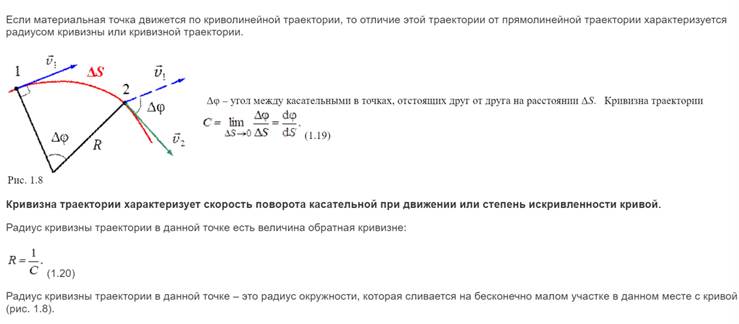
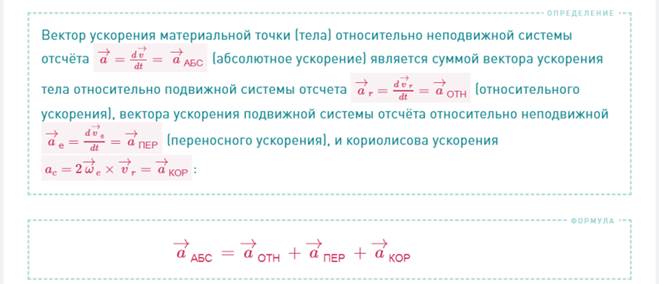
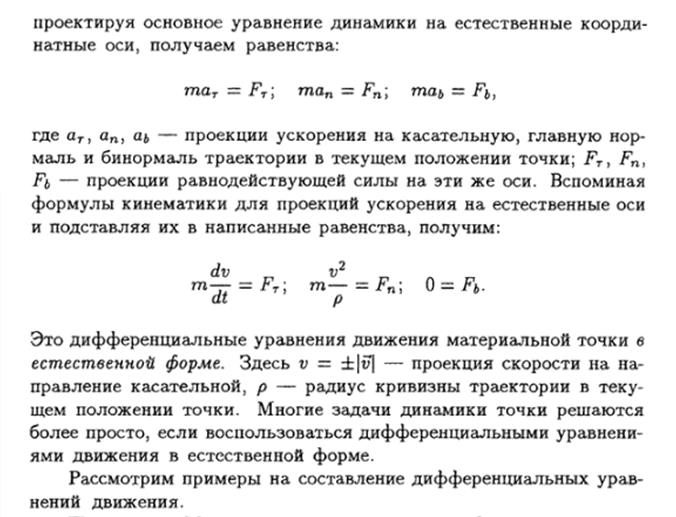
Направление вектора мгновенной скорости
Механическое движение - изменение положения объекта в пространстве с течением времени.
Модели материальных движений:
· материальная точка - объект, размерами которого можно пренебречь в условиях данной задачи;
· система материальных точек - система взаимодействующих между собой материальных точек;
· абсолютно твёрдое тело
· деформируемое тело
· сплошная среда
Свойства пространства и времени:
· однородность (равноправие точек пространства и моментов времени);
· изотропность (только для пространства)
Относительность движения - величины, зависящие от выбора системы отсчета, в которой производится их измерение.
Важная особенность мех. движения – его относительность.
Относительность движения – это перемещение и скорость тела относительно разных систем отсчета различны (например, человек и поезд). Скорость тела относительно неподвижной системы координат равна геометрической сумме скоростей тела относительно подвижной системы и скорости подвижной системы координат относительно неподвижной. (V1 – скорость человека в поезде, V0- скорость поезда, то V=V1+V0).
Система отсчета — система, состоящая из системы координат и системы измерения времени (часов). Система отсчета позволяет определить положение тела в пространстве и момент времени, когда оно занимает это положение (в идеале — любого тела в любой момент времени).
В систему отсчета входят: тело отсчёта (Тело, относительно которого рассматривается движение тел), координаты, часы.
|
|
|
Основная задача механики состоит в определении положения (координаты) тела в любой момент времени.
Виды движения:
· Поступательное (прямолинейное, криволинейное)
· Вращательное (относительно оси собственного вращения, относительно точки)
· Сложное ( плоское, пространственное)
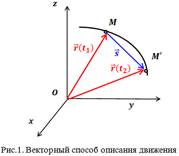
2. Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.
Радиус - вектор - вектор, задающий положения точки в пространстве (например, евклидовом) относительно некоторой заранее фиксированной точки, называемой началом координат. Для произвольной точки в пространстве, радиус-вектор — это вектор, идущий из начала координат в эту точку.
Законы движения:
· Векторный способ описания движения
Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.
Рассмотрим движение точки  в некоторой системе отсчета
в некоторой системе отсчета  (рис.1). Зададим радиус-вектор точки
(рис.1). Зададим радиус-вектор точки  — вектор, соединяющий начало координат с этой точкой.
— вектор, соединяющий начало координат с этой точкой.
При движении точки вектор будет с течением времени изменяться, т.е. будет каким-то образом зависеть от времени. Эта зависимость  представляет собой закон движения в векторном виде.
представляет собой закон движения в векторном виде.
|
|
|
В процессе движения конец радиус-вектора будет описывать траекторию, а его изменение – перемещение точки.
Перемещение - изменение положения физического тела в пространстве с течением времени относительно выбранной системы отсчёта. Применительно к движению материальной точки перемещением называют вектор, характеризующий это изменение.
Для того, чтобы охарактеризовать насколько быстро изменяется в пространстве положение движущегося тела, используют специальное понятие скорость.
Скорость – это отношение пройденного пути ко времени, за который он пройден. Она показывает, как быстро изменяется положение тела в пространстве. Поскольку скорость – это вектор, то она также указывает, в каком направлении движется тело или точка тела.
Средней скоростью тела на данном участке траектории называется отношение пройденного пути ко времени движения, м/с:

Мгновенная скорость – это скорость тела в данный момент времени или в данной точке траектории. Это векторная физическая величина, численно равная пределу, к которому стремится средняя скорость за бесконечно малый промежуток времени.
|
|
|
Другими словами, мгновенная скорость – это первая производная радиус-вектора по времени.
Вектор мгновенной скорости всегда направлен по касательной к траектории тела в сторону движения тела.
Мгновенная скорость дает точную информацию о движении в определенный момент времени.
Направление вектора мгновенной скорости

Ускорение – это величина, равная отношению изменения скорости движения тела к длительности промежутка времени, за которое это изменение скорости произошло. Среднее ускорение на основе этого определения равно, м/с²:

Мгновенным ускорением называется физическая величина, равная пределу, к которому стремится среднее ускорение за промежуток ∆t → 0, м/с²:

Поскольку вдоль траектории скорость может изменяться как по величине так и по направлению, вектор ускорения имеет две составляющие.
Составляющая вектора ускорения а, направленная вдоль касательной к траектории в данной точке, называется тангенциальным ускорением, которое характеризует изменение вектора скорости по величине.
Составляющая вектора ускорения а, направленная по нормали к касательной в данной точке траектории, называется нормальным ускорением. Оно характеризует изменение вектора скорости по направлению в случае криволинейного движения. Естественно, что когда тело движется по траектории, являющейся прямой линией, нормальное ускорение равно нулю.
|
|
|
Прямолинейное движение называется равнопеременным, если за любые промежутки времени скорость тела изменяется на одну и ту же величину. В этом случае отношение
∆V/ ∆t одинаково для любых интервалов времени. Поэтому величина и направление ускорения остаются неизменными: а = const.
3. Координатный способ описания движения
Координатный способ описания движения – описание изменения во времени координат точки в выбранной системе отсчета.
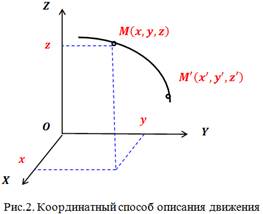
При координатном способе положение точки в пространстве задается тремя координатами (рис.2). Выбор системы координат зависит от конкретной задачи. Можно работать в декартовой (прямоугольной) системе, иногда удобнее бывает сферическая или цилиндрическая системы координат.
В декартовой системе координат положение точки определяется тройкой чисел  — ее декартовыми координатами.
— ее декартовыми координатами.
Чтобы задать закон движения точки, необходимо знать значения ее координат в каждый момент времени. Закон движения в координатном виде в общем случае представляет собой систему трех уравнений
Между векторным и координатным способом описания движения существует непосредственная связь, а именно: числовые значения проекций радиус-вектора движущейся точки на координатные оси системы с тем же началом отсчета равны координатам точки.
Проекции вектора скорости точки на оси декартовой системы координат равны первым производным от соответствующих координат точки по времени:
 ;
;  ;
;  .
.
Полный модуль скорости точки равен:
 .
.
Направляющие косинусы, определяющие направление вектора скорости точки в пространстве, вычисляются по формулам:
 ;
;  ;
;  .
.
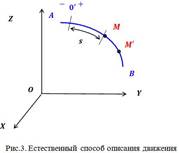
4. Естественный способ описания движения – описание движения вдоль траектории. Этим способом пользуются, когда траектория точки заранее известна.
Пусть точка М движется вдоль траектории АВ в системе отсчета Oxyz (рис.3). Выберем на траектории какую-нибудь неподвижную точку О1, которую будем считать началом отсчета, и определим положительное и отрицательное направления. Тогда положение точки M будет определяться расстоянием S от точки О1. При движении точка М переместится в точку М1, соответственно изменится ее расстояние от точки О1. Таким образом, расстояние S зависит от времени, а характер этой зависимости позволит определить положение точки М на траектории в любой момент времени. Закон движения в этом случае имеет вид: s=s(t). Точка задаётся 3 координатами, они называются криволинейными координатами
По определению скорости материальной точки можем записать V (t) =
r
Здесь ~r = ~r (t) – движение точки P , заданное векторным способом; V (t) – ее скорость
в момент времени t .
Согласно связи векторного способа с естественным имеем ~
r (s) – естественная параметризация траектории движения, а s(t) – закон движения по
этой траектории. Дифференцируя r (s(t)) по t , получаем
где t — орт касательной к траектории в той ее точке, с которой совпадает положение
материальной точки Р в момент времени t .
а) скорость V (t) параллельна t — орту касательной к траектории в том поло-
жении точки М , которое она занимает в момент времени t ;
б) [V (t)] =[ s’] .
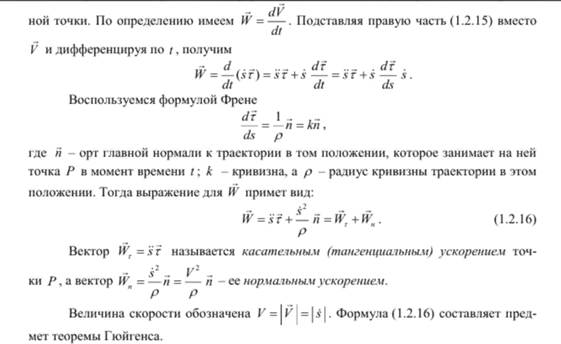
Обратимся теперь к выводу формулrы для вычисления ускорения W материаль-
ной точки.
5.
Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени 
Размерность угловой скорости - радиан в секунду (рад/с)
Если объект перемещается по кругу и его скорость меняется, тогда присутствует угловое ускорение. Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение аτнормальное ускорение аn) и угловыми величинами (угол поворота Dj, угловая скорость w, угловое ускорение ε выражается следующими формулами:

6.
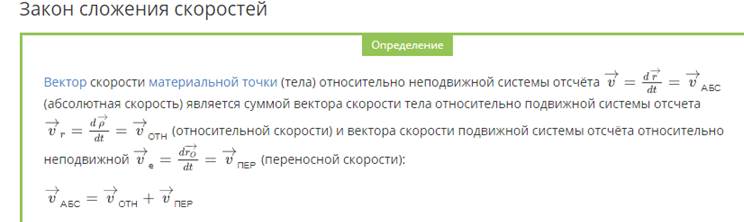
Закон сложения скоростей
Если тело движется относительно системы отсчета К1 со скоростью V1, а сама система отсчета К1 движется относительно другой системы отсчета К2 со скоростью V, то скорость тела (V2) относительно второй системы отсчета К2 равна геометрической сумме векторов V1 и V.
К2 - неподвижная система отсчета
V2 - скорость тела относительно неподвижной системы отсчета (К2)
К1 - подвижная система отсчета
V1 - скорость тела относительно подвижной системы отсчета (К1)
V - скорость подвижной системы отсчета (К1) относительно неподвижной системы отсчета (К2 )
Скорость тела относительно неподвижной системы отсчета равна векторной сумме скорости тела относительно подвижной системы отсчета и скорости подвижной системы отсчета относительно неподвижной системы отсчета.
V2→=V1→+V⃗
ИЛИ
Данный закон сложения скоростей справедлив только при скоростях, много меньших скорости света в вакууме. При релятивистских скоростях он имеет другую форму.
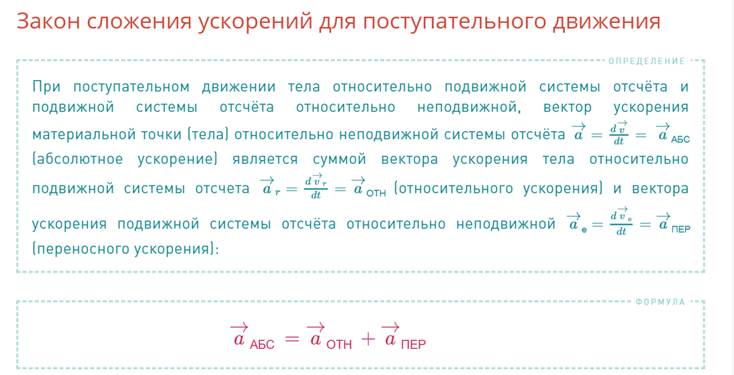
Теорема Кориолиса
7. Объясните классификацию движений материальной точки по траектории: прямолинейное, криволинейное; по характеру изменения скорости и ускорения: равномерное, равнопеременное, произвольное, циклическое и колебательное.
Классификацию видов движения материальной точки проведем с использованием введенных кинематических характеристик.
В зависимости от формы траектории механические движения подразделяются на два вида (§ 2): прямолинейное (  n = 0) и криволинейное ( n
n = 0) и криволинейное ( n  0).
0).
В зависимости от характера изменения скорости механические движения подразделяются также на два вида: равномерное (|  | = const, t = 0) и неравномерное (| | const и | | const)
| = const, t = 0) и неравномерное (| | const и | | const)
Частный случай неравномерного (переменного) движения – равнопеременное движение (| | const, но |  | = const и | t| = const).
| = const и | t| = const).
1. Прямолинейное движение ( n = 0)
а) Равномерное прямолинейное движение (модуль скорости и направление скорости не изменяются). Полное ускорение равно (12):
 ; = const.
; = const.

б) Равномерное прямолинейное движение (модуль скорости изменяется на равную величину за любые равные интервалы времени: | | = const, направление скорости не изменяется). Полное ускорение равно (12):
; = const.
– Если направления векторов тангенциального ускорения и скорости совпадают: (модуль скорости увеличивается: v > v0 и | | = const) – это равноускоренное движение.( рис 17 а).
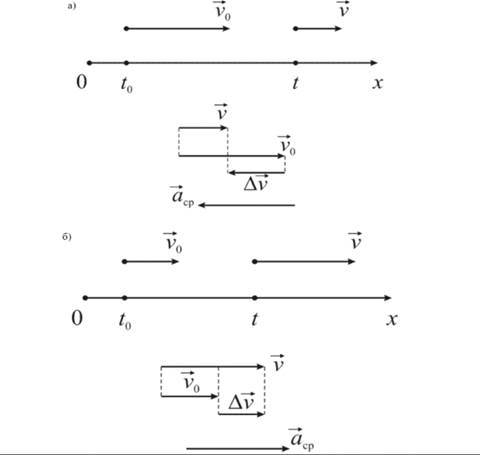
Рис 17
– Если направления векторов тангенциального ускорения и вектора скорости противоположны: t  (модуль скорости уменьшается: v > v0 и | | = const) – это равнозамедленное движение (рис. 17б).
(модуль скорости уменьшается: v > v0 и | | = const) – это равнозамедленное движение (рис. 17б).
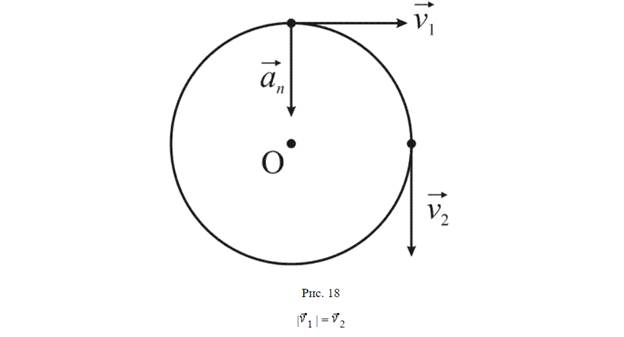
2. Криволинейное движение
(движение материальной точки по окружности – простейшее криволинейное движение)
а) Равномерное движение материальной точки по окружности (модуль скорости t не изменяется, но направление скорости изменяется t 0 изменяется – рис. 18). Полное ускорение равно (12):
 ;
;  ,т.е.
,т.е.  .
.
б) Равнопеременное движение материальной точки по окружности (модуль скорости изменяется, но | | = const  t 0 и направление скорости изменяется – § 5). Полное ускорение равно (12):
t 0 и направление скорости изменяется – § 5). Полное ускорение равно (12):
 ;
;  .
.
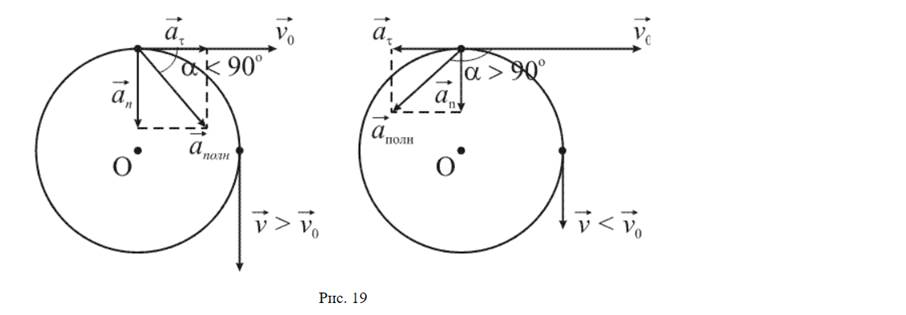
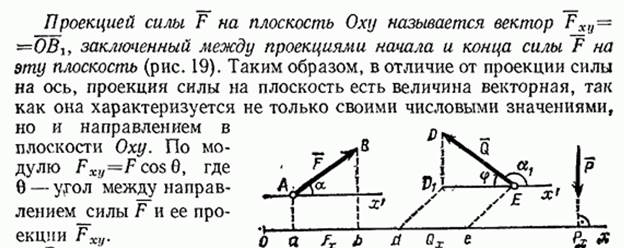
– Если направления векторов тангенциального ускорения и скорости совпадают  (модуль скорости увеличивается: v > v0, но | n| = const u n 0 и – рис. 16) – это равноускоренное движение материальной точки по окружности (
(модуль скорости увеличивается: v > v0, но | n| = const u n 0 и – рис. 16) – это равноускоренное движение материальной точки по окружности (  ( ) < 90°) – рис. 19.
( ) < 90°) – рис. 19.
– Если направления векторов тангенциального ускорения и скорости противоположны: t (модуль скорости уменьшается: v < v0, но | | = const и n 0) – это равнозамедленное движение материальной точки по окружности ( ) > 90°) – рис. 19.
Задача кинематики: определить положение материальной точки, ее скорость и ускорение в любой момент времени:

Уравнение зависимости радиус-вектора от времени или координат материальной точки от времени движения называют уравнением движения.
Ранее мы говорили, что движение – это изменение положения тела в пространстве относительно других тел с течением времени. Движение и направление движения характеризуются в том числе и скоростью. Изменение скорости и сам вид движения связаны с действием силы. Если на тело действует сила, то тело изменяет свою скорость. Если сила направлена параллельно движению тела, то такое движение будет прямолинейным. Криволинейным будет такое движение, когда скорость тела и сила, приложенная к этому телу, направлены друг относительно друга под некоторым углом (рис. 2). В этом случае скорость будет изменять свое направление.
равномерное движение – это движение, при котором за любые равные промежутки времени материальная точка (тело) совершает одинаковые перемещения, равномерное движение – это движение с постоянной скоростью, равномерное движение – это движение, при котором ускорение равно нулю
Равнопеременное движение– это: движение, при котором за любые равные промежутки времени скорость точки (тела) изменяется на одну и ту же величину, движение, при котором ускорение а материальной точки остается постоянным.
Движение, которое с течением времени полностью или частично повторяется, называется колебанием. Механические колебания – это периодические изменение физических величин, характеризующих механическое движение: положения тела, скорости, ускорения. Наиболее распространенными механическими колебательными системами являются: Грузик, закрепленный на пружине – пружинный маятник. Сообщая маятнику начальную скорость, его выводят из состояния равновесия. Маятник совершает колебания вверх-вниз. Для совершения колебаний в пружинном маятнике имеет значение количество пружин и их жесткость. Математический маятник – твердое тело, подвешенное на длинной нити, совершающее колебание в поле тяготения Земли.
Циклическое и произвольное:
8. Движение тела, брошенного под углом к горизонту, можно представить в виде суперпозиции равномерного движения вдоль горизонтальной оси и равноускоренного движения вдоль вертикальной оси. Такой «суперпозиции» можно придать наглядный смысл: пусть в ва-гоне равномерно и прямолинейно движущегося поезда вверх подброшен небольшой шарик. В системе отсчета, связанной с вагоном, шарик движется вдоль вертикальной прямой с постоянным ускорением свободного падения. А в системе отсчета, связанной с землей, движение шарика будет движением по описанной ранее параболе. Отметим также, что «разложение движения на составляющие» не является однозначным1. Так, то же движение тела, брошенного под углом к горизонту, можно представить в виде «суммы» равномерного движения вдоль прямой, направленной под углом к горизонту, задаваемой вектором начальной скорости, и равноускоренного движения вдоль вертикальной прямой. Фактически эти разложения мы использовали ранее при описании этого движения.
9. При вращательном движении вокруг оси все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью ОО' вращения. Пусть абсолютно твердое тело вращается вокруг неподвижной оси ОО'. Угол поворота dφ характеризует перемещение всего тела за время dt.
1) При свободном движении тела совершаются все три составные движения: движение точки, принятой в качестве полюса — первое переносное движение; сферическое движение оси собственного вращения по отношению к точке-полюсу —второе переносное движение; собственное вращение тела вокруг указанной оси с угловой скоростью со — относительное движение. 2) При выполнении плоскопараллельного движения относительное вращение тела с угловой скоростью происходит вокруг оси, не меняющей угловой ориентации . Она, двигаясь вместе с точкой-полюсом на_ней , совершает поступательное движение (Q =0, 0 = 0, так как направление оси не меняется). 3) Если твердое тело закреплено в одной точке О, то скорость этой точки постоянно равна нулю, поэтому движение тела в каждый момент времени представляет собой мгновенное вращение вокруг оси OR, проходящей через точку О. 4) Если твердое тело закреплено в одной точке О, то скорость этой точки постоянно равна нулю, поэтому движение тела в каждый момент времени представляет собой мгновенное вращение вокруг оси OR, проходящей через точку О.
10. Угол ∆φ называется углом поворота радиуса - вектора точки. угол поворота - физическая величина, характеризующая поворот тела, или поворот луча, исходящего из центра вращения тела, относительно другого луча, считающегося неподвижным.
Угловой скоростью вращения называется вектор, численно равный первой производной угла поворота тела по времени и направленный вдоль оси вращения по правилу правого винта:
Угловая скорость может быть связана с линейной скоростью υ произвольной точки А. Пусть за время Δt точка проходит по дуге окружности длину пути Δs. Тогда линейная скорость точки будет равна:

Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:

Связь между линейными (длина пути s, пройденного точкой по окружности радиуса R, линейная скорость v, тангенциальное ускорение aτ, нормальное ускорение an) и угловыми характеристиками (угол поворота φ, угловая скорость ω, угловое ускорение ε) выражается следующими формулами:

11. Сила в механике - это величина, являющаяся мерой механического действия на данное материальное тело других тел. Это действие вызывает изменение скоростей точек тела или его деформацию и может иметь место как при непосредственном контакте (давления прижатых друг к другу тел, трение), так и посредством создаваемых телами полей (поле тяготения, электромагнитное поле).
Сила является векторной величиной. Она характеризуется модулем, направлением и точкой приложения. Также используют понятие линия действия силы, означающее проходящую через точку приложения силы прямую, вдоль которой направлена сила.
Если к не закреплённому телу приложено несколько сил, то каждая из них сообщает телу такое ускорение, какое она сообщила бы в отсутствие действия других сил. Это утверждение, основанное на опытных фактах, носит название принципа независимости действия сил (принципа суперпозиции).
Силы, действующие при непосредственном соприкосновении, действуют по всей соприкасающейся поверхности тел. Например, молоток, ударяющий по шляпке гвоздя, действует на всю шляпку. Но если площадь соприкосновения тел мала по сравнению с их размерами, то можно считать, что сила действует только на одну точку тела. Например, можно считать, что нить, за которую тянут тележку, действует на тележку только в точке, где она привязана к тележке. Эта точка называется точкой приложения силы.
12. Моме́нт си́лы — векторная физическая величина, равная векторному произведению вектора силы и радиус-вектора, проведённого от оси вращения к точке приложения этой силы. Характеризует вращательное действие силы на твёрдое тело.


Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. В простейшем случае, если сила приложена к рычагу перпендикулярно ему, момент силы определяется как произведение величины этой силы на расстояние до оси вращения рычага.
Точка, в которой составляется уравнение момента, называется моментной точкой.
13. Сравните количественные меры инертности материальных объектов при поступательном и вращательном движениях по характеру, по изменяемости и по способам и по способам определения числовых значений.
m- скаляр; масса твердого тела и масса точки неизменны; способ определения числовых значений – взвешивание, аналитическими расчетами зависимость плотности от координат, интегрируя  , через второй закон Ньютона.
, через второй закон Ньютона.
I- тенза; момент инерции твердого тела может изменяться; способ определения числовых значений – экспериментально (крутильный маятник, маховик, скатывание по наклонной плоскости), у симметричных тел – аналитически (интегрируя), с помощью теоремы Штейнера 
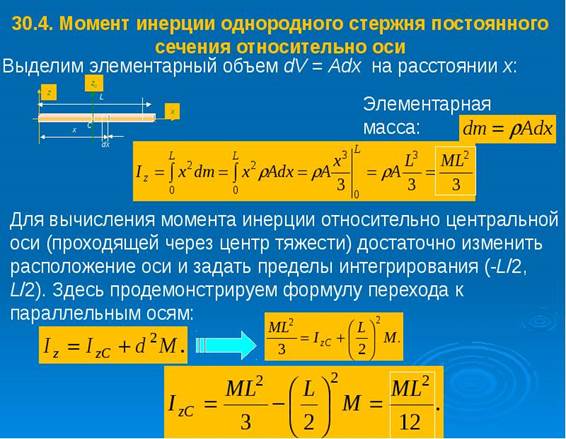
14. Выведите из общей формулы для момента инерции абсолютно твердого тела формулу для момента инерции стержня относительно оси, проходящей через его центр и перпендикулярной его длине.
15. Дайте краткую характеристику основных законов динамики материальной точки или поступательного движения твердого тела, отметив роль первого закона Ньютона, смысл видов второго закона Ньютона и свойства сил третьего закона Ньютона.
Динамикой называется раздел механики, в котором изучаются законы движения материальных тел под действием сил. В основе динамики лежат законы, установленные путем обобщения результатов целого ряда опытов и наблюдений над движением тел и проверенные обширной общественно-исторической практикой человечества. Систематически эти законы были впервые изложены И. Ньютоном в его классическом сочинении «Математические начала натуральной философии», изданном в 1687 г. Первый закон (закон инерции), открытый Галилеем (1638 г.), устанавливает, как движется материальная точка, изолированная от всяких внешних воздействий, т. е. такая, на которую не действуют никакие силы. Он гласит: изолированная материальная точка находится в состоянии покоя или равномерного прямолинейного движения. Следовательно, если F= 0, то точка движется с постоянной по модулю и направлению скоростью (V = const.); ускорение точки при этом равно нулю (w = 0). Такое движение точки называется движением по инерции. Система отсчета, по отношению к которой выполняется закон инерции, называется инерциальной системой отсчета.
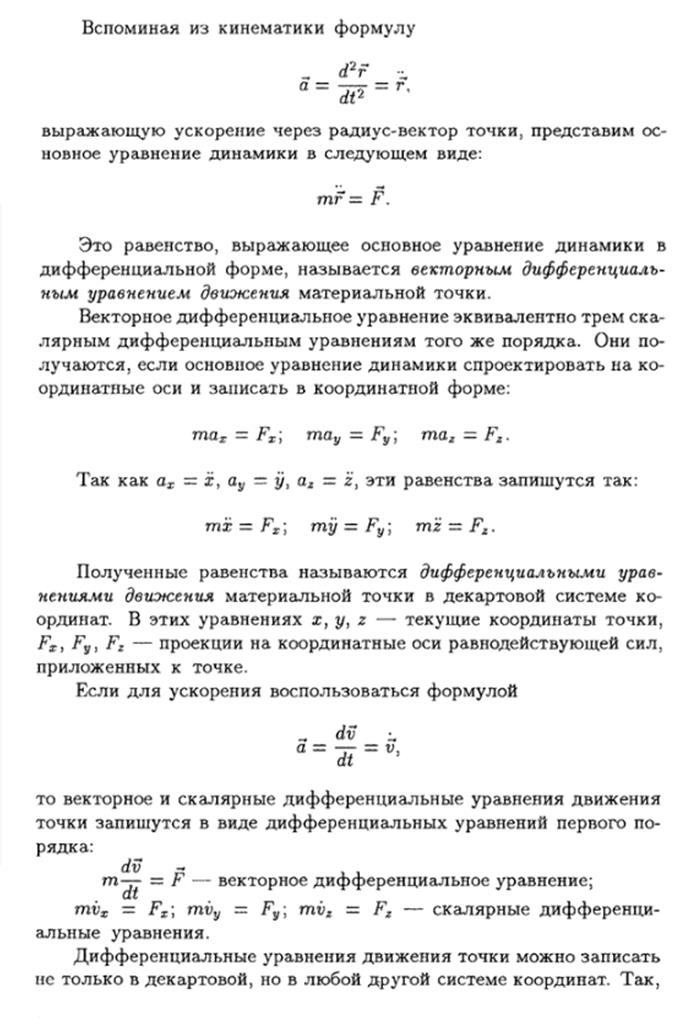
Второй закон (основной закон динамики) устанавливает, как происходит изменение скорости точки при действии на нее какой-нибудь силы. Он гласит: произведение массы точки на ускорение, которое она получает под действием данной силы, равно по модулю этой силе, а направление ускорения совпадает с направлением силы. Математически основной закон динамики выражается векторным равенством:
 (1)
(1)
Векторному (1) соответствует числовое равенство:
 (2)
(2)
Второй закон динамики, как и первый, имеет место только по отношению к инерциальной системе отсчета. Из этого закона непосредственно видно, что мерой инертности материальной точки является ее масса, так как две разные точки при действии одной и той же силы получают одинаковые ускорения только тогда, когда будут равны их массы; если же массы будут разные, то точка, масса которой больше (т.е. более инертная), получит меньшее ускорение и наоборот.
Если на точку действует одновременно несколько сил, то они, как известно, могут быть заменены одной равнодействующей  , равной геометрической сумме этих сил. Уравнение, выражающее основной закон динамики, принимает в этом случае вид
, равной геометрической сумме этих сил. Уравнение, выражающее основной закон динамики, принимает в этом случае вид
 или
или  (3)
(3)
Третий закон (закон о равенстве действия и противодействия) устанавливает характер механического взаимодействия между материальными телами. Для двух материальных точек он гласит: две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой, соединяющей эти точки, в противоположные стороны. Заметим, что силы взаимодействия между свободными материальными точками (или телами), как приложенные к разным объектам, не образуют уравновешенной системы.
Четвертый закон (закон независимого действия сил или закон суперпозиции сил)
Закон независимого действия сил утверждает: при одновременном действии на материальную точку нескольких сил ускорение точки относительно инерциальной системы отсчета от действия каждой отдельной силы не зависит от наличия других приложенных к точке сил и полное ускорение равно векторной сумме ускорений от действия отдельных сил. Между силами нет взаимного влияния друг на друга в создании ускорения точки. Если к материальной точке приложена система сил , то согласно этому закону, ускорение от действия каждой из этих сил определяется по формуле (1):
 ,
,  …
… 
16. В динамике точки решаются две основные задачи.
Первая (прямая) задача динамики. По заданному движению, совершаемому точкой данной массы, требуется найти неизвестную действующую силу.
Вторая (обратная) задача динамики. По заданным силам, действующим на точку данной массы, и заданным начальным условиям движения требуется найти закон движения точки.
Основным математическим инструментом для решения задач динамики точки служат основное уравнение динамики и вытекающие из него дифференциальные уравнения движения.

17. Силы тяготения (гравитационные силы).
В системе отсчета связанной с Землей, на всякое тело массой m действует сила:  , называемая силой тяжести – сила, с которой тело притягивается с Землей. Под действием силы притяжения к Земле все тела падают с одинаковым ускорением
, называемая силой тяжести – сила, с которой тело притягивается с Землей. Под действием силы притяжения к Земле все тела падают с одинаковым ускорением  , называемым ускорением свободного падения.
, называемым ускорением свободного падения.
Сила тяжести: Сила притяжения тел к Земле; сила тяжести – это сила тяготения; гравитационная сила приложенная к телу. 
Сила тяжести действует на всей территории Земли и других космических объектов. Зависит от массы тела.
Действует на всей территории земного шара. Чем ближе к центру Земли, тем сила тяжести увеличивается и на оборот. Сила тяжести зависит от массы тела, чем больше масса, тем большей силой тяжести оно обладает. Сила тяжести понятие относительное.
Весом тела – называется сила, с которой тело вследствие тяготения к Земле действует на опору или натягивает нить подвеса.
Невесомость - это состояние тела, при котором оно движется только под действием силы тяжести.
Силы упругости возникают в результате взаимодействия тел, сопровождающегося их деформацией.
Упругая сила пропорциональна смещению частицы из положения равновесия и направлена к положению равновесия:
 ,
,
Силы упругости имеет ряд особенностей:
возникают при деформации
возникают одновременно у двух тел
перпендикулярны поверхности
противоположны по направлению смещению.
Сила трения скольжения возникает при скольжении данного тела по поверхности другого:

Сила трения скольжения пропорциональна силе нормальной (т. е. — перпендикулярной поверхности соприкосновения тел) реакции трущихся тел.
18. Силой инерции  материальной точки называется произведение массы точки на ее ускорение, взятое со знаком минус, т. е.
материальной точки называется произведение массы точки на ее ускорение, взятое со знаком минус, т. е.  Силы инерции в динамике применяются в следующих случаях:
Силы инерции в динамике применяются в следующих случаях:
При исследовании движения материальной точки в неинерциальной (подвижной) системе координат, т. е. относительного движения. Это переносная и кориолисова силы инерции, которые часто называют эйлеровыми.
Переносная сила инерции при рассмотрении движения материальной точки в неинерциальной системе отсчёта – величина, равная произведению массы точки на её переносное ускорение и направленная противоположно этому ускорению.
Кориолисова сила инерции при рассмотрении движения точки в неинерциальной системе отсчёта – величина, равная произведению массы точки на её кориолисово ускорение и направленная противоположно этому ускорению.
Силы инерции Фе, Фс направлены противоположно ускорениям ae, ac
Причина появления силы Кориолиса — в кориолисовом (поворотном) ускорении. В инерциальных системах отсчёта действует закон инерции, то есть, каждое тело стремится двигаться по прямой и с постоянной скоростью. Если рассмотреть движение тела, равномерное вдоль некоторого вращающегося радиуса и направленное от центра, то станет ясно, что чтобы оно осуществилось, требуется придавать телу ускорение, так как чем дальше от центра, тем должна быть больше касательная скорость вращения. Это значит, что с точки зрения вращающейся системы отсчёта, некая сила будет пытаться сместить тело с радиуса.


28. Дайте математическое описание свободного гармонического колебательного движения для физического маятника с выводом дифференциального уравнения и определением из его решения периода колебаний.
Любое тело, подвешенное в поле силы тяжести так, что точка подвеса О не совпадает с центром тяжести С, называется физическим маятником.
Свободными (собственными) колебаниями называются колебания, которые происходят в отсутствие переменных внешних воздействий на колебательную систему. Они возникают вследствие начального отклонения этой системы от состояния равновесия.
Гармоническими называются колебания, при которых колеблющаяся величина х изменяется со временем по закону синуса или косинуса:
 , (10.1)
, (10.1)
здесь  – амплитуда колебаний (максимальное значение колеблющейся величины х),
– амплитуда колебаний (максимальное значение колеблющейся величины х),  – фаза колебаний,
– фаза колебаний,  – начальная фаза, ω0 – круговая (циклическая) частота собственных колебаний, связанная с периодом колебаний Т соотношением:
– начальная фаза, ω0 – круговая (циклическая) частота собственных колебаний, связанная с периодом колебаний Т соотношением:
 , (10.2)
, (10.2)
ν – частота собственных колебаний.
Для механических колебаний х имеет смысл смещения тела (материальной точки) из положения равновесия. Найдем скорость v и ускорение a колеблющегося тела:
 ; (10.3)
; (10.3)
 . (10.4)
. (10.4)
Из (10.4) получаем дифференциальное уравнение гармонических колебаний:
 .
.

 –--->
–---> 
29. Расскажите о сложении двух колебаний, происходящих вдоль одного направления с рассмотрением случая биений.
Пусть точка одновременно участвует в двух колебаниях одинаковых частот
x1 =A1 cos (ω̥ t + α1);
x2 =A2 cos (ω̥ t + α2)
Тогда результирующее смещение точки:
x = x1 + x2 x(t) = A cos (ω̥ t + α)
Представим оба колебания с помощью векторов А1 и А2 Возьмем их векторную сумму
A = A1 + A2

вектор А представляет собой результирующее колебание. Этот вектор вращается с той же угловой скоростью ω̥ , так что результирующее движение будет гармоническим колебанием с частотой ω̥ , амплитудой A и начальной фазой a. Согласно теореме косинусов:
A² = A1² + A2² + 2* A1 A2 cos ( α1 - α2)
tg α = A1*sin α1 + A2*sin α2
A1*cos α1 + A2*cos α2
Периодические изменения амплитуды колебания, возникающие при сложении двух гармонических колебаний с близкими частотами, называются биениями.
Для простоты рассмотрим случай, когда амплитуды складываемых колебаний равны A, а начальные фазы обоих колебаний равны нулю. Частоты складываемых колебаний равны, соответственно, ω и ω + ∆ω. Итак,
x1 =A cos ωt,
x2 =A cos ((ω + ∆ω)t),
Складываем эти выражения и учитываем известную формулу тригонометрии:
x = A(cos ωt + cos ((ω + ∆ω)t)) = (2 A *cos (∆ω*t/2))*cos(ω + ((∆ω*t/2)t)).
Если ∆ω<<ω то в аргументе второго косинуса мы можем пренебречь сдвигом частоты:
x≈(2A*cos(∆ω*t/2))*cosωt
Результирующее колебание можно рассматривать как гармоническое с частотой ω и амплитудой Аб, которая изменяется по следующему периодическому закону:
Аб =ⅼ 2A*cos(∆ω*t/2) ⅼ (если что, в этой формуле по сторонам модуль)

34.Объясните изменения принимаемой приемником частоты звука в эффекте Доплера.
Эффект Доплера – изменение частоты звука при относительном движении источника и приемника звука
Движение источника звука , сопровождающееся изменением расстояния от источника до приёмника ,приводит к изменению частоты принимаемого звука. Это связано с тем, что скорость распространения звуковой волны в среде не зависит от скорости движения источника.
Частота источника, если источник покоится, а наблюдатель движется:
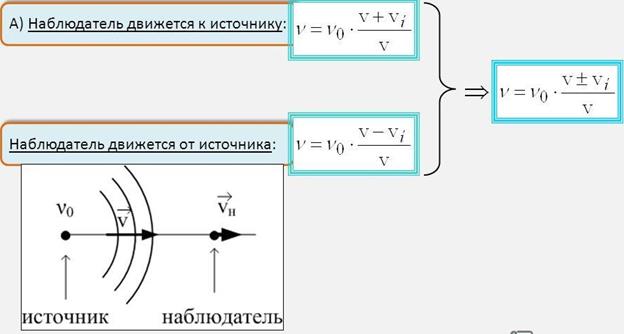
Частота источника, если наблюдатель покоится, а источник движется:
35.Приведите и объясните равенства, отражающие законы сохранения при течениях идеальной несжимаемой жидкости.
(Идеальная жидкость - жидкость без вязкости и абсолютно несжимаемая. В такой гипотетической жидкости отсутствуют силы трения и не тратится энергия на работу по их преодолению, а также плотность жидкости есть величина постоянная в любом сечении потока. Такое приближение хорошо работает при рассмотрении движения жидкости в медленных потоках или длинных трубах (до тех пор, пока не интересуются тем, что происходит у стенок) и позволяет в первом приближении решать практические задачи.)
Траектория такого жидкого элемента называется линией тока. Совокупность линий тока, близлежащих в пределах, заданных характерным временем и масштабом задачи, называется трубкой тока. Если протекание вещества не сопровождается никакими реакциями, то масса вещества в потоке сохраняется. Плотность вещества ρ и скорость v — принято относить не к движущемуся жидкому элементу, а к потоку в целом и рассматривать как функции точки ρ(r), v(r). Выделим объем, ограниченный стенками трубки тока и двумя ее сечениями, нормальными к скорости жидкости. Сокражение массы в выделенном объемме выражается равенством массы жидкости, втекающей в сечение 1 и вытекающей из сечения 2 за время dt (закон сохранения масс текущей жидкости)

уравнения Бернулли:
P + ρgh + pv2/2 = const.
формула Торричелли для скорости вытекания несжимаемой жидкости из сосуда через малое отверстие: 
Показывает, что при истечении жидкость преобретает скорость, которую получило бы тело, свободно падающее с высоты h.
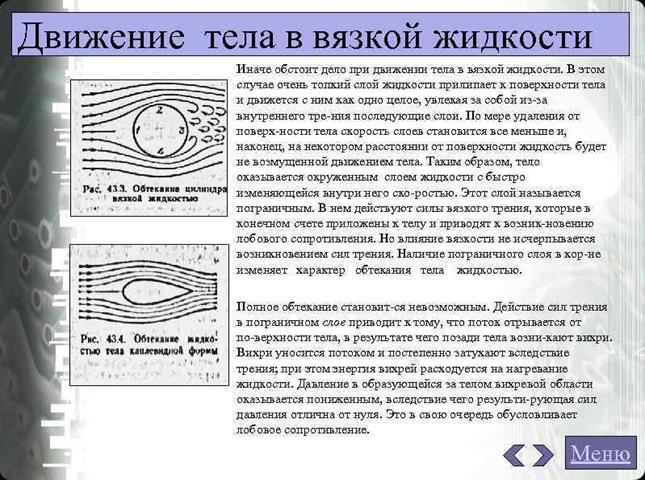
36. Расскажите о явлениях, наблюдаемых в обтекании твердых тел вязкой жидкостью.


37. 
38, 39. 
40-42 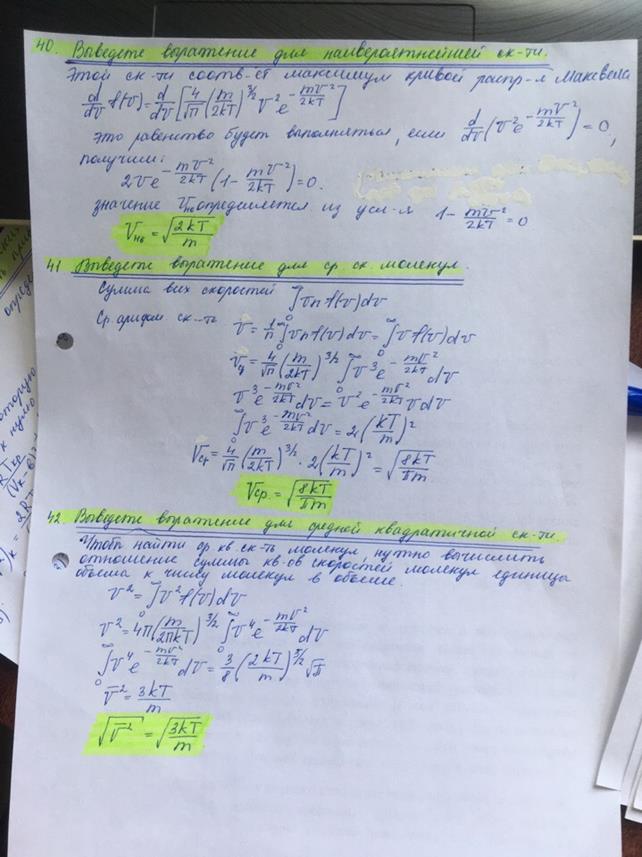
43-44 
45-46 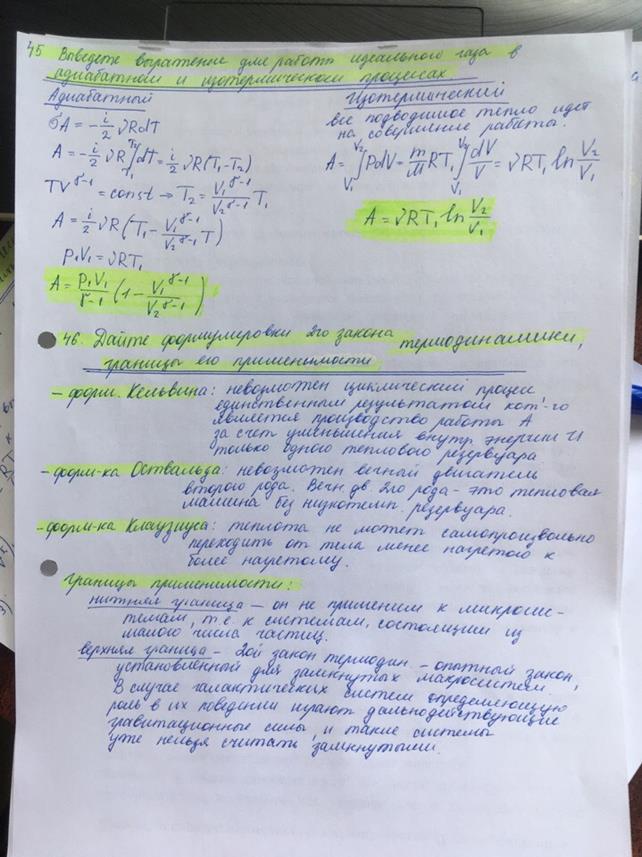
47 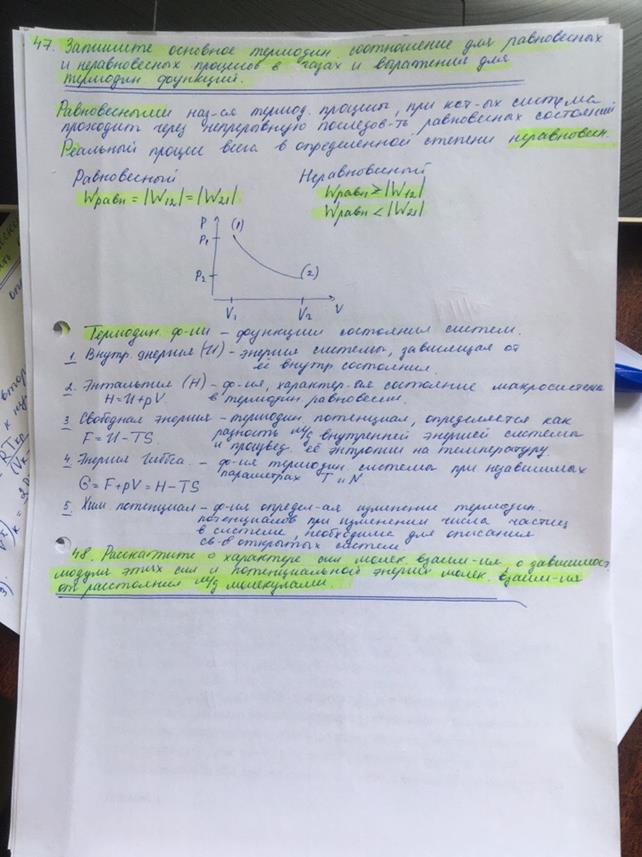
48 
49-50 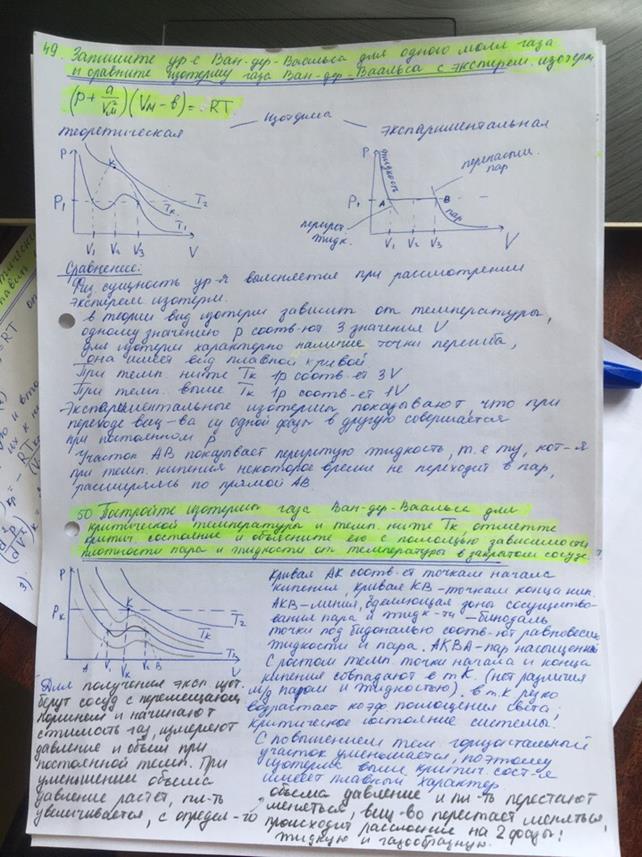
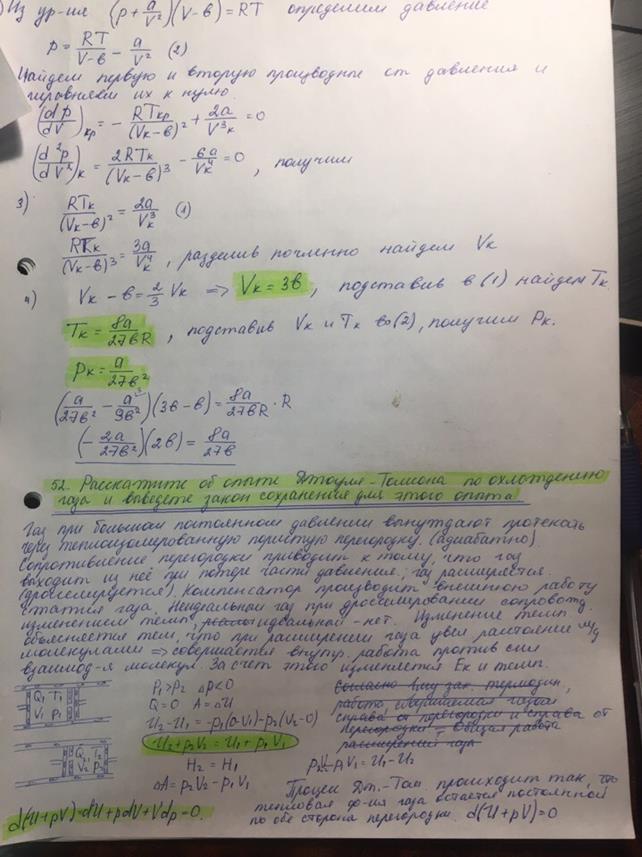
51 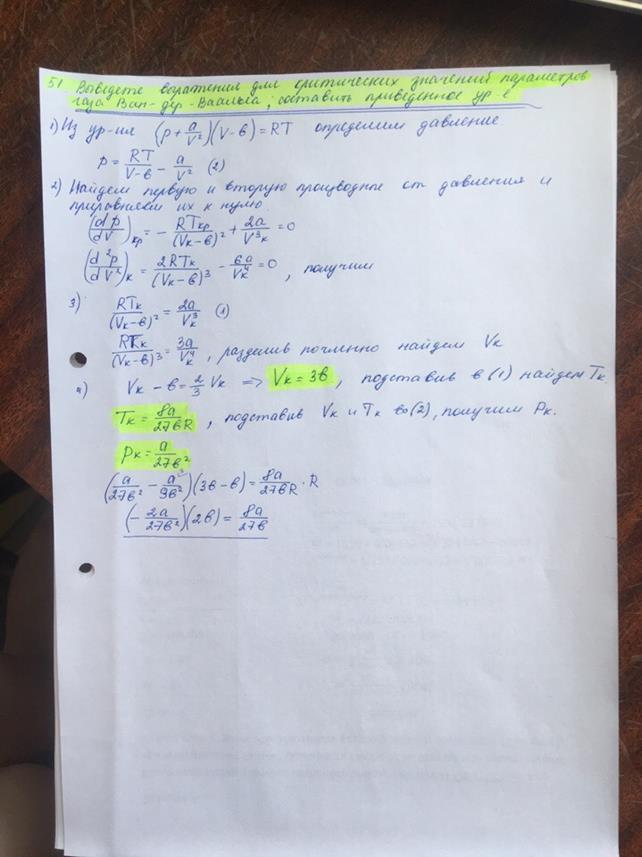
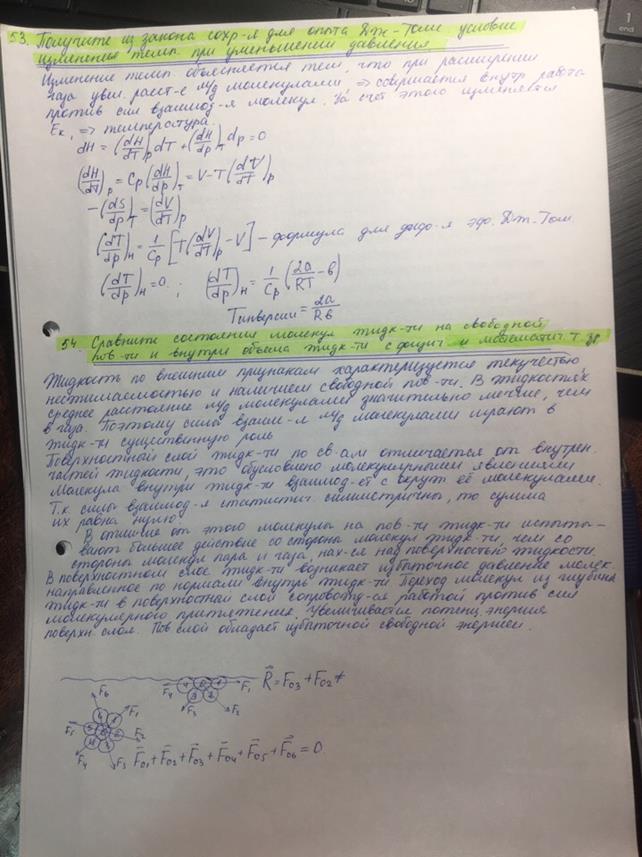
52-54
55-56
Дата добавления: 2019-09-02; просмотров: 1037; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!