, электропечи, сварочные аппараты, осветительные приборы. Система электроснабжения возникла одновременно с появлением электропривода в качестве движущей силы различных машин.
|
|
|
Электропривод – электромеханическая система, состоящая из управляющего, преобразовательного, электродвигательного (ЭДУ) и передаточного устройств, предназначенная для преобразования электрической энергии в механическую и управления ею. Электропривод получает питание от системы электроснабжения (СЭС), имеет в своем составе средства обратной связи (COС) и приводит в целенаправленное механическое движение рабочую машину (исполнительный рабочий механизм – РМ), которая нагружает его моментом Мс.
В соответствии с условиями нагрева ЭД различают 3 основных режима работы ЭП: продолжительный, кратковременный и повторно-кратковременный.
Продолжительным называют режим, длительность которого настолько велика, что температура нагрева при работе успевает достигнуть установившегося значения, а за время последующей паузы ЭД охлаждается до температуры окружающей среды. В продолжительном режиме работают ЭП судовых насосов, вентиляторов, а также гребные ЭД+
Кратковременным называют циклический режим, продолжительность рабочих периодов которого настолько мала, что температура нагрева ЭД не успевает за время работы достичь установившегося значения
|
|
|
Повторно-кратковременный режим характеризуется тем, что за время работы ЭД не успеет нагреться до установившейся температуры, а за время паузы не успеет охладиться до температуры окружающей среды.
Выбор электродвигателя и кинематический расчет привода выполняются в следующей последовательности:
Определяют общий к. п. д. привода по формуле
hобщ = h1 · h2 ·h3 … hn
Производят подбор электродвигателя по потребной мощности  ,
,
 .
.
Определяют общие передаточные числа приводов
 ,
,
Производят разбивку по ступеням одного или нескольких полученных значений uобщтак, чтобы выполнялось условие
 ,
,
Исключают из дальнейшего рассмотрения те из электродвигателей, при использовании которых передаточные числа передач выйдут за пределы рекомендуемых значений.
Управление приводами включает в себя пуск электродвигателя в работу, регулирование скорости вращения, изменение направления вращения, торможение и останов электродвигателя. Для управления приводами применяются электрические коммутационные аппараты, такие как автоматические и неавтоматические выключатели, контакторы и магнитные пускатели. Для защиты электродвигателей от ненормальных режимов (перегрузок и коротких замыканий) применяются автоматические выключатели, предохранители и тепловые реле.
|
|
|
Дата добавления: 2019-09-13; просмотров: 183; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!